要地远程监控对传感器探测距离的需求
2019-07-12侯鑫汪洋
文/侯鑫 汪洋
当前,针对军政场所、重要经济或民生设施等要地发动的地面侵袭事件越发频繁,造成了严重的社会危害。地面远程监控系统主要部署地面监视雷达和光电设备用于掌握地面目标情况,为后续指挥决策和反制行动提供情报保障,因此,选择什么能力的传感器显得十分重要。本文将通过梳理典型地面侵袭样式、地面远程监控系统工作流程等,从而推导出对地面监视雷达、光电设备的探测距离需求。
1 典型地面侵袭样式
当前典型地面侵袭样式总结如表1所示。
2 传感器对地面人员/车辆的探测距离分析
2.1 典型武器有效射程
典型武器有效射程总结如表2所示。
2.2 人员/车辆典型行动剖面
结合上述典型地面侵袭样式和典型武器有效射程,从远程监控来看,大多数的行动剖面为人员/车辆由远至近运动,当到达某一点后开展相关行动,如图1所示。
2.3 传感器探测距离分析
2.3.1 对人员的探测、识别距离分析
由上述图、表可知:威胁人员距离要地最远达2500m,防御过程:发现-识别-决策-反制,因此:
(1)反制距离:应不小于2500m;
(2)传感器的发现、识别距离如下考虑:
一般地面远程监控系统采用雷达发现、引导光电跟踪和识别的方式:
1.地面监视雷达探测、建立航迹耗时T1:假设采取圆周扫描,扫描周期约10s,发现概率80%以上,一般发现3 点后建立航迹,从探测到目标至建立航迹耗时约50s;

表1:典型地面侵袭样式总结表
2.远程光电设备转动、跟踪、识别耗时T2:一般转动最大角速度约45°/s,最大转动角度180°,考虑电机加、减速耗时约2s,此时转动耗时约6s,转动后微调视场角、焦距及人员判别等耗时约10s,上述总耗时约16s;
3.上述过程中,人员反应、操作,数据传输时延等耗时T3 约6s;
4.假设人员短跑速度约8m/s(时速约28.8km/h)。
综上得出,光电识别距离应不小于约2650m,雷达探测距离应不小于约3100m。
2.3.2 对车辆的探测、识别距离分析
由上述图、表可知:威胁车辆距离要地最远达3725m,防御过程:发现-识别-决策-反制,因此:
(1)反制距离:应不小于3500m;
(2)传感器的发现、识别距离如下考虑:
一般地面远程监控系统采用雷达发现、引导光电跟踪和识别的方式:
1.地面监视雷达探测、建立航迹耗时T1:假设采取圆周扫描,扫描周期约10s,发现概率80%以上,一般发现3 点后建立航迹,从探测到目标至建立航迹耗时约50s;
2.远程光电设备转动、跟踪、识别耗时T2:一般转动最大角速度约45°/s,最大转动角度180°,考虑电机加、减速耗时约2s,此时转动耗时约6s,转动后微调视场角、焦距及人员判别等耗时约10s,上述总耗时约16s;
3.上述过程中,人员反应、操作,数据传输时延等耗时T3 约6s;
4.假设车辆快速行驶速度约41.7m/s(时速约150km/h)。
综上得出,光电识别距离应不小于约4500m,雷达探测距离应不小于约6700m。
2.3.3 总结
一般武装人员的雷达散射截面积假设为1m2,尺寸约1.7m×0.5m,中型车辆的雷达散射截面积假设为10m2,尺寸约2.3m×2.3m:
(1)由2.3.1 节可知,从战术使用来看,对人员的光电识别距离应不小于约2650m,雷达探测距离应不小于约3100m,可估算出对车辆的光电识别距离应不小于约6600m,雷达探测距离应不小于约5500m;
(2)由2.3.2 节可知,从战术使用来看,对车辆的光电识别距离应不小于约4500m,雷达探测距离应不小于约6700m,可估算出对人员的光电识别距离应不小于约1800m,雷达探测距离应不小于约3800m。
综上所述,传感器探测距离需求如表3所示。

表2:典型武器有效射程总结表
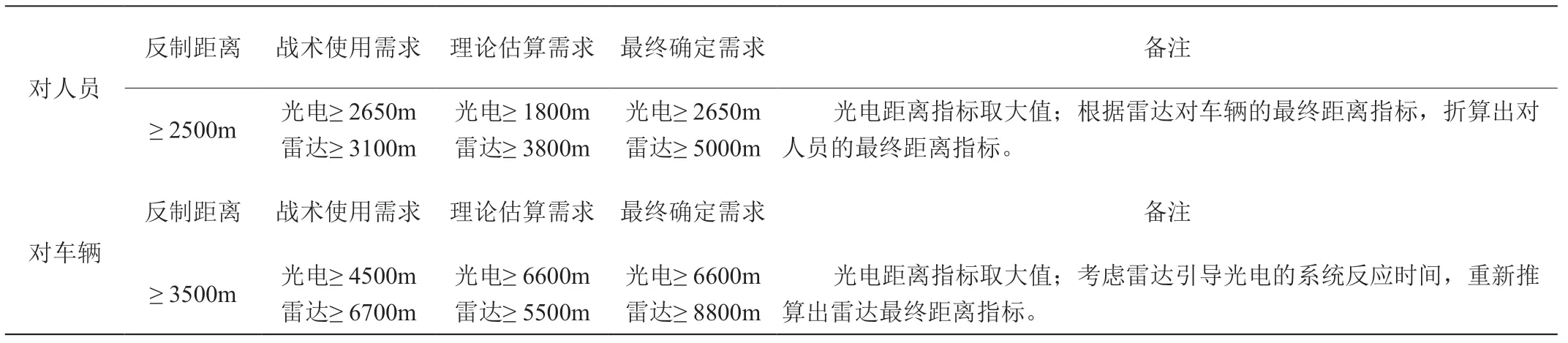
表3:传感器探测距离需求表

图1:地面人员/车辆行动剖面示意图
3 结束语
本文从战术使用和理论估算两个角度分析、推导了要地远程监控中地面监视雷达、光电设备对人员、车辆的探测距离需求。上述分析、推导过程可作为系统总体设计、传感器选型时的参考,也可作为陆地边境监控系统或海岸监控系统等领域系统设计时的参考。
