滑模变结构在矿井监测机器人中的应用与研究
2019-07-11朱晓克
朱晓克
(抚顺矿务局职工工学院,辽宁 抚顺 113006)
瓦斯是井下采煤中出现的一种气体,它是成煤过程中植物产生的煤岩层气体。由于高温高压和地质变化的作用,碳产生的同时,大量的瓦斯随之产生。瓦斯的存在,严重威胁到井下作业人员的安全,对于瓦斯的监测就尤为重要。在一些小规模的矿井中,有专门的瓦斯监测人员,他们是分段监测,各负责本段内瓦斯的浓度、温度、湿度等,以及“一通三防”等设施的保养和运行情况。由于瓦斯监测人员一般先于采煤作业人员进入巷道,其携带瓦检仪、温度计、检查棍、胶皮管、记录表格等工具。但是不确定瓦斯浓度的情况下,监测机器人的出现极大的缓减了人员的劳动强度,降低了监测人员的安全风险[1-3]。
目前,监测机器人采用的是履带式隔爆型机器人,其特点是体积小,适应各种复杂的地形,能涉水,不受遥控距离的限制,通过传感器的采集记录信息,在采集一段距离的数据后及时返回,监测人员从数据记录器中得到巷道瓦斯浓度、温度和湿度等信息,方便监测人员采取相应的措施。由于地形的复杂程度不同,瓦斯通常吸附在煤层的断面或煤堆的缝隙里,监测机器人在行进的过程中必须贴着煤层断面,才能采集到准确的数据。或者出现无法逾越的地方,或行进道路比较蜿蜒曲折,这样机器人就无法进行正常工作。
本文采用滑模变结构中的幂次趋近律控制监测机器人的行进轨迹,以便能准确的采集到关键信息。当机器人在行进中出现卡滞,或无法逾越的地形时,滑模变结构就迫使其沿着设定的轨迹行进,也就是沿着巷道的边沿到达采煤的端面。滑模变结构是在20世纪70年代引入国内,我国学者高为炳对其进行了细化,列出了一般趋近律、等速趋近律、指数趋近律和幂次趋近律等四种趋近律。由于四种趋近律各有优缺点,所以应用到不同的控制系统中。由于监测机器人是一个典型的非线性系统,具有很多干扰和不确定性,而变结构是一种很好的解决非线性系统的方法,对于任何的干扰和不确定性都能很好的屏蔽,当机器人出现一些如卡滞或止步不前,变结构就迫使机器人行进在设定轨迹内,让机器人拜托困境,采集到有用的数据。
1 幂次趋近律
微分形式
把时间t进行剥离,则:

由于变结构中对系统轨迹到达滑模面的时间有特定的要求,所以
设定滑模面s(t ) =0,从而时间可以简化为

(1.4)中可以看出,时间t取决于k,α,这两个值都是常数,可以经过仿真选取最优的值。所以系统轨迹可以在有限的时间内到达滑模面,符合监测机器人的特点,具有较好的拟合性。
2 幂次趋近律应用于监测机器人仿真实例
监测机器人是搭载了履带地盘机构的机器人,采用防爆电池供电,这种电池采用高安全系数材料制造,有效遏制电池爆炸,并能持续供电。机器人的控制系统是一块单片机控制板,其固封在一个密闭的透明盒子内,与外界隔离,单片机控制板上有电源指示灯。选取履带机器人前端履带间的中轴坐标和与x轴夹角θ作为输入,两条履带的线速度和角速度为数学模型的参考输入,输出的坐标与履带间的中轴坐标点进行比较,使机器人保持一个平稳的运行状态。
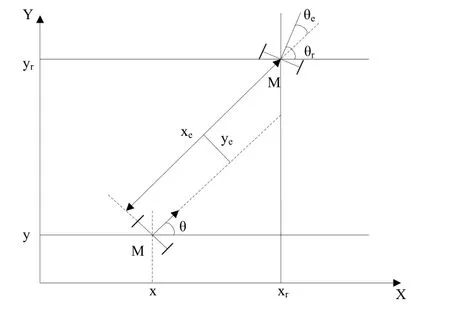
图1 履带机器人的位姿图
考虑一阶非线性微分方程设计监测机器人的运动学模型

其中v和w 为左右履带的线速度和角速度,引入坐标变换,得到监测机器人的位姿方程:

实际监测机器人行进轨迹是两条履带间坐标的变换轨迹,两条履带是由单片机控制下的两台直流电机驱动,如果两条履带的线速度相同,那么机器人一直向前行进;一条停止,另一条以相应的角速度转动,那么机器人就在转圈,从而机器人向左向右就可以实现。

仿真曲线如图所示:
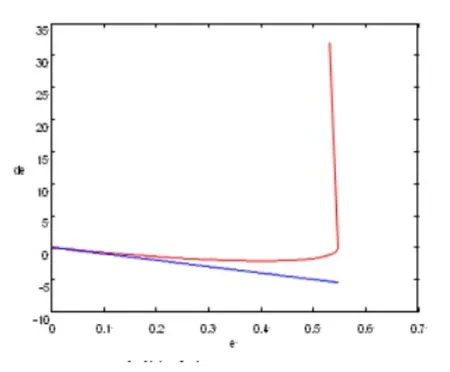
图2 跟踪曲线
从曲线来看,当监测机器人出现卡滞等情况时,变结构控制将根据两条履带的线速度和角速度作为控制的输入介入机器人的移动轨迹,图2可以看出介入是机器人抖振较大,不是来回穿越后停留在控制面上的,而是直接无限趋近后,停在控制面上。这样机器人系统有可能出现一小段的抖动后,趋于正常控制,输出曲线和趋近律引入前输出保持一致。
3 结论
近年来,对于矿井中瓦斯的控制与检测提出了很多的方法,但往往由于环境的影响和人为的因素使得瓦斯的监控还是使用原始的方法。
本文引入监测机器人配合监测人员工作,监测人员将机器人采集回来的数据作为参考,结合传统的监测办法进行实时数据汇总,极大的降低了监测人员的风险。
将变结构应用于监测机器人,这种控制方法在理论上是可行的,利用科学的方法监测出的数据是客观的,从图像上来看,这种方法可以使机器人在行进中不受影响,就可以不间断的记录实时数据。
