基于机器视觉的直插式元件PCB焊接机器人设计
2019-07-03佟贵林于清策付直刚沈阳工业大学辽阳分校辽宁辽阳111003
佟贵林,王 磊,于清策,付直刚(沈阳工业大学 辽阳分校,辽宁 辽阳 111003)
1 行业现状
在现代社会,电子产品已经进入到生活的方方面面。作为电子产品核心支撑部件的印刷电路板(PCB)让电子产品的批量化、智能化成为可能。电子产品的功能集成度越来越高,大规模印刷电路板的器件安装大部分采用表面贴装技术(SMT)。但部分中小型企业仍然采用传统手工焊接的方式,生产成本高、效率低。目前该领域的自动焊接机器人成本都在10万元以上,给中小企业增加了一部分负担。“直插式元件PCB焊接机器人”将把成本控制到万元级别。“直插式元件PCB焊接机器人”系统将为生产电子产品的中小企业提供一种用于替代原来手工焊接直插型PCB板的低成本解决方案。
2 “直插式元件PCB焊接机器人”设计方案
2.1 总体框架
“直插式元件PCB焊接机器人”系统包括:上位机主控制单元、下位机辅助控制单元、图像采集单元、精密机械驱动单元、焊接单元。上位机主控制单元负责对输入的PCB图像信息进行分析和计算,并输出控制指令;下位机辅助控制单元负责执行上位机发送的指令,向图像采集单元、精密机械驱动单元、焊接单元发送控制信号;图像采集单元、精密机械驱动单元、焊接单元是前端执行机构。具体结构关系如图1。
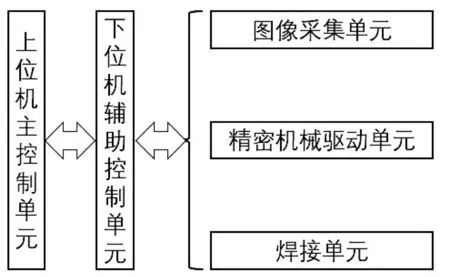
图1 “直插式元件PCB焊接机器人”总体框架
2.2 采用的主要器件
图像采集单元主要由CCD(Charge-coupled Device)摄像头、图像采集卡以及LED光源组成。CCD成像系统具有良好的光敏特性,图像失真较小,能够满足光学检测的技术要求。摄像头获取图像数据并将其传至图像采集卡,由图像采集卡完成图像的采集工作,并将图像传送到计算机主控程序进行处理,同时图像系统通过接收上位机控制系统发送的工作指令继续不间断实现对图像的采集与传输。为了获得更清晰的图像,对LED照明光源进行了改进,使其能够与摄像头配合,充分识别各种PCB板的状态信息。印刷电路板(PCB)的数字图像由计算机软件系统进行处理,主要是定位焊盘位置,生成位置坐标,并区分已经焊接焊盘和未焊接焊盘。
精密平台的机械结构采用X/Y二自由度结构。该平台工作方式是将待检测电路板放置于定位平台的动平台上,图像采集系统固定不动,控制系统控制动平台进行运动定位,从而使摄像头系统进行电路板的图像采集工作。这种X/Y定位平台的优点是结构紧凑、运动控制精度高,可以满足不同层次的生产工艺要求。精密平台的驱动单元使用了高性能全桥变频电机驱动器,能够保证系统定位的快速性与准确性。
主控上位机和辅助下位机两层结构组成系统控制核心。使用高性能的计算机承载上位机控制系统,负责系统的图像计算和识别,也包括人机界面管理和控制任务调度;下位机作为中继控制器,主要负责接收上位机的控制命令,向上位机传送采集到的图像数据及装置状态参数。机械驱动控制算法采用传统PID控制。PID反馈控制通过对被控量与给定量的差值进行调节,使其接近理想的期望值,其控制应用范围广、适应性强、参数易于整定,能够减少控制过程中的超调和调节时间,实现无差控制。该系统示意图如图2。

图2 “直插式元件PCB焊接机器人”系统示意图
3 “直插式元件PCB焊接机器人”检测结果及结论
“直插式元件PCB焊接机器人”样机已经完成基本性能调试。测试结果证明该系统能够实现视觉自动识别精确定位焊盘位置,并利用精密控制平台进行定位和焊接。根据调查反馈信息,中小企业的对这类生产设备有较大需求,“直插式元件PCB焊接机器人”能够将设备成本降至原有水平的20%左右,并且提高了生产效率,在该领域有竞争优势。