基于观测器的不确定广义系统的时滞依赖无源控制
2019-07-11范桂英卢永红肖润梅
范桂英,卢永红,肖润梅
(山西大同大学数学与统计学院,山西大同037009)
无源性概念自引入以来,过去的几十年中许多学者对不确定性时滞系统的无源问题做了研究,时滞系统的研究已成为热点并且涌现出许多的研究成果[1-4]。文献[5]针对不确定广义系统研究了其时滞依赖鲁棒镇定问题,文献[6]针对线性系统研究了其基于观测器的时滞依赖无源控制问题,文献[7]针对时滞广义系统的研究了其基于观测器的时滞依赖无源控制,但对控制输入含有时滞同时参数也带有不确定性的广义系统,考虑其观测器设置的时滞依赖无源控制的研究并未见。
1 预备知识
给出如下的不确定时滞广义系统

其中u(t)∈Rn,x(t)∈Rn,z(t)∈Rn分别是控制输入、状态向量、被调输出,w(t)∈Rn是属于L2[0,∞)空间的干扰输入,A,A1,B,B1,C,C1,D,D1,C2分别是适当维数的常数矩阵, ,ΔA1,ΔB,ΔB1,ΔC,ΔC1,ΔD,ΔBw和ΔDw分别是不确定性参数且依次具有形式EiFi(t)Hi,其中Ei,Hi是已知的适当维数的常数矩阵。是lebesgue 可测的。时滞函数d(t)是时变时滞的并满足0 ≤d(t)<
定义1对于系统(1)的自治系统,如果存在一个非负定函数V(x(t)),一个正数η,使得无源不等式V̇(x(t))-2wT(t)z(t)+2ηwT(t)w(t)<0 对于任意的输人信号w(t)和所有容许的不确定性成立, 则称系统(1)的自治系统是无源的,当不等式严格成立时,系统称为严格无源的。
引理1(Schur 补) 对于给定的对称矩阵其中则以下三个条件是等价的
(I)S<0;
引理2对于任意正定对称矩阵M∈Rn×m,标量γ>0 向量函数ω[0γ]→Rn,则下式成立

考虑如下基于观测器的控制器

其中,ξ(t)∈Rn为状态x的估计;K∈Rn×q为观测增益矩阵。
令e(t)=x(t)-ξ(t),则由系统(1)与误差动态方程组成的增广闭环系统为
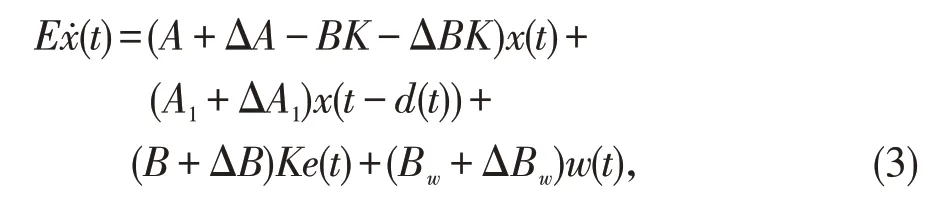
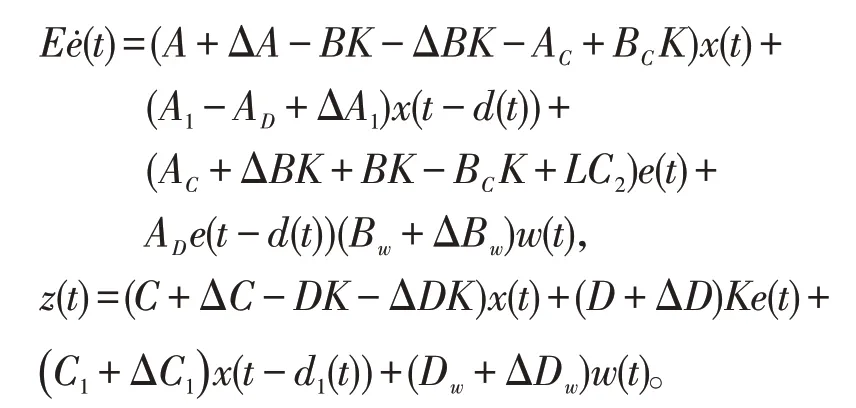
2 主要结论
定理1若存在可逆矩阵P1,P2,S1,S2,R1,R2,矩阵K,L使得满足

其中
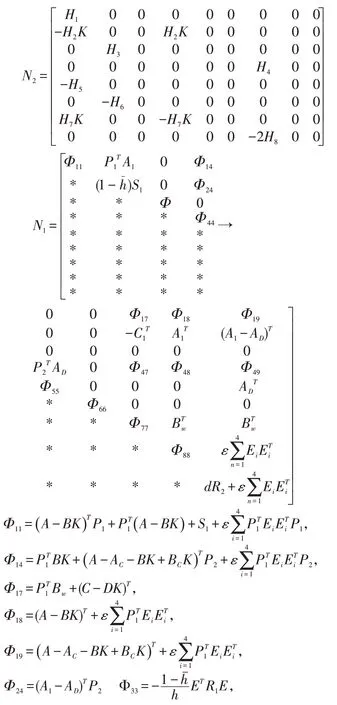

则闭环系统(3)是严格无源的。
证明首先构造Lyapunov函数为

则V(x(t),e(t))是正定的,函数V(x(t),e(t))对时间求导得

其中

由引理1 与引理2 可得,上式对所有允许的不确定性成立,当且仅当Ω<0,使得

成立,由定义1知系统(3)是严格无源的。证毕。
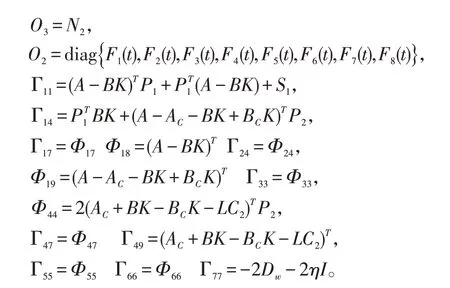
定理2若存在可逆矩阵P1,P2,S1,S2,R1,R2, 矩阵K,L使得满足

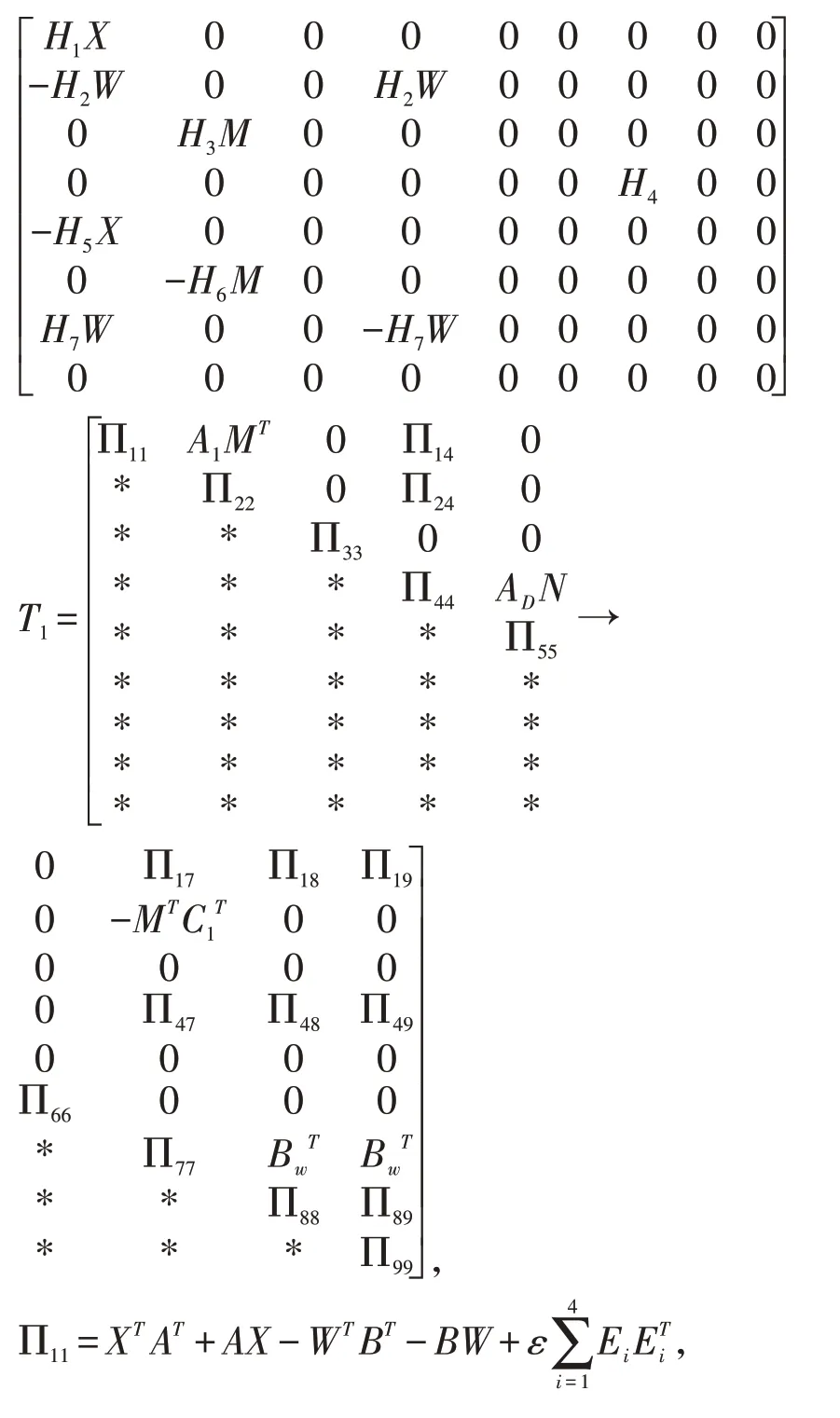
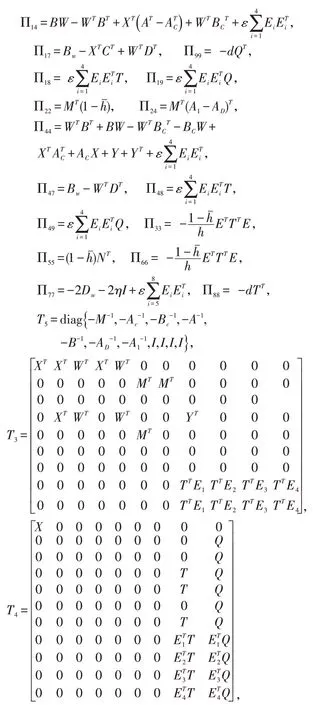
则闭环系统(3)是时滞依赖无源的,并得到控制器增益与观测器增益分别为

3 结语
主要针对不确定时滞广义系统,通过构造Lyapunov函数,由线性矩阵不等式的方法, 再利用引理得出系统时滞依赖无源的充分条件,同时给出了观测器的设计,也得出了控制器增益矩阵和观测器增益矩阵。
