基于改进动态逆方法的非定常气动力下过失速机动控制律设计
2019-07-03吕永玺章卫国史静平屈晓波陈华坤
吕永玺, 章卫国, 史静平, 屈晓波, 陈华坤
(西北工业大学 自动化学院, 陕西 西安 710072)
随着航空技术的发展,先进战斗机的研发已成为各个军事强国的必争领域,美国的F22、中国的歼20都是其中的佼佼者。先进战斗机不仅具有超强的隐身性能,同时也配备先进的航电设备和远距攻击武器。但是先进的气动布局和推力矢量的装备,也给先进战斗机飞行控制带来了诸多挑战,在先进战斗机超强机动性能的需求下,过失速机动时气动建模和大迎角控制便是最大的挑战[1]。在过失速机动控制时,建立准确的非定常气动力模型是首要解决的问题;如何消除非定常气动力带来的控制误差和控制时滞,提出工程实际中易实现的控制方法是过失速机动控制最终所要解决的问题。
当先进战斗机过失速机动时,流经其机身和机翼的气流随着飞机迎角的增大,由常规的附着流慢慢分离,当迎角进一步增大时,分离的气体形成旋涡,气流漩涡随着迎角的继续增大而慢慢向机身后部移动,最终在某个大迎角下旋涡破裂。这些气流流动现象使得先进战斗机在过失速机动时所受的气动力具有严重的非线性、迟滞性和耦合性,此时作用在飞机上的气动力被称之为非定常气动力,与常规迎角飞行时的气动力差异较大。因此,常规气动力模型已不再适用,必须建立准确的非定常气动力模型。对于非定常气动力建模方法的研究,由于CFD处理非定常流较为复杂且效果较差,大迎角气动数据基本由大幅振荡风洞试验获取。已有的非定常气动力建模方法主要分为2类:单轴振荡和双轴耦合振荡下的非定常气动力建模,涵盖了非线性代数多项式模型、一阶微分模型、Fourier分析模型、状态空间模型、模糊逻辑模型、支持向量机模型等其他智能建模方法[2]。
先进战斗机过失速机动时,飞机模型本身的非线性以及非定常气动力引起的非线性、迟滞性和耦合性,这些将给先进战斗机的控制带来诸多困难,因此采用非线性控制方法是过失速机动控制中必不可少的途径。常规的非线性控制方法包括增益调度法、动态逆方法、反步法、神经网络方法、滑模控制等。文献[3]建立了准确的飞机六自由度非线性模型,首次提出了利用动态逆方法解决飞机过失速机动时的控制问题,但是没有考虑非定常气动力对控制的影响。文献[4]在建立了非定常气动力模型的基础上,采用了增益调度的方法实现了过失速机动控制,并且在小迎角和大迎角区域通过LPV切换方法保证了过失速机动控制时的稳定性。文献[5]讨论了一种基于神经网络的超机动飞机直接自适应重构控制方法,在飞机发生舵面故障时神经网络通过自适应地补偿逆误差,可以快速在线重构控制律,保持飞机稳定和一定的操纵品质。文献[6]提出了一种基于B-spline网络和动态面控制方法的过失速机动飞行控制律设计方法。针对飞机气动力和力矩的非线性和不确定性,引入具有学习和记忆功能的B-spline网络,消除了backstepping设计方法中由于对虚拟控制反复求导而导致的复杂性问题。文献[7]提出了一种具有非定常气动力扰动和输入饱和的飞行器纵向姿态动力学的鲁棒有限时间机动控制方案,取得了不错的控制效果。
在非线性控制方法中,动态逆方法采用时标分离思想,依据不同的带宽实现快慢变量的准确控制,因此在非线性控制中被广泛应用。但动态逆方法也存在模型精度要求高、鲁棒性不强的缺点。诸多学者针对这些缺陷设计了改进动态逆方法。文献[8]采用非线性动态逆和结构奇异值综合方法设计了过失速飞行条件下飞控系统控制律,解决了飞控设计中面临的非线性和鲁棒性问题。文献[9]提出了一种新的非线性组合控制系统,结合了多变量单纯形样条的动态逆控制分配给出了多元样条模型的解析Jacobi和Hessian的新表达式。实现了飞机在整个飞行包线的非线性空气动力学建模,并且这种基于非线性样条的控制器可应用于飞行包线较大的高性能飞机的控制。文献[10]基于动态逆提出了一种战斗机大迎角机动非线性鲁棒控制方法,模型的不确定性和外界噪声均被考虑,且未知的气动力被估计和补偿,最终结合推力矢量控制取得了不错的鲁棒性能。文献[11]结合9状态的UKF滤波和非线性动态逆方法实现了飞机的矢量滚筒控制。综上可见,动态逆方法和其他改进方法结合实现了飞机过失速机动的控制,并提高了控制精度和控制鲁棒性,但是这些方法没有考虑非定常气动力引起的控制迟滞,且在工程实际中较难实现。
本文将基于中国航空工业空气动力研究院的FL-8风洞试验数据[12],采用具有较高的建模精度和较强的鲁棒性能的改进ELM方法建立双轴耦合振荡下的非定常气动力模型[13]。针对过失速机动控制时非定常气动力引起的控制误差和控制迟滞,提出了改进的实用动态逆方法,并推导了缩减频率的等效公式,结合串接链分配方法实现了先进战斗机缩比模型“赫伯斯特”过失速机动准确控制。
1 问题描述
在过失速机动实现过程,对于大迎角数据的获取是整个气动建模的关键,尤其是双轴耦合振荡下(模拟类似“赫伯斯特”机动)的风洞试验数据显得尤为珍贵。本文采用了中国航空工业空气动力研究院的FL-8风洞试验装置中缩比模型的风洞数据。该缩比模型具有先进的气动布局,其可操纵的气动机构有:左右平尾、左右副翼、左右垂尾、前缘和后缘襟翼、左右带有推力矢量的发动机,具体参数如下:机长为1.182 5 m,翼展为0.847 5 m,机翼面积为0.304 7 m2,平均气动弦长为0.426 9 m,重量为8 kg。
对于先进战斗机过失速机动控制,其主要控制变量为气流角。气流角和三轴角速率的模型如下

(-L+Mgcos(γ)cos(μ))/mVcos(β)+
(-Txsin(α)+Tzcos(α))/mVcos(β)
(1)

(Ycos(β)+Mgcos(γ)sin(μ))/mV+
(-Txsin(β)cos(α)+Tycos(β))/mV-
Tzsin(β)sin(α)/mV
(2)

{L(tan(γ)sin(μ)+tan(β))-
mgcos(γ)cos(μ)tan(β)+
(Y+Ty)(tan(γ)cos(μ)cos(β))+
(Txsin(α)-Tzcos(α))tan(γ)sin(μ)+
(Txsin(α)-Tzcos(α))tan(β)-
Txcos(α)tan(γ)cos(μ)sin(β)-
Tzsin(α)tan(γ)cos(μ)sin(β)}/mV
(3)
(4)

(5)
(6)
本文所要解决的问题就是针对上述先进战斗机非线性模型,考虑到过失速机动时飞机所受的非定常气动力,将期望的三轴力矩系数合理地分配到常规气动舵面和推力矢量喷口,实现双轴耦合下的过失速机动的精准控制。
2 基于改进动态逆的过失速机动控制律设计
2.1 控制框图
围绕本文所要解决的关键问题,本文重点是在非定常气动力作用下设计控制精度较高的过失速机动控制律。整个控制结构框图如图1所示。首先基于双轴耦合大幅振荡风洞试验数据,利用改进的ELM方法,通过离线方式建立准确的非定常气动力模型;其次,在飞机建模时考虑非定常气动力影响,而基于常规气动力模型利用改进的动态逆方法设计通用性强、鲁棒性能好的过失速机动控制律;最后,由ELM方法在线解算非定常气动力并在线求取常规气动舵面和推力矢量喷口的偏转角度,完成“赫伯斯特”过失速机动仿真验证。
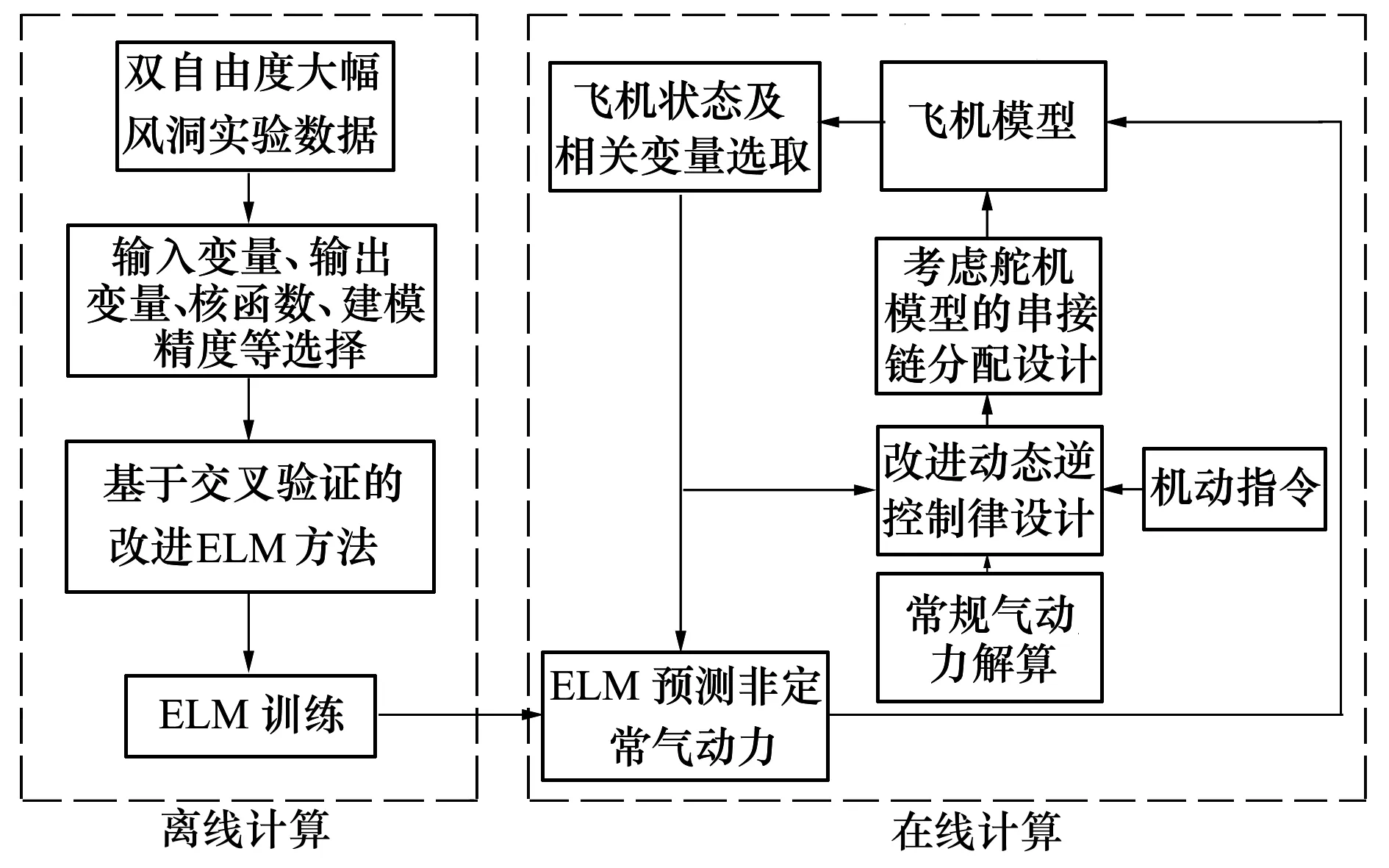
图1 非定常气动力作用下过失速机动控制框图
2.2 非定常气动力建模
本文利用改进的ELM方法实现双轴耦合非定常气动力建模。极限学习机是基于单隐含层前馈神经网络发展而来。通常情况下,w选取为
(7)
式中,wji是第i个输入变量与第j个隐含神经元的连接权值。
β取为
(8)
式中,βjk为第j个隐含神经元与第k个输出变量间的连接权值。
隐含层中的偏置b为
(9)
设Q个样本数据其输入X和输出Y为
(10)
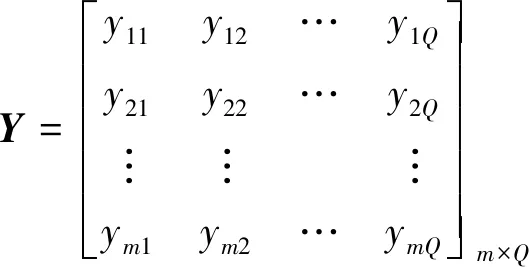
(11)
设激活函数为g(x),根据SLFN的网络结构组成,则输出T为
j=1,2,…,Q
(12)
式中
则(12)式可写成
Hβ=TT
(13)
式中,H即为SLFN的隐含层输出
由Moore-Penrose可推出β为
(14)
常规ELM方法建模精度不高,借助于交叉验证和增量参数形式,改进后的ELM方法[13]建模结果如下所示,其中选择迎角、迎角一阶导数、侧滑角、侧滑角一阶导数和缩减频率作为ELM的输入变量,而三轴力系数和力矩系数作为输出变量。在ELM训练时将上述输入变量作为模型输入,而将三轴力系数和力矩系数的风洞试验值作为模型训练时的采样值,以此训练获得模型结构参数。

图2 偏航-滚转耦合振荡下基于改进ELM方法的非定常气动力建模结果
从图2仿真结果可知,改进的ELM方法可以建立准确的双轴耦合振荡非定常气动力模型,为后续过失速机动提供了可靠的气动模型。
2.3 改进动态逆控制律设计
2.3.1 快回路改进
对于(4)~(6)式中内回路模型,基于仿射非线性方法可表示为
(15)
式中相关变量定义如下
(19)
在控制律设计时,期望的三轴角速率为
(20)
式中:pc,qc,rc为期望快回路输入信号,由外回路计算得到;ωp,ωq,ωr为带宽参数。
采用基于串接链分配方法的动态逆快回路设计思想:期望的三轴力矩系数先通过常规气动舵面偏转产生,如果常规舵面达到速度或位置限制,剩余的期望力矩系数再由推力矢量产生,这样可避免推力矢量发动机长时间处于工作状态,延长推力矢量发动机寿命。
(21)
式中,ωpi,ωqi,ωri分别为三轴角速率误差的积分系数。
从上述分析可知,对快回路的改进仅仅是改变了对象和控制系统对消之前的三轴角速率的期望值,对于对消部分仍是保持常规动态逆的形式。
2.3.2 较慢回路改进
较慢回路主要控制α,β,μ,其输入是慢回路的控制律解算输出αc,βc,μc,较慢回路输出pc,qc,rc。较慢回路可重写为
y2=x2
(22)
式中
x1=[p,q,r]T
x2=[α,β,μ]T
(23)
(24)
式中
(25)

(26)
同样,较慢回路的期望信号表示为
(27)
可求得快回路的期望输入为
(28)
由于非定常气动力的作用,导致常规动态逆方法控制结果具有严重的迟滞性,其主要原因是相位滞后造成的。因此,可采用串联滞后校正装置改善常规动态逆方法控制结果的迟滞性。根据上述分析,基于动态逆方法较慢回路的期望系统可写为
(29)
式中,Gc(s)为滞后校正装置
(30)
改进后的较慢回路输出为
(31)
将(31)式带入(22)式可得
(32)
综上可知,在加入串联滞后校正环节后不会改变原有动态逆方法较慢回路的对消性,并且极大地削弱了较慢回路的相位滞后现象。
2.3.3 稳定性证明
·快回路
将快回路控制律带入(15)式可得
(33)
(33)式可分为3个通道,以俯仰通道为例
(34)
基于拉普拉斯变换,(34)式可写为
sq=ωq(qc-q)+ωqi(qc-q)/s
(35)
整理可得
(36)

·较慢回路
(37)
同样,将(31)式分为3个通道,以迎角通道为例
(38)
基于拉普拉斯变换,(38)式可写为
(39)

2.4 等效缩减频率推导
在大幅振荡风洞试验中,迎角和迎角的导数变化规律为
α=α0+αmsin(ωt)
(40)
式中,α0是迎角初值;αm为大幅振荡幅值;ω为角速度,ω可由(40)式推导得出
(41)
结合缩减频率k定义
(42)
将(41)式带入(42)式,且ω=2πf,可推导得出缩减频率的等效公式为
(43)
需要明确的是:对于(43)式,俯仰-滚转耦合振荡下的缩减频率计算较为准确,其他振荡形式下的等效缩减频率计算,只在一定的迎角变化范围内也适用。
3 仿真验证
基于上述改进动态逆方法设计的过失速机动控制律,在V=30 m/s,H=1 000 m下的平飞状态下实现“赫伯斯特”机动。
对于改进的动态逆方法纵向主要参数为ωα=3.5,ωCα=0.025,ωDα=0.2,ωq=12.0,ωqi=2.0,横侧向主要参数为:ωβ=2.0,ωCβ=0.05,ωDβ=0.4,ωμ=3.0,ωCμ=0.016,ωDμ=0.1,ωp=10.0,ωpi=1.0,ωr=10.0,ωri=1.0。整个“赫伯斯特”机动的仿真结果如图3~13所示,且与文献[3]中的常规动态逆方法进行了对比。
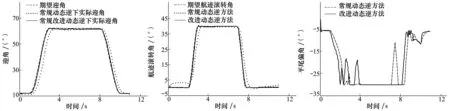
图3 迎角曲线图 图4 航迹滚转角曲线图图5 平尾偏转角曲线图

图6 副翼偏转角曲线图 图7 方向舵偏转角曲线图图8 前缘襟翼曲线图

图9 后缘襟翼曲线图 图10 矢量喷口滚转偏转角曲线图图11 矢量喷口偏航偏转角曲线图
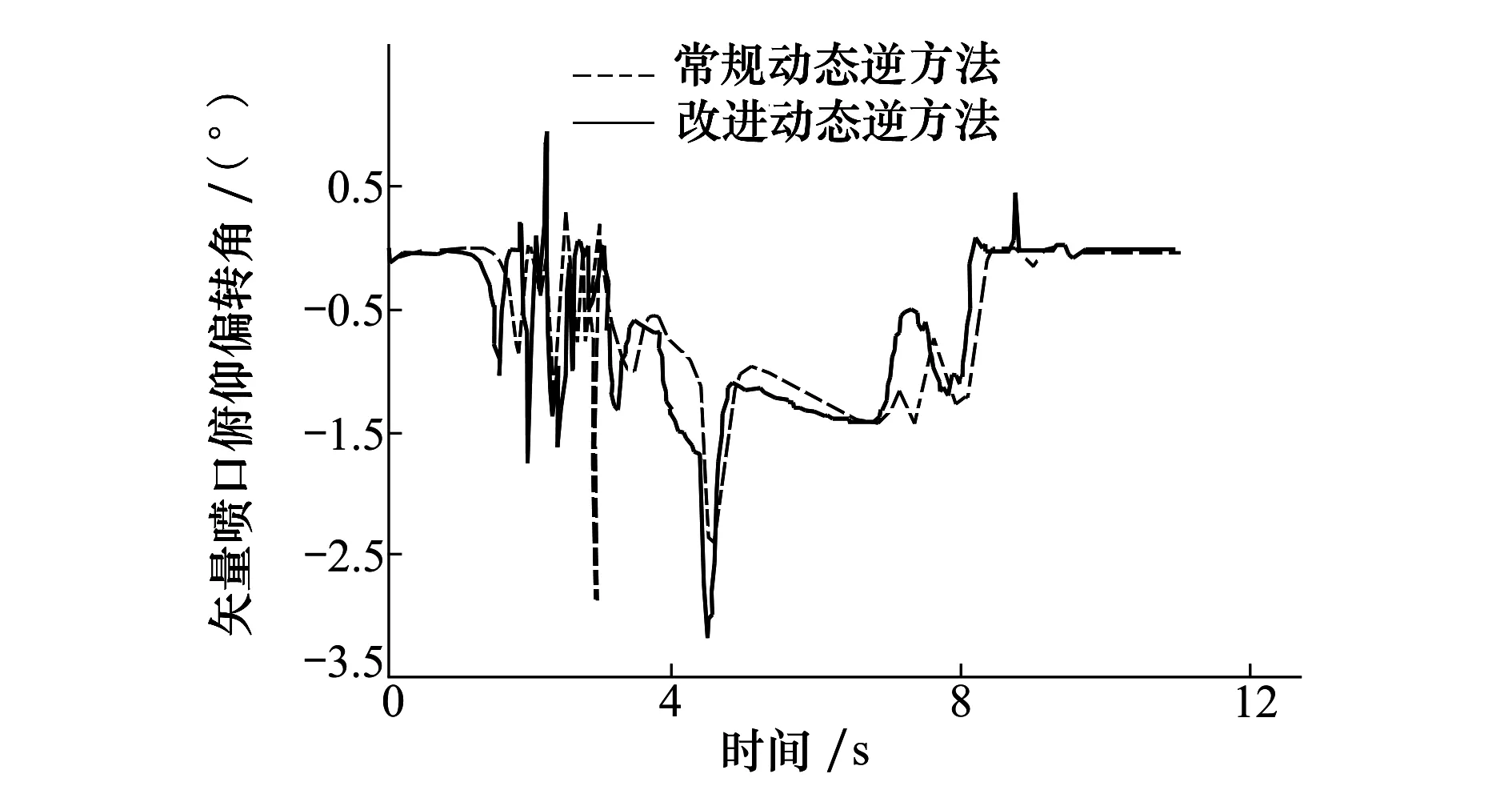
图12 矢量喷口俯仰偏转角曲线图
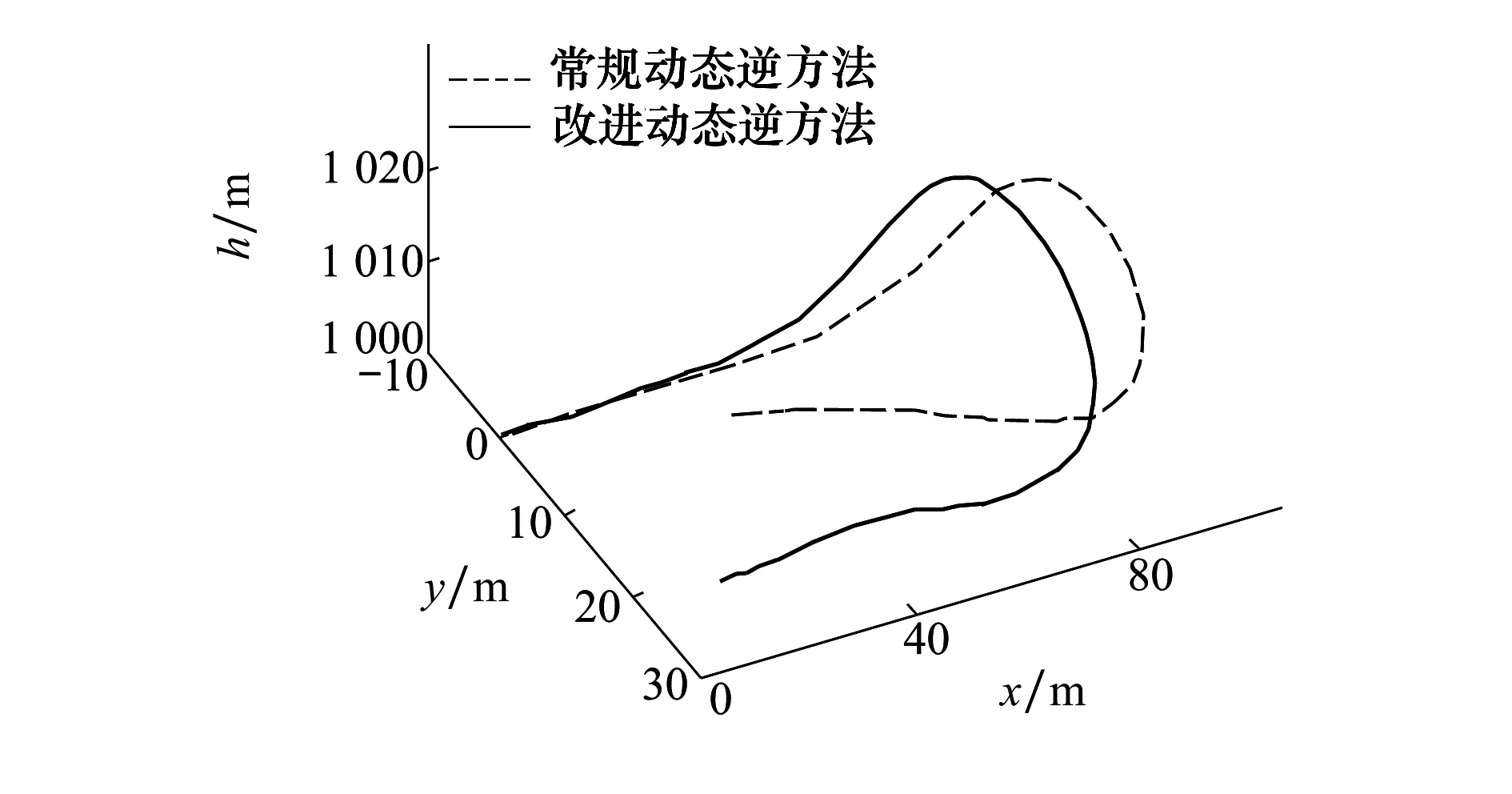
图13 “赫伯斯特”机动三维轨迹图
分析上述仿真结果:在大迎角下,即便处于舵机模型的物理限制下,常规气动舵面偏转幅度较大,且在迎角较大情形下常规舵面偏转达到了饱和限制,此时推力矢量喷口偏转逐渐增大。但是,即使在气动参数变化较为剧烈的情形下,基于改进动态逆方法与常规方法相比取得了不错的控制效果,其控制精度较高,且迎角和航迹滚转角控制基本无滞后现象。在整个“赫伯斯特”机动中,高度仅变化了20 m即实现了飞机180°转弯,基于改进动态逆的仿真三维轨迹更加贴合实际。
为了验证本文所提方法的鲁棒性能,考虑气动建模的不确定性,在三轴气动力系数和气动力矩系数中加入了不同幅值(0.05,0.02,0.1,0.01,0.01)的不同初始相位的正弦形式的气动扰动,基于本文提出的改进动态逆方法获得的最终的赫伯斯特控制结果如图14~15所示。
从仿真结果可知,当气动参数存在一定范围内的扰动时,本文提出方法仍能取得一定的控制效果,迎角和航迹滚转角仍能较好地跟踪上目标曲线。对于扰动值更大的情况,则需从鲁棒性能入手,设计具有较高鲁棒性能的过失速控制律。

图14 气动参数扰动下迎角跟踪对比曲线图
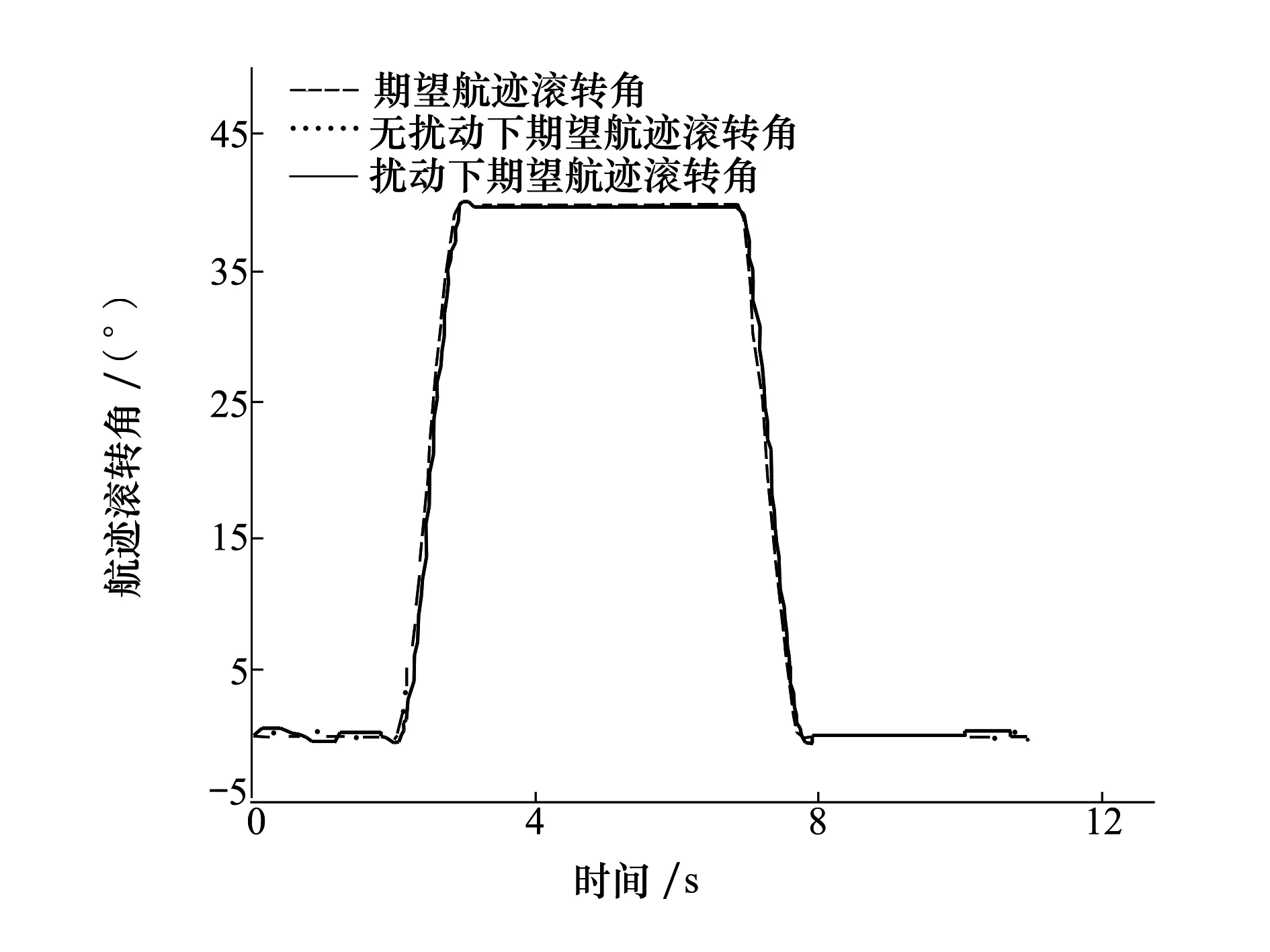
图15 气动参数扰动下航迹滚转角跟踪对比曲线图
4 结 论
本文在双轴耦合大幅振荡风洞试验数据的支撑下,通过改进ELM方法建立了准确的非定常气动力模型,基于改进的动态逆方法并结合串接链分配方法实现了先进布局飞机常规气动舵面和推力矢量喷口偏转的分配,并且削减了非定常气动力引起的控制误差和控制迟滞,最终实现了“赫伯斯特”机动的仿真验证,为后续大迎角试飞验证提供了实用控制方法。
