基于ATmega32A的刷卡型教育机器人研究与设计
2019-07-11谭瑶李兵兵
谭瑶 李兵兵

【摘 要】论文基于ATmega32A单片机设计了一种刷卡型教育机器人。采用自主设计的直流电机伺服控制系统硬件电路,可通过功能卡片和红外遥控器来控制马达速度、传感器触发值、声音、数值显示等,且可在机器人运行过程中实时修改,无需重新刷卡启动。本产品兼容Arduino平台,可对卡片进行开放式图形化编程,编写各种难度的程序,以適应不同年龄段的学生。
【Abstract】A card-swiping educational robot is designed based on ATmega32A. The hardware circuit of the system is controlled by adopting self-designed DC motor servo, and the motor speed, sensor trigger value, sound and numerical display can be controlled by function card and infrared remote controller. It can be modified in real time during the running process of the robot without re-swiping the card to start up. This product is compatible with Arduino platform. It can program cards openly and graphically, and write programs of various difficulties to suit students of different ages.
【关键词】ATmega32A;刷卡型教育机器人;图形化编程
【Keywords】ATmega32A; swiping educational robot; graphical programming
【中图分类号】TP277 【文献标志码】A 【文章编号】1673-1069(2019)05-0156-02
1 引言
机器人是一门交叉性极强的综合学科,它涉及机械制造、自动控制、传感器技术、计算机软硬件技术等多种技术[1]。随着机器人技术的不断发展,它在社会中的各方面都得到了广泛应用[2]。
教育机器人以教育为第一目的,它与其他类型的机器人区别很大,教育机器人的教育价值更为重要。所以,本文基于ATmega32A单片机设计了一种刷卡型教育机器人。
2 整体设计
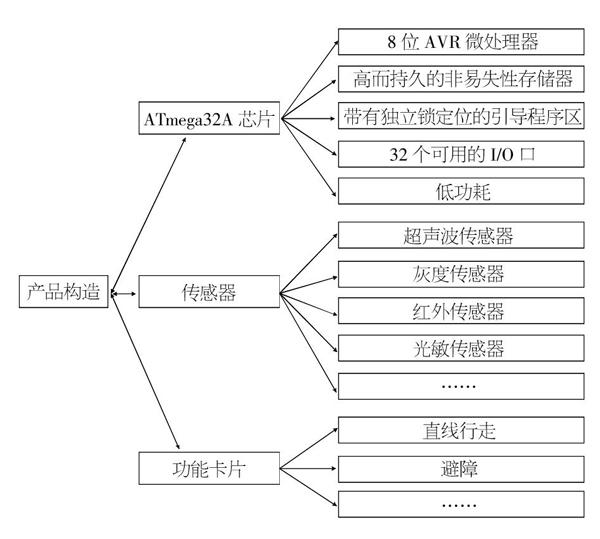
本文研究的刷卡型教育机器人由AVR 8位单片机、可识别条形码的传感器、直流伺服电机、带有条形码的功能卡片及多种可拼凑的塑料积木零件组成。目前已研发75张功能卡片,可通过刷卡使机器人执行多套动作。产品的构成如图1所示。
3 硬件设计
3.1 芯片PCB
本文研究的机器人以Atmel的单片机作为芯片,支持嵌套编程,兼容Arduino平台。ATmega32A是一种高性能、低功耗的8位AVR微处理器。它拥有以下优点:擦写寿命高,数据可长时间保存,可实现真正的“边写边读”;支持扩展的片内调试,可在线系统编程,便于功能卡片的设计,节约成本,提高产量;功耗低,正常模式是0.6mA,空闲模式是0.2mA,工作电压在2.7~5.5V。
3.2 控制系统
机器人采用自主设计的直流电机伺服来控制系统硬件电路。由于很多教育机器人的部件不是固定而是自主搭建的,所以控制系统尚存不足,因此,本产品采用直流伺服电机。伺服系统是自动控制领域中一种重要的控制系统,根据直流电机的数学模型和驱动原理,设计直流电机伺服控制系统的硬件电路,实现了机器人主控制器的良好控制。
3.3 传感器
本项目所研究的教育机器人中,传感器部分主要包括超声波传感器、声音传感器以及红外传感器等。通过传感器获取外界各种信息,配合执行多套动作。比如,通过超声波传感器可获取机器人与障碍物的距离信息,使得运用了超声波传感器的机器人规避障碍的精度远高于其他机器人。
4 软件设计
4.1 嵌入式软件
本设计支持刷卡及PC端两种编程方式。因此本产品用AVR微处理器作为芯片,进行嵌入式软件开发,通过将PC机拆分成各种微处理器,来实现一些特定的功能。在机器人芯片中烧录代码,然后赋予其某种特定功能,实现于PC机的对接。
4.2 可视化测试工具
本设计自主研发了一种图形化编程工具——BLFK001,这个软件上集成了大量的功能模块,并且还有一个可视化的指令接受界面和相应的代码,这样就非常便于人们进行差错检测。下图为BLFK001的编程界面。
5 结语
本文研究并设计的教育机器人可以帮助各年龄段的学生培养动手能力,将理论知识和实践能力结合起来,促进学生的全面发展。
【参考文献】
【1】蒋建武. 教育机器人基础开发平台设计[D].苏州:苏州大学,2005.
【2】(美)Saced B. Niku.机器人学导论:分析、系统及应用分析、系统及应用[M].北京:电子工业出版社,2004.
