轮毂电机驱动电动汽车转向性能控制研究
2019-07-08郑寿森祁新梅付青梁涛
郑寿森 祁新梅 付青 梁涛

摘 要: 文中研究分布式后轮轮毂驱动电动汽车转向控制特性。首先建立驱动电机和车辆动力学模型,分析简化的动力学模型和非简化动力学模型在不同转角和速度时的输入输出特性。将整车动力学模型、两个轮毂电机的机电特性模型集成起来,形成两层三环节的控制。外层进行行驶速度反馈控制,内层进行两个电机转速的反馈控制,外层的总行驶速度经过速度分配,作为内层两个电机转速的输入分别控制两个驱动电机,车轮的转矩作为电机的负载转矩输入。最后对三种模型在两种转角变化工况下的动力学响应进行对比分析。
关键词: 轮毂电机; 电动汽车; PID控制; 直流电机; 电子差速; 转向控制
中图分类号: TN876?34 文献标识码: A 文章编号: 1004?373X(2019)13?0117?05
Research on steering performance control of electric vehicle driven by wheel hub motor
ZHENG Shousen, QI Xinmei, FU Qing, LIANG Tao
(Sun Yat?sen University, Zhuhai 519000, China)
Abstract: The steering control characteristic of electric vehicle driven by distributed wheel hub motor is studied. The driving motor and vehicle dynamics models are established, and the input and output characteristics of the simplified and normal dynamics models at different steering angles and speeds are analyzed. The overall vehicle dynamics model and the electromechanical model of two wheel hub motors are integrated to form the control mode with two layers and three links. The feedback control is performed for the driving speed in the outer layer, and for the rotating speed of two motors in the inner layer. The total driving speed of the outer layer is distributed as the inputs of two motors′ speeds to control two driving motors respectively, and the torque of the vehicle wheel is taken as the input of load torque. The contrastive analysis is carried out for the dynamics response of three models under varying conditions of two steering angles.
Keywords: wheel hub motor; electric vehicle; PID control; DC motor; electronic differential control; steering control
0 引 言
轮毂电机是将电动机和制动系统集成在车轮上进行直接驱动的装置,20世纪60年代后期应用于大型的矿用自卸车上。近几年,随着电动汽车的迅速发展,轮毂电机由于其控制灵活独立、可以分别控制和协调各轮的运动,开始用于电动汽车形成分布式驱动的电动汽车。这种驱动形式的电动汽车在结构上去掉了汽车底盘中的机械差速和随动系统等传动装置,大大简化了汽车的结构,降低了汽车的重量,是对传统的集中驱动汽车结构的较大革新,具有极大的应用潜力,成为新型电动汽车的研究热点。目前的研究主要有轮边电机驱动与轮毂电机驱动两种形式[1?2],轮毂电机驱动是将驱动电机直接安装在车轮中,不占用车身空间,对电机和轮毂的设计和电机的控制要求都较高。为提高汽车的操纵性能和稳定性,需要针对当前的行驶状态和驾驶员的驾驶指令,精确快速地控制每个轮的速度和扭矩,因此电机机电特性、硬件的响应速度、转向、加速、启动、刹车时的速度或者扭矩的分配[3?4],都是要实时监测或者协调控制的多个变量。目前成熟的技术主要用于低速缓慢的大型重载工程汽车和装甲车上,研发的热点和难点是将分布式轮毂驱动用于城市交通电动汽车上。文献[5]将BP神经网络用于转速分配及控制,可用于和学习样本类似的车辆情况和路况。文献[6]根据横摆角速度、横向加速度与参照速度的误差值和后续的PI控制环节进行转矩分配。文献[7]根据横摆角速度、质心侧偏角与参考值间的差值,采用滑模控制来计算所需要的总横摆力矩,优化分配各个轮胎受力。目前的研究基本是在特定的车辆实例中针对某一个目标,例如滑移率[8]、侧向力[8]、横摆角速度等,进行转矩分配或者转速分配来提高车辆操纵性和稳定性,控制效果满意。但控制模型及控制参数的调整,动力学特性和动力学参数,包括电机的参数和选择千差万别,没有通用的参照可以使用,而且很多研究只考虑车辆的动力学,忽略电机本身的动力学特性和车辆动力学特性的耦合,把驱动电机看作是一个理想的完美驱动单元[9]。 本文在前期轮毂电机驱动研究的基础上[10?12],首先分析整车动力学模型,在整車动力学模型上增加了直流电机驱动模型,把驱动电机机电特性和车辆动力学模型集成起来,针对后轮轮毂电机驱动的特定车辆,在特定行驶速度下仿真分析转向情况下的稳定性控制特性。
1 轮毂驱动电机及整车动力学模型
电动汽车的可靠行驶和操控要求轮毂电机具有宽的调速范围、足够大的启动转矩、体积小、重量轻,制动性能好,且具有能量回馈的特性。本文主要研究直流电机作为后轮驱动,直流电机产生的电磁转矩带动车轮旋转,同时克服由于摩擦产生的阻力和负载转矩。对电机而言,车轮和地面的摩擦力形成的转矩为负载转矩,对车辆来说,这个与轮胎变形相关的摩擦力就是车轮前进的驱动力,机电耦合的电磁转矩方程、直流电机的电枢回路电压平衡方程(电方程)如式(1)~式(3)所示:
当车轮侧偏角较小时轮胎侧偏特性处于线性区,车轮受到的垂直方向的力一定时,侧向力[Fyi]与侧偏角成正比[14],比例系数[Cy]为车轮的侧偏刚度,本文取轮胎摩擦公式的线性段的斜率值。
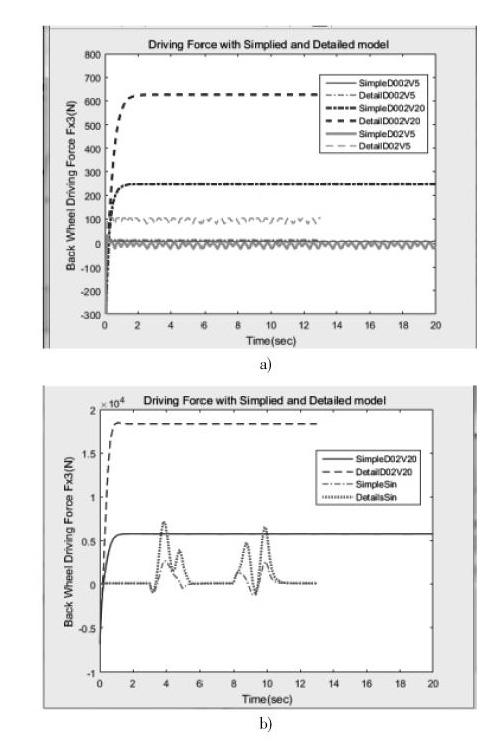
一般文献进行计算分析时,为了降低计算难度,通常忽略横向加速度和纵向加速度的耦合作用。从公式本身来看,如果转角和线速度都比较小时,简化模型可以近似反映运动情况,引起的误差比较小,但是当转角或者速度较大时,简化模型就会产生较大的误差。如果忽略这种耦合,对直线行驶没有什么影响,但在有转弯的状况下,转角越大速度越大,误差越大。分别对转角为0.2 rad和0.02 rad,车辆质心线速度为5 m/s和20 m/s形成的四种行驶状况,以及双移线行驶状况共五种状态定量分析简化模型和非简化模型的动力学特性,求解结果前三种工况组合下左后轮的纵向驱动力[Fx3],如图1所示。
图1 两种模型的后轮纵向驱动力比较
由图1可以看出,当转角很小[δ=]0.02 rad,行驶速度很小[v=]5 m/s时,两种模型的纵向驱动力差别很小,简化模型作为力学模型引起的误差很小,可以忽略。当速度增加到20 m/s时,简化模型的纵向驱动力为200 N以上(SimpleD002V20),而非简化模型的纵向力需要600 N以上(DetailD002V20),增加了2倍,转向和纵向运动的耦合不容忽视。继续观察[δ=]0.2 rad时,[v=]5 m/s和[v=]20 m/s时的曲线(SimpleD02V20和DetailD02V20,SimpleD02V5和DetailD02V5),可以看出随着转角[δ]和速度[v]的增加,简化模型和详细模型中纵向驱动力的差别也会增大;图1b)的双移线运动状况是速度不变、转角进行两个周期的正弦变化时的纵向驱动力结果,可以看出,纵向驱动力的差别也是随着转角的增大而增大。模型的横向驱动力和侧偏角也是随着转角和速度的增大而增大(图略)。
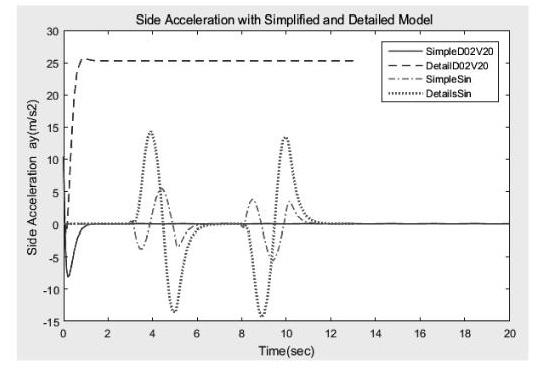
图2为侧向加速度的比较,可以看出,行驶速度较大时,两种模型的横向加速度是有一定的相位差的,即在正弦变化的转角输入中,两种模型达到最大横向加速度的时间不同。由此可见,在转角较大、速度较大时,简化模型已经不能准确及时地反映行驶的动力学特性,因此本研究在后续的控制模型中采用反映横向运动和横摆角速度耦合的详细模型。整体动力学及控制模型如图3所示,图中整车动力学模型封装为子模型。
图2 两种模型的横向加速度比较
2 不同控制模型的转向控制分析
在详细动力学模型中,给总体行驶速度加上速度反馈及PI控制,形成第一层外环的速度控制,再把两个驱动电机及其控制模型集成到整个模型的车轮部分中,把后轮3和后轮4的车轮速度和车轮负载分别作为两个驱动电机模型的输入,根据设定的速度和转角,采用Ackermann模型进行两个后轮的速度分配,形成两个驱动电机的速度参考,每个电机的轮速反馈和PI控制形成第二层内环的两个控制环节,形成后轮轮毂驱动的整体电动汽车控制模型。车辆的主要参数及根据车辆要求设计的直流电机主要参数为:[M=]1 500;[A=]1.6;[B=]1.4;[W=]1.6;[J=]3 375;[R=]0.3;[Ke=]4.5;[Kt=]43;[La=]0.012;[Ra=]1.2;[Bm=]0.005,控制参数根据模型进行整定和优化。
仿真分析中对三种控制模型进行对比:第一种是没有速度反馈的原始模型;第二种是只加一层速度反馈而没有集成两个驱动电机模型,把驱动电机作为一个理想的驱动单元;第三种则是本文具有两层反馈三个控制环节的模型(见图3)。在后续的仿真分析对比中,第二种只有一层PID控制的数据标记为with PID,第三种集成车辆模型和电机模型的数据标记为with PID and Motor,剩下的数据为没有速度反馈环节的第一种原始模型。仿真分析中的汽车稳定性系数[Kus]由回归得出,侧向刚度和纵向刚度取轮胎魔术公式中的斜率部分,路况为干性平坦路面。
图3 整车动力学及后轮驱动电机两层三环节控制模型
本文主要分析转弯时的控制,工况为行驶速度恒定下的两次变道双移线,速度设为[v=]20 m/s=72 km/h。转角变化分析两种情况:第一种是转角突然阶跃变化左?右?直?右?左,实现两次变道;第二種是把阶跃变换调整为相同频率的正弦变化,峰值为7°,频率为0.5,两个正弦波之间隔1.5个周期,即直行1.5个周期,两种输入状态下的转角如图4所示。
图5和图6分别显示两种输入模式下三种模型的后轮驱动力和横向加速度曲线对比。可以看出,对于表示突然转向的阶跃输入,会引起加速度响应的突然变化,驱动力变化曲线不平稳,有突然变化的尖角,导致侧向不稳定;调整成为正弦变化双移线后消除了曲线尖角,驱动力曲线平缓很多,幅值也有较大程度的下降,车辆的稳定程度有明显的提高,这和一般的驾驶体验相符,说明控制模型能正确模拟实际的状况。第三种模型和第一种模型的侧向加速度幅值比第二种模型小点,但是第一种模型因为没有反馈环节,因而无法跟踪参照速度,导致纵向速度略微降低,稳态误差加大,即牺牲一部分纵向速度,达到减少侧向加速度的目的。综合比较,第三种模型纵向速度始终跟随参照速度,同时侧向加速度也比其他模型小,因此转向稳定性较好。
图4 转角输入阶跃变化和调整后的正弦变化
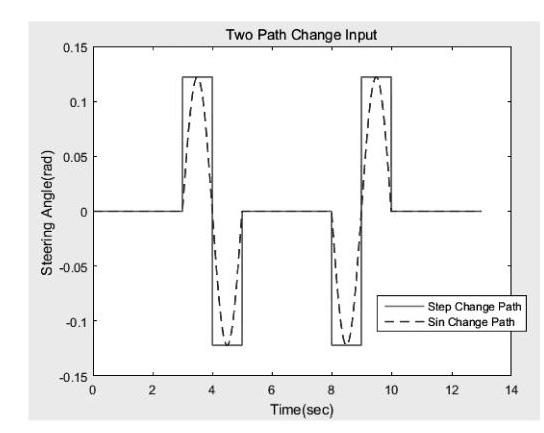
图5 转角阶跃和正弦响应的后轮驱动力
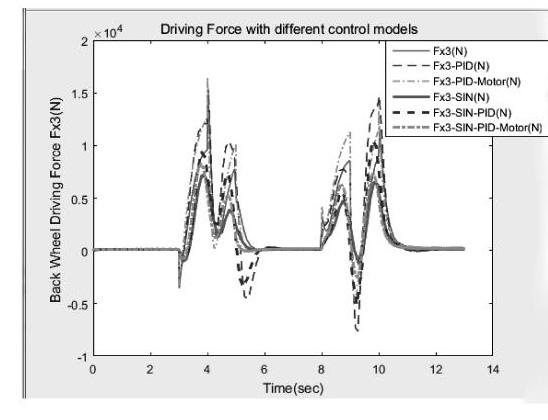
图6 转角阶跃和正弦响应的侧向加速度
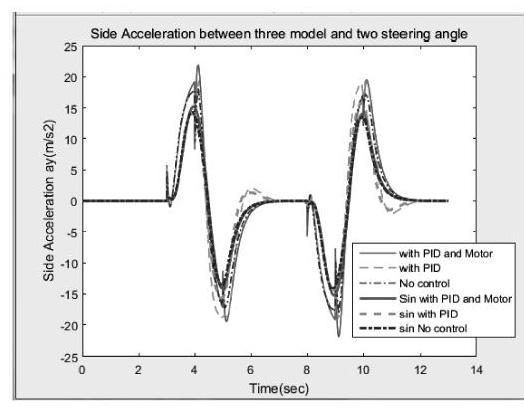
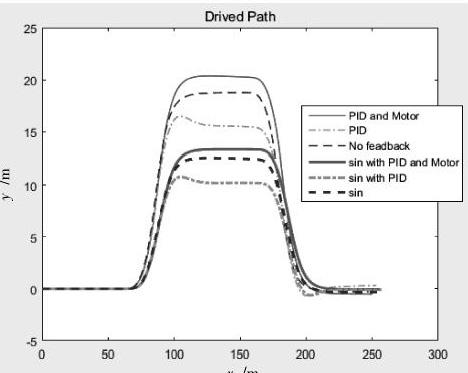
圖7显示了三种模型两种输入的双移线轨迹。首先比较正弦调整的转角输入和阶跃变化工况,由于正弦转角变化相对减缓且数值偏小,导致横向加速度变小进而横向速度变小,因而[y]方向的位移相应减少;对于有PID和电机模型的两层三控制环节模型,由于行驶速度和单个轮速的及时反馈和补偿,纵向速度和横向速度都能跟踪参照速度,不足转向和过度转向能够得到及时控制,因而[y]方向的位移是三个模型中最大的,也就是说,达到相同的[y]方向位移的参照速度可以降低;对于只有外层控制环节的第二种模型, 由于不能及时调整两个轮子的速度,同样输入情况下会出现过度转向或转向不足的情况。
图7 转角阶跃和正弦响应的行驶轨迹
3 结 语
本文建立并集成了驱动电机模型和整车动力学模型,形成后轮驱动整车控制模型。考虑通常的忽略横向加速度和纵向加速度的耦合作用,量化分析简化模型和非简化模型在不同转角和速度时的输入输出特性,认为在转角和速度较大时,简化模型不能准确及时地进行动力学控制,因此本文采用反映横向运动和纵向运动耦合的详细模型。在控制框架中,轮速和与轮速相关的负载转矩作为机电模型的输入,外层进行总行驶速度反馈控制,内层进行两个电机转速的反馈控制,形成一个两层三环节的控制模型,外层的总行驶速度经过内外轮的速度分配即电子差速,作为内层两个电机转速的输入分别控制两个驱动电机。最后对三种模型在两种转角变化工况下的动力学响应进行对比分析,验证了该控制方法可以达到预期的效果。
注:本文通讯作者为祁新梅。
参考文献
[1] 李以农,杨阳.电动汽车底盘一体化控制技术的发展趋势与展望[J].世界科技研究与发展,2016,38(3):481?491.
LI Yinong, YANG Yang. Status and tendency of integrated chassis control technology for electric vehicle [J]. World sci?tech R&D, 2016, 38(3): 481?491.
[2] 杨世春.电动汽车设计基础[M].北京:国防工业出版社,2013:24?25.
YANG Shichun. Foundation of electric vehicle design [M]. Beijing: National Defence Industry Press, 2013: 24?25.
[3] 徐寅,陈东.电动汽车差速系统研究综述[J].中国机械工程,2011,22(4):498?503.
XU Yin, CHEN Dong. Summary on research of differential for an electric vehicle [J]. China mechanical engineering, 2011, 22(4): 498?503.
[4] 袁仪,陈世元,刘耀阁.电动汽车电子转弯差速的解决方案综述[J].上海汽车,2009(3):2?5.
YUAN Yi, CHEN Shiyuan, LIU Yaoge. A summarize of solution on the differential problem of EV during turning [J]. Shanghai auto, 2009(3): 2?5
[5] 唐文武,陈世元,郭建龙.基于BP神经网络的电动车电子差速器设计[J].汽车工程,2007,29(5):437?440.
TANG Wenwu, CHEN Shiyuan, GUO Jianlong. Design of electronic differential for electric vehicle based on BP neural network [J]. Automotive engineering, 2007, 29(5): 437?440.
[6] OSBORNA R, SHIMB T. Independent control of all?wheel?drive torque distribution [J]. Vehicle system dynamics, 2006, 44(7): 529?546.
[7] 余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报,2008,36(8):1115?1119.
YU Zhuoping, JIANG Wei, ZHANG Lijun. Torque distribution control for four wheel in?wheel?motor Electric vehicle [J]. Journal of Tongji University (Natural science), 2008, 36(8): 1115?1119.
[8] 葛英辉,倪光正.新的轮式驱动电动车电子差速控制算法的研究[J].汽车工程,2005,27(3):340?343.
GE Yinghui, NI Guangzheng. A novel electronic differential algorithm for in?wheel motor driven EV [J]. Automotive engineering, 2005, 27(3): 340?343.
[9] KAROGAL I, AYALEW B. Independent torque distribution strategies for vehicle stability control [R]. Detroit: Sae World Congress & Exhibition, 2009.
[10] 史秀梅,郑寿森,祁新梅,等.三相开关磁阻电动机电磁场有限元分析[J].微特电机,2009(12):35?37.
SHI Xiumei, ZHENG Shousen, QI Xinmei, et al. Finite element analysis of magnetic field for three phase switched reluctance motors [J]. Small & special electrical machines, 2009(12): 35?37.
[11] 熊俊峰,郑寿森,祁新梅,等.电动汽车开关磁阻电机驱动电源的设计与研究[J].电力电子技术,2009(7):42?44.
XIONG Junfeng, ZHENG Shousen, QI Xinmei, et al. Design and research of SRM drive power supply for electric vehicles [J]. Power electronics, 2009(7): 42?44.
[12] 史秀梅,郑寿森,祁新梅,等.电动汽车用开关磁阻电机有限元分析及仿真[J].系统仿真学报,2011,23(7):1374?1377.
SHI Xiumei, ZHENG Shousen, QI Xinmei, et al. Research on finite element analysis and dynamical simulation of switched reluctance motor for EV [J]. Journal of system simulation, 2011, 23(7): 1374?1377.
[13] 王强,王耘,宋小文.基于差动驱动的电子差速控制方法研究[J].机电工程,2011,28(6):698?703.
WANG Qiang, WANG Yun, SONG Xiaowen. Investigation into electronic differential strategies based on differential driving [J]. Journal of mechanical & electrical engineering, 2011, 28(6): 698?703.
[14] 韦竞秋.汽车工程应用力学[M].北京:机械工业出版社,2013:17?18.
WEI Jingqiu. Applied mechanics of automotive engineering [M]. Beijing: Mechanical Industry Press, 2013: 17?18.
[15] 余卓平,赵治国,陈慧.主动前轮转向对车辆操纵稳定性能的影响[J].中国机械工程,2005,16(7):652?657.
YU Zhuoping, ZHAO Zhiguo, CHEN Hui. Influences of active front wheel steering on vehicle maneuver and stability performance [J]. China mechanical engineering, 2005, 16(7): 652?657.
