一种自适应门限时间方位历程显示背景均衡算法
2019-07-16邱家兴王易川程玉胜
邱家兴,王易川,丁 超,程玉胜
(海军潜艇学院,山东 青岛 266000)
0 引 言
声呐自20世纪初问世以来,一直是水下目标探测的主要工具,其探测对象主要是海洋中的各种目标。声呐显示系统作为声呐人机交互的媒介,是声呐系统必不可少的一部分,行之有效的声呐图像处理方法也就成为了声呐功能发挥的关键环节。
时间方位历程(Bearing Time Recording,BTR)作为一种累积式显示方式,以时间方位作为横纵坐标、以灰度级表示信号幅度,能够反映目标信号和背景噪声的时域空域信息,是声呐基阵目标警戒探测画面最重要的显示方式之一。历程显示是检测微弱信号的有效技术,相比于传统方位幅度显示,在弱信号检测方面,高灰度级的方位历程显示可以提高5~7 dB的显示性能[1]。但随着声呐向远距离探测发展,监听到的目标不断增多,声呐在目标跟踪时,往往需要从多目标、强干扰中提取弱目标轨迹,这就要求更加有效的图像处理手段[2]。声呐BTR处理过程中还存在许多待解决的问题,例如,如何在尽量保护弱目标轨迹的情况下更干净地滤除背景噪声,即背景均衡问题,仍需要不断探索进步。
本文主要研究声呐BTR图的背景均衡方法。
1 背景均衡处理意义
海洋背景噪声在时空分布上具有非平稳性和非均匀性[3 – 4],在不同的时空点具有不同的分布特性。BTR显示方式涉及时间、空间的二重累积排列,在不同时间、频率和方位上的波束输出受到背景噪声的影响不同,弱目标轨迹提取难度大。
背景均衡处理能够实现恒虚警检测,降低背景噪声的起伏,实现数据动态范围的压缩,从而提高BTR图像中弱目标轨迹的提取效果。
为对比显示背景均衡的重要性,本小节对归一化的BTR峰值图在不进行背景均衡的情况下,直接进行高通滤波。
图1为某海试数据逐秒进行归一化后的BTR图(方位分辨率1°,时间分辨率1 s)。
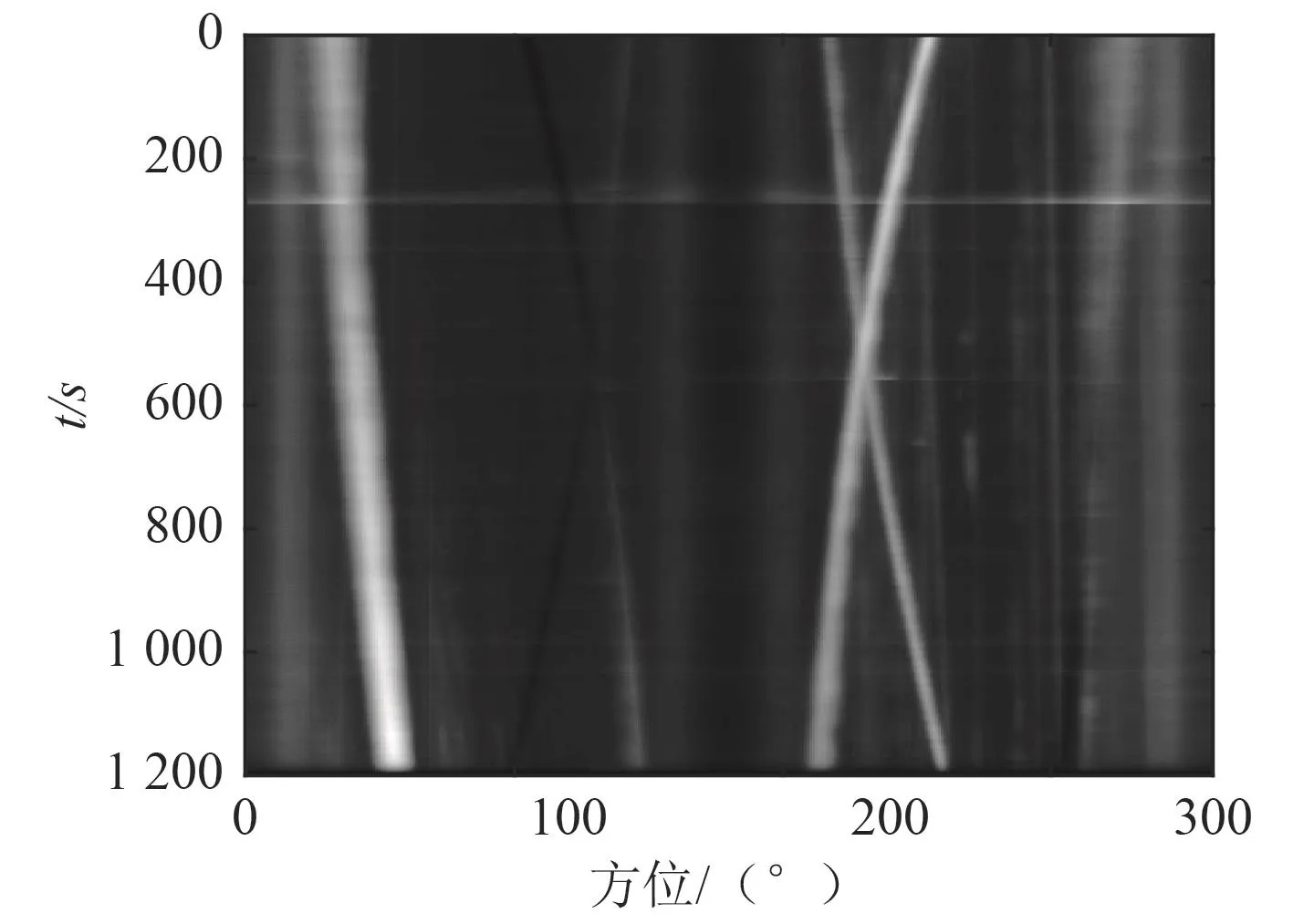
图1 归一化 BTR 图Fig. 1 The normalized BTR
图2(a)是图1的峰值图,为显示明显,将非零点幅值调整为1,得到图2(b)的等幅值峰值图。图中 70°~130°方位有大量背景噪声,250°~300°方位则有数条弱目标轨迹。该段信号强目标、弱目标与强噪声共存,十分具有典型性和代表性,适合用来验证各算法的处理能力。

图2 BTR 峰值图Fig. 2 BTR peak figure
图中右侧弱目标的幅度甚至低于背景噪声,在处理过程中易被滤除,造成信息的损失。如何在保护弱目标轨迹的同时滤除背景噪声,是背景均衡处理的重点和难点。
未经背景均衡,设置不同阈值,直接对图2进行高通滤波处理,得到图3结果(为显示明显,将非零点幅值调整为1),两幅图的滤波阈值分别为0.2和0.3。

图3 高通滤波后的峰值图Fig. 3 High-pass filtered peak figure
将图3(a)和3(b)与图2(b)进行比较,可以发现,未经背景均衡,直接高通滤波的方法处理效果并不理想。若滤波阈值设置较低,则会遗留很多背景噪声;若滤波阈值设置较高,又会对弱目标轨迹造成较大破坏。在此情况下,需要一种有效的背景均衡处理手段,自动区别背景噪声与目标信号,滤除噪声,同时保护弱目标轨迹。
2 常用背景均衡方法
Struzinski W.A.和 Lowe E.D.研究了 S3PM(Split Three-Pass Mean)、排序截断平均(OTA:Order Truncate Average)等4种背景均衡算法,并比较了各种算法的性能[5]。Joo J.H.和 Jum B.D.在此基础上对 S3PM 和OTA算法进行了深入分析,并分别比较了窗长、门限等参数对这2种算法性能的影响[6]。Kuhn J.P.和Heath T.S.根据宽带干扰谱和窄带信号谱的自相关函数不同,将自适应背景均衡算法应用于浅海多途环境下的噪声均值估计,提高宽带干扰背景下窄带信号检测能力[7]。Stergiopoulos S.提出了一种新的波束噪声归一化方法,并分别对波束域和频域进行噪声均值估计,该方法基于背景噪声具有一定的指向性[8]。
综合而言,目前BTR中较为常用的背景均衡方法是OTA算法[9]和各种OTA改进算法。本小节将对2种OTA改进算法进行比较分析。
2.1 中值滤波OTA算法
文献[10]提出一种中值滤波OTA算法,把OTA算法和中值滤波相结合,对波束域中非均匀、非平稳的背景进行均衡处理。通过设置系数K调整窗口宽度,通过设置系数α调整滤波阈值。中值滤波在抑制随机起伏方面效果较好,阈值比较在去除大范围起伏方面效果较好,结合之后可以得到良好的均衡结果。
对图1进行中值滤波OTA算法处理可以得到如图4所示处理结果,处理中根据实际情况,K取值10,α取值1。

图4 中值滤波 OTA 算法处理结果Fig. 4 The result of median filtering OTA algorithm
图5是图4的峰值图(为显示明显,将非零点幅值调整为1)。

图5 图4 峰值图Fig. 5 The peak figure of Fig. 4
对比图5与图2(b)可以发现,该算法在过滤背景噪声的同时,使得250°~300°方位上的弱目标轨迹损失严重,强目标轨迹也偶有丢失,这对后续轨迹提取有不利影响。且该算法需要人工设置参数,不断进行尝试调整,不利于机器自动进行弱目标轨迹的提取。
2.2 自动加窗OTA算法
在常用的背景均衡算法中需要不断尝试确定窗长、门限等参数,这为在实际应用中增加了难度[11]。一旦参数设置不合适,将会大大影响背景均衡效果[12]。基于此,文献[13]提出一种自动加窗OTA算法,通过计算局部峰值与其相邻两谷值的间距,实现自动加窗;根据目标信号和背景噪声特点,设置缩放系数r,对窗口内的数据进行放缩:

其中,p为峰值, vL和 vR分别为与p左右相邻的谷值。
波束形成过程中,目标波束沿时间轴的切面形状基本对称[14],峰值与2个相邻谷值的差值基本相等,因此r接近于1;背景噪声在空间谱上表现随机,峰值与2个相邻谷值的差值通常相差较大,r往往远小于1。将窗口中的数据乘以系数r,目标信号幅度将基本保持不变,背景噪声幅度将会被抑制。
对图1进行自动加窗OTA算法处理,可以得到如图6所示处理结果。
图7为图6的峰值图(为显示明显,将非零点幅值调整为1)。

图6 自动加窗 OTA 算法处理结果Fig. 6 The result of automatic window OTA algorithm

图7 图6 峰值图Fig. 7 The peak figure of Fig. 6
对比图7与图2(b)可以发现,该算法能够较完整地保留弱目标轨迹,同时在一定程度上抑制背景噪声。但该算法对噪声仅是“抑制”,而非“滤除”。经算法处理之后,背景噪声幅度降低但仍然存在,不满足机器自动滤除噪声的需求,且由于背景噪声的空域随机性,该算法对背景噪声的抑制效果也具有一定的随机性。
3 自适应门限背景均衡方法
针对现有算法的不适用性,需要一种新的背景均衡方法,能够根据信号特点自动生成滤波门限,在尽量不破坏弱目标轨迹的前提下,对背景噪声进行过滤,以求得到纯净而完整的BTR峰值图。
针对以上需求,本文设计了一种自适应门限背景均衡算法(Adaptive Threshold Background Normalization,ATBN算法)。利用BTR图像中目标信号与背景噪声的不同特点,ATBN算法能够自适应生成滤波门限,抑制背景噪声、保护目标信号,在尽可能保护弱目标轨迹的情况下对背景噪声进行滤除。
3.1 算法原理
在声呐BTR图像的实际处理中,发现其具有以下特点:
1)随时间变化,目标信号在幅度和方位上具有一定的稳定性,其幅度维持在一定范围内,其方位保持不变或近似缓慢均匀变化。但随时间变化,背景噪声在幅度和方位上表现出很大的随机性。这为本算法的邻域相乘处理提供了依据。
通过相邻三帧数据相乘,目标处幅值接近于该目标平均幅值的三次方。而由于非平稳性和非均匀性,噪声处幅值将小于噪声平均幅值的三次方,从而达到抑制背景噪声、提高目标信号与背景噪声区分度的目的。
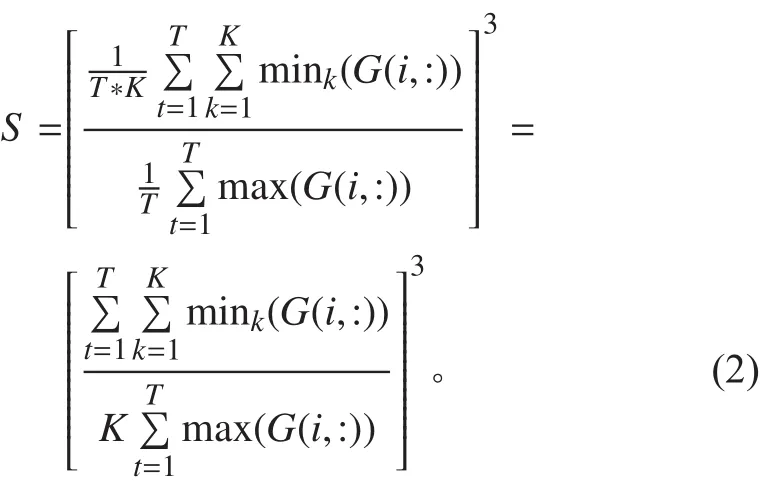
2)虽然在不同时刻,目标信号幅度和背景噪声幅度会有所变化,但目标信号最大幅度与噪声平均幅度的比值会保持在一定范围内。这为本算法的自适应门限设计提供了依据。
通过统计该段信号内每一时刻的目标信号最大幅值和背景噪声平均幅值,合理计算之后,可以求得一个合理门限。
3.2 算法设计
根据声呐BTR图像的具体特点,设计ATBN算法具体流程如下:
1)归一化处理
将原始的BTR图逐帧进行归一化处理,得到归一化后的BTR图(见图1)。
2)自适应求取过滤门限
3)邻域相乘
将归一化BTR图从第2行开始,将第i行与i-1行和i+1行相乘(),将得到的结果再次进行归一化处理后,作为新的第i行数据,直至倒数第2行结束,得到图8。
图8 再次归一化 BTR 图Fig. 8 The normalized BTR again
4)滤除噪声
利用自适应门限S对于图P3进行滤波,大于等于自适应门限S的值,调整为1;小于自适应门限S的值,则予以置零,得到图9。
5)求取峰值

图9 滤除噪声图Fig. 9 Reduce noise
将图9与归一化峰值图2进行同位置点相乘运算,得到最终所需的峰值图10。
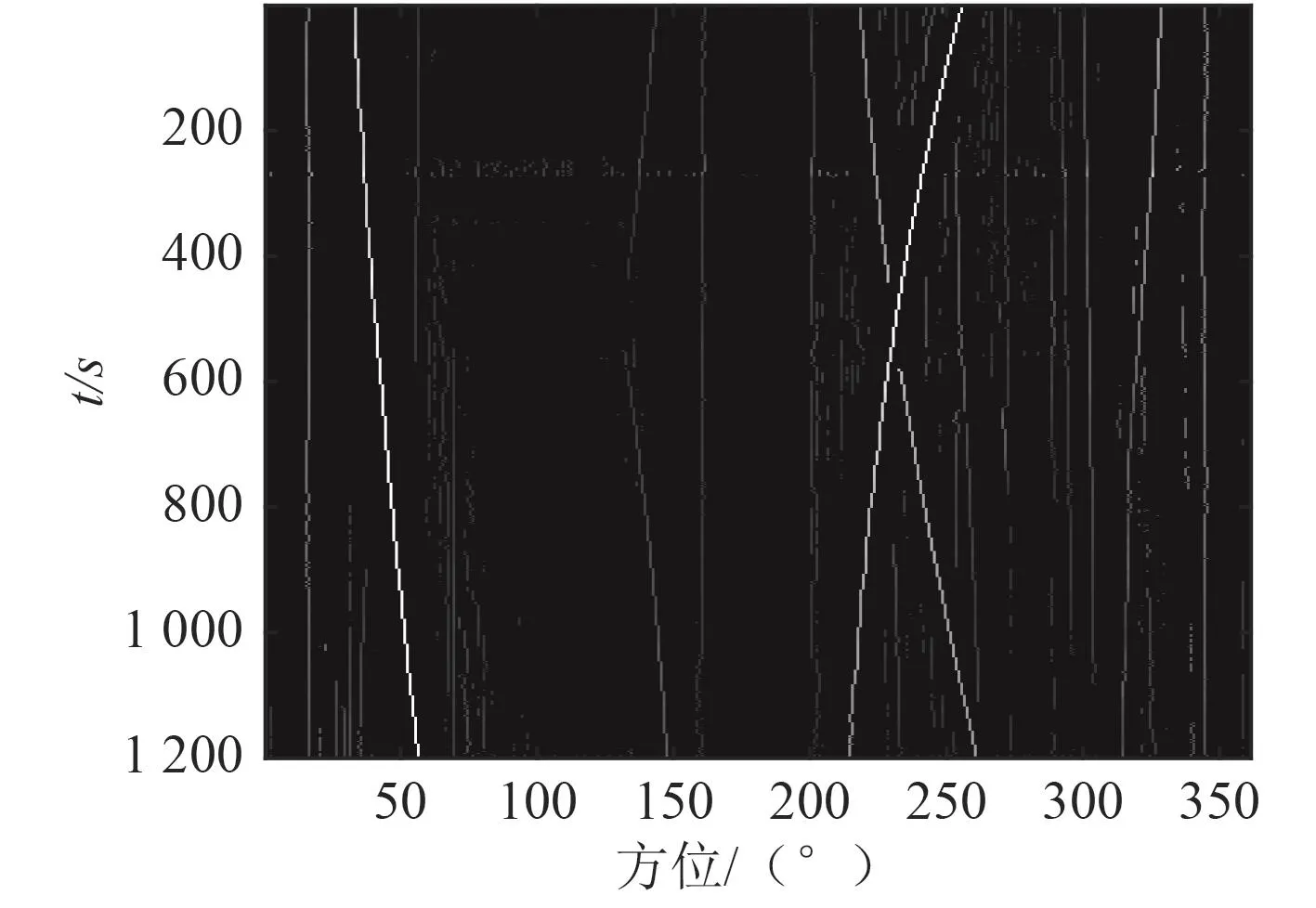
图10 最终峰值图Fig. 10 The final peak figure
3.3 算法处理效果
对图1进行ATBN算法处理可以得到如图11所示处理结果(为显示明显,将非零点幅值调整为1)。

图11 ATBN 算法处理结果Fig. 11 The result of ATBN algorithm
ATBN算法能够根据信号自适应地生成滤波门限,自动识别背景噪声并进行抑制,实现了在尽量减少弱目标轨迹损失的前提下,对背景噪声进行自动过滤的过程。
将图11与图5、图7比较可以发现,ATBN算法的处理结果更适合用于声呐NTR中机器自动提取弱目标轨迹。图11中,背景噪声基本被滤除干净,剩余噪声呈零散分布,易于后续的机器自动过滤;弱目标轨迹保存较为完整,大致上呈现出连续线状分布,易于后续的机器自动提取。
4 结 语
1)对于从多目标、强干扰的声呐BTR中提取弱目标轨迹,背景均衡处理具有重要作用;
2)针对机器自动提取BTR弱目标轨迹的需求,算法不仅需要实现自适应门限的功能,而且需要实现自动识别背景噪声予以抑制、自动识别目标信号予以放大或保护的功能,目前算法大多不能同时具备这2个功能;
3)本文提出的自适应门限背景均衡算法(ATBN)能够同时实现自适应门限设置与噪声抑制,对于从强干扰、多目标的BTR中提取弱目标轨迹有很大帮助。
