基于改进Vibe算法与多特征的智能交通系统
2019-07-08周森鹏穆平安张仁杰
周森鹏 穆平安 张仁杰
摘 要:基于计算机视觉技术对道路交通视频中的运动目标进行分类。针对目标分割过程中的光线变换及分类效率问题,主要采用贝叶斯网络模型以及合适的前景提取模型以提高精度。提出一种改进的Vibe算法对运动目标进行检测,通过提取目标长宽比、Hu不变矩以及离散度特征等对目标进行分类。最终实验结果正确率在80%以上,说明该智能交通系统可以有效识别出运动目标,且具有较强的鲁棒性与适应性。
关键词:计算机视觉;智能交通;改进Vibe算法;目标检测;目标分类
DOI:10. 11907/rjdk. 182552
中图分类号:TP303
文献标识码:A文章编号:1672-7800(2019)006-0018-03
Abstract:The purpose of this paper is to solve the problem of moving object classification in road traffic video which based on computer vision. Aiming at the problem of illumination change in target segmentation and efficiency of classification, this paper mainly uses Bayesian network model and appropriate foreground extraction model to improve the accuracy. First,an improved Vibe algorithm which can remove ghost is proposed to detect moving targets. The target is classified effectively by feature extraction of target aspect ratio ,Hu moment invariant, dispersion and the Bayesian classifier selection. The intelligent transportation system designed in this paper can effectively identify the target,which has strong robustness and adaptability. The accuracy of the experiment is above 80%. Using Bayesian network model can achieve high real-time performance and better accuracy.
Key Words: computer vision;intelligent traffic system;improved Vibe algorithm;object detection;target classification
0 引言
随着计算机视觉技术的发展,智能交通系统成为当前一项重要研究课题。智能交通系统的关键技术包括目标检测与目标分类,相比于传统交通系统,新一代智能交通系統对检测准确性与实时性的要求更高,以期实现对道路交通的无间断实时检测。
在目标检测方面,常见的用于提取运动目标的建模方法包括文献[1]与文献[2]所列出的方法。其中帧差法主要利用图像上相邻帧时间的差分,通过闭值化提取图像中的运动区域,该方法可以抑制光线变化,但缺点是容易形成空洞;高斯背景建模方法则是利用像素点的高斯模型进行检测,但计算量较大,不适用于高清相机的检测。
在目标分类方面,对于SVM分类算法[3],其核函数的选择缺乏普遍性;BP网络算法[4]则容易陷入局部最优,此类特征提取算法兼顾了运算速度,但识别率不高;文献[5]采用harr特征,该方法较为复杂,但具有较高的精确性,不会因为场景摇晃导致无法监测出目标的情况[6]。
本文主要采用融合帧差法的Vibe算法与贝叶斯分类方法,其目的是减少环境光线的影响并消除鬼影。为了兼顾算法的实时性与准确性,本文通过提取合理特征,利用贝叶斯网络模型[7]对道路交通中的行人及汽车进行分类。
1 智能交通系统设计方案
本文设计方案如下:将摄像机标定在路口视角中,当摄像头捕获图像数据后,首先使用中央处理单元对图像进行常规预处理,运用改进Vibe模型分割出运动目标对象,对检测到的目标提取Hu不变矩、长宽比、离散度等特征,并结合已建立好的贝叶斯网络分类得到分类后的数据,其算法流程如图1所示。
2 运动目标提取与形态学处理
2.1 标准Vibe背景建模算法
2.2 改进Vibe算法
传统Vibe算法虽然效果较好,但对于图像中快速运动的目标会产生鬼影,从而出现误提取目标的情况。本文融合帧差法对该问题进行改进,以提高检测准确率,具体步骤为:①首先初始化并建立背景模板以及前景维持矩阵[F(x,y)];②对视频序列作差分建模,并进行二值化处理;③运用前文方法,根据当前像素点R包含背景样本的个数是否在阈值范围内,判断该点属于背景还是前景。若判断为背景则执行步骤⑤,若判断为前景,则根据帧差法模型进一步判断当前模型是鬼影还是真实前景,跳转到步骤④;④根据差分掩摸图像继续判断当前点是鬼影还是前景,即将通过帧差法得到的背景图像与Vibe背景图像作与运算,得到新背景图像,若判断为前景,将维持矩阵[F(x,y)]对应点上的值加1,继续判断该点的维持矩阵是否超过一定阈值,若超过则认为是鬼影点;⑤根据传统Vibe算法的更新步骤更新背景模板。
2.3 移动目标形态学处理
(1)形态学操作。由于摄像机输出图像质量不高,因此作建模分析时会产生许多噪点。通过形态学操作,首先对背景图像进行二值化处理;然后通过合理设定形态学参数,除去噪声引起的白点,以提高算法在不同场景中的鲁棒性与适应性;最后求取背景图像上白色区域的轮廓外接矩形,采集移动目标样本。
(2)阴影部分去除。由于光线的照射,移动目标在地面上会产生投影,因此本文在进行Vibe模型处理时,通过阴影检测算法将阴影部分的值归类于背景模型值,从而有效提取出目标,所提取的目标值大小接近目标真实值。
3 目标特征提取与分类器设计
3.1 特征选取
特征提取是模型训练过程中最重要的一步,本文对提取的特征数据进行适当处理,以提升分类器性能。
(1)长宽比特征选取。所选特征1为长宽比特征,由于行人和汽车在尺寸上有着显著差异,因此可以用长宽比作为特征进行衡量。本文采用目标提取后的矩形框长宽比进行衡量。
(2)Hu不变矩特征。所选特征2为Hu矩特征[9],该方法于1962年提出,Hu矩特征主要用于表征图像几何特征,并且具有旋转平移不变的特点。本文通过计算选取公式(5)中N5个特征值作为网络输入。
4 实验仿真
4.1 测试数据集与识别率指标
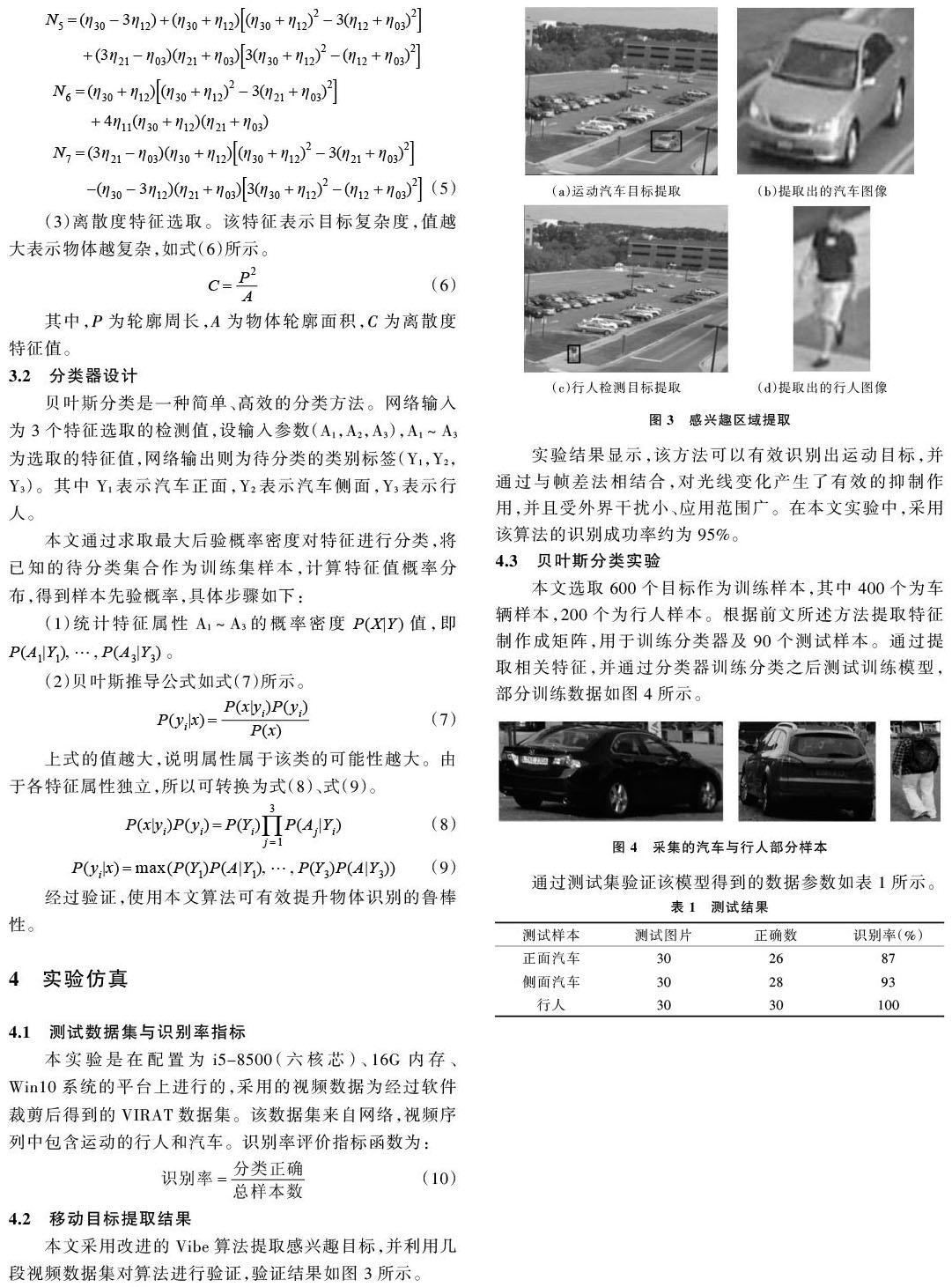
实验结果显示,该方法可以有效识别出运动目标,并通过与帧差法相结合,对光线变化产生了有效的抑制作用,并且受外界干扰小、应用范围广。在本文实验中,采用该算法的识别成功率约为95%。
4.3 贝叶斯分类实验
本文选取600个目标作为训练样本,其中400个为车辆样本,200个为行人样本。根据前文所述方法提取特征制作成矩阵,用于训练分类器及90个测试样本。通过提取相关特征,并通过分类器训练分类之后测试训练模型,部分训练数据如图4所示。
通过测试集验证该模型得到的数据参数如表1所示。
5 结语
为了实现对道路交通视频中运动目标的有效分类,本文首先采用改进Vibe算法识别移动目标,然后提取运动目标特征,并采用贝叶斯模型进行分类,从而能够准确识别出移动目标属性。该算法具有较高的鲁棒性与识别准确率,整体效果优于BP等算法,效率上优于harr特征分类方法。但是当镜头中存在遮挡现象时,会导致识别率降低。因此,在人群密度较大时,如何更有效地提取信息还需要作进一步研究。
参考文献:
[1] 唐佳林,李熙莹,罗东华,等. 一种基于帧差法的夜间车辆检测方法[J].计算机测量与控制,2008,40(12):1811-1813.
[2] 於正强,潘赟,宦若虹. 一种结合帧差法和混合高斯的运动检测算法[J]. 计算机应用与软件,2015(4):129-132,270.
[3] 胡宏宇. 混合交通中运动目标特征表达与分类算法的研究[D]. 长春:吉林大学,2007.
[4] 岳昊,邵春福,趙熠. 基于BP神经网络的行人和自行车交通识别方法[J]. 北京交通大学学报,2008,32(3):46-49.
[5] SISWANTORO J,PRABUWONO A S,ABDULLAH A,et al. Linear model based on Kalman fliter for improving neural network classification performance[J]. Expert Systems with Applications,2015,49(5):112 -122.
[6] DALAL N,TRIGGS B. Histograms of oriented gradients for human decetion[C]. Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2005:25-28.
[7] 黄影平. 贝叶斯网络发展及其应用综述[J]. 北京理工大学学报,2013(12):1211-1219.
[8] 蒋建国,王涛,齐美彬,等. 基于Vibe的车流量统计算法[J]. 电子测量与仪器学报,2012,26(6):558-563.
[9] 姚军,蒋晓瑜,黄应清. 目标识别中Hu矩、Zernike矩和小波矩的比较[J]. 装甲兵工程学院学报,2006,20(3):34-36.
[10] VIOLA P,JONES M,SNOW D. Detecting pedestrians using patterns of motion and apperance[J].International Journal of Computer Vision,2005,63(2):153-161.
[11] 焦波,李国辉,汪彦明,等. 一种基于形态学的运动车辆阴影消除方法[J]. 自动化学报,2008,34(7):838-840.
[12] CHOW T W S,RAHMAN M K M. A new image classification technique using tree-structured regional features[J]. Neurocomputing,2007,70: 1040-1050.
[13] COX I J,MILLER M L,MINKA T P. The Bayesian image re-trieval system:Pic Hunter:theory,implementation,and psychophysical experiments[J]. Institute of Electrical and Electronics Engineers Transaction on Image Procession,2000,9:20-37.
[14] LIU H,SUN J,LIU L,et al. Feature selection with dynamic mutual information[J]. Pattern Recognition,2009,42(7):1330-1339.
[15] ZHANG H, SHENG S. Learning weighted naive Bayes with accurate ranking[C]. 2004 Fourth IEEE International Conference on Data Mining(ICDM04),2004: 567-570.
[16] 杨阳,唐慧明. 基于视频的行人车辆检测与分类[J]. 计算机工程,2014,40(11):135 -138.
[17] 周志华. 机器学习[M]. 北京:清华大学出版社,2016.
[18] 胡学龙. 数字图像处理[M]. 北京:电子工业出版社,2014.
[19] 韩璞. 智能控制理论及应用[M]. 北京:中国电力出版社,2013.
[20] 卓金武. MATLAB数学建模方法与实践[M]. 北京:北京航空航天大学出版社,2011.
(责任编辑:黄 健)
