水声被动测距技术及误差分析*
2019-07-08孔大伟蔡昱明
孔大伟 蔡昱明
(1.海军士官学校 蚌埠 233012)(2.92730部队 三亚 572016)
1 引言
水下航行的潜艇,为保证自身的隐蔽性,一般情况下不用主动声纳,声纳长时间处于被动工作状态。然而一般被动声纳并不具备目标测距功能,因而利用被动声纳进行测距一直是水声技术中的重点课题。20世纪七十年代国外开始研制被动测距声纳并装备潜艇,这种声纳除可测定有源目标方位外,还可测定其距离,从而为潜艇的隐蔽活动创造了有利的条件。被动测距声纳的出现是水声技术的一大突破,但由于受平台尺寸和技术条件的限制,其应用范围仅限于大尺寸基阵,测距精度也不高。本文从理论角度分析被动测距的原理和形成误差的原因。
被动测距方法分为方位法和时差法,其共同点是利用间距相当长的多个、两个或三个子阵。
2 方位法测距
方位法测距原理如图1所示。
A、B为两个方向性子阵,相距为D。利用两个子阵分别测出两个方位角α、β。由正弦定理可知有:

其中,r1、r2为目标S与两个子阵声中心的距离。因此可由α、β、D求出r1、r2,从而求得目标距离为

这一方法在远场平面波假设条件下利用各子阵测目标方位角,亦即要求子阵的尺寸小于r1、r2。此外D应足够大,否则α与β的差别太小,误差加大。一般来说,这一方法测距误差较大,因而被另一方法“时差法”所取代。

图1 方位法被动测距原理
3 时差法测距
时差法一般利用三个子阵,其机理是测量波阵面的曲率。此时假定目标是点源,声波按柱面波或球面波方式传播。如图2所示。设在直线上布放三个等间距的阵元或三个子阵,间距为d。要测量的是点声源目标M与中心阵元B的距离与方位角α。
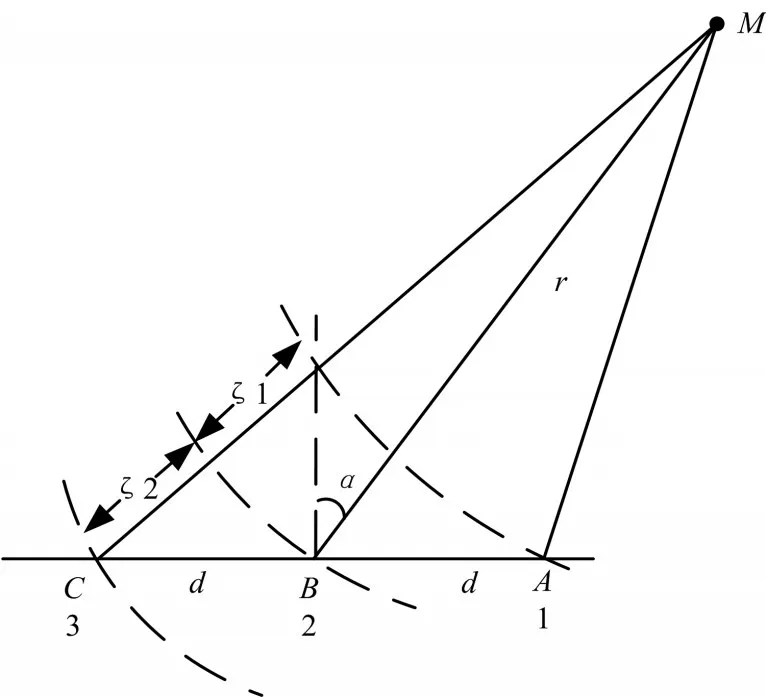
图2 三元阵被动测距几何关系
点源发出的声波到达阵元A、B、C的声程差ξ1、ξ2为

综合可得
注意到ξ1=cτ12,ξ2=cτ23,而τ12、τ23为与程差ξ1、ξ2对应的时差,于是上式成为

由此得到目标距离r为

其中τd=τ23-τ12为两个时差之差。因此,在已知阵元(或子阵声学中心)间距d、声速c时,测得ξ12、ξ23及角度α便可求出目标距离r。
α的测量则可利用远场平面波近似,因此有

4 时差法测距误差分析
本文从测距公式出发,研究随机因素引起的误差、系统误差及修正方法。
4.1 随机误差
假定各阵元布在一直线上,将
求全微分后得到测距相对误差

若各项误差彼此独立,则相对均方根误差为

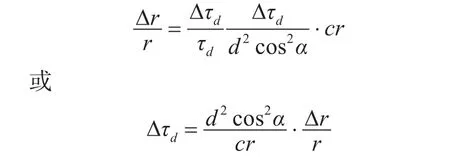
这里Δα以弧度计。上式中第一项为阵元(或子阵)间距d的测量误差,当d达到几十米时,这项误差可做到小于0.1%。第二项为角度(或方位角)测量误差引起的相对距离测量误差。当α≤45°时,若Δα=0.2°,这一误差小于0.7%,但当α很大,接近90°时,tanα急剧增大,因而这项误差很大,所以目前被动测距声纳只在α=±60°以内测距。第三项Δc/c为声速测量误差,通常可使其达到0.1%,因而影响不大。式中第四项Δτd/τd为时差之差测量误差,它与目标距离r有关;r越大,波阵面曲率半径越大,τd=τ23-τ12越小。从本质上说,这是因为此时柱面波的条件已不满足。由此可知,被动测距不可能在远距离上进行,亦即远距离测距是不利的。
为说明Δτd的影响,单独考虑Δτd造成的误差。
由上式得
4.2 系统误差
现在分析一下系统误差对测距的影响。基阵安装误差会造成很大的测距误差,这是因为三个阵元或子阵不可能安装成一个绝对的直线,总是有偏离,它们之间的间距也不可能绝对相等,因此必须进行修正,以减小测距误差。
当三个阵元在一个直线上,但阵元位置有偏离时,则如图3所示。

图3 三元阵共一直线,阵元位置有偏差时的阵元配置
中间阵元不在1、3阵元连线的中心位置,而是偏离中心Δd。此时在计算距离时,如仍以1、3阵元连线中点为0点,则带来的测时误差为
由图3可知,实测的τl2减小了Δτ,而τ23增大了Δτ,所以


可见只要安装误差为2mm就会带来很大测距误差。
当三个阵元不成直线时,考虑中间阵元在xoy平面内有一偏离,其坐标为B(x,y)。这里没有考虑垂直位置的偏离,因它不会引起程差的变化,如图4所示。

图4 三阵元不在一直线上,中间阵元有偏离时阵元配置
B点与o点(2号阵元)的程差为

实际上各接收器之间的程差测量值为ξ′12、ξ′23,因而

所以

设舰艇首尾线在x轴上,中间阵元位于点(x,y,z)。为简化分析,设声源与基阵在同一深度,如图5所示。
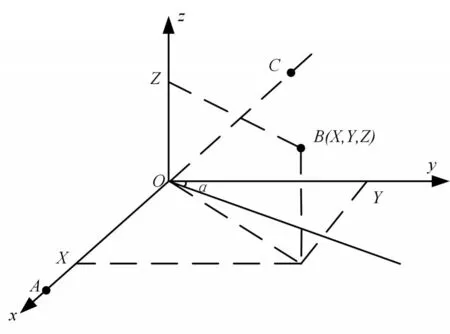
图5 阵元有偏离时的阵几何
在xoy平面内,声线与y轴夹角为α。
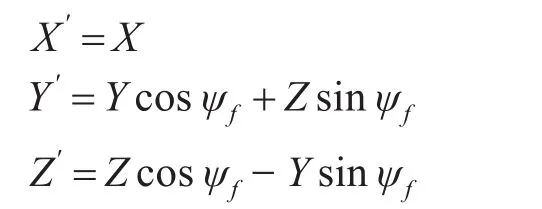
先考虑舰艇有横摇的情况。舰艇的横摇意味着基阵架绕x轴旋转ψf角(向右为正)。设地球坐标系为x′y′z′,阵元相对于地球坐标系的位置坐标如图6所示。

图6
再考虑舰艇有纵倾的情况。此时基阵架绕y′轴转ψz(向上为正)。再设地球坐标系为x″y″z″一中间阵元B在此坐标系的位置如图7所示。
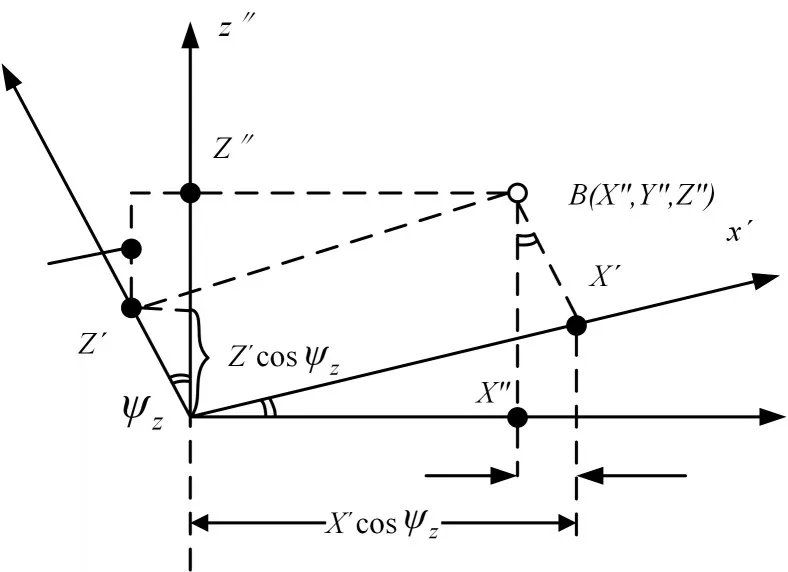
图7

这样可得到舰艇有纵横摇时,中间阵元在地球坐标系x″y″z″的位置为

中间阵元的位置变化将会带来附加的测距误差。由于舰艇摇摆,中间阵元所造成的附加程差为

实际进行测距计算时,必须按测得的横摇角ψf和纵倾角ψz,利用上式对每一方位角α进行修正。
5 结语
综上所述,分析可得,安装误差对测距误差影响非常大。
第一,安装误差对测距误差的影响随方位角α的增大而减小。我们知道,当tanα=X/Y时,Δξ很大。特别当X=Y,α=45°时,Δξ最大。然而并不是在45°时,安装误差对r计算引起的误差最大。这是因为随着α的增大,实际测得的τd=τ′23-τ′12减小,致使安装误差造成的Δξ对距离计算的贡献增大。
第二,安装误差对远距离测距的影响比近距离大。这是因为远距离声波接近平面波,τd会很小。而当目标方位角α一定时,安装误差引起的Δξ不变,因而它对距离计算的影响相对增大,从而使测距误差增大。因此,大目标方位角和远距离测距是被动测距的最不利状态。
第三,考虑舰艇摇摆的影响。若三个阵元不在一直线上,舰艇又有纵横摇,将会使测距误差进一步增大。若X=Y=Z=0,即无安装误差时,则Δξ=0,舰艇摇摆不产生附加误差。若ψf=0,ψz=0,则Δξ=Xsinα+Ycosα,即为仅有安装误差的情况。若既有ψf≠0,ψz≠0,且X、Y、Z≠0,由安装误差引起的测距误差则进一步扩大。
