面向铁路巡检的无人机飞行路径规划方法
2019-07-03王泉东伍道乐罗意平魏晓斌
王泉东,伍道乐,杨 岳,罗意平,魏晓斌
(1.中南大学 交通运输工程学院,长沙 410083;
2. 株洲电力机车有限公司 大功率交流传动电力机车系统集成国家重点实验室,株洲 412000)
近年来,随着我国铁路交通的快速发展,铁路运营安全受到了前所未有的重视。目前,铁路线路的巡检主要由工作人员完成,但由于铁路线路跨度大,有很大一部分的铁路线路处于恶劣环境或不便工作人员巡检的区域,人工检查费时费力,效率较低[1]。无人机具有灵活机动,无视地形的特点,使用无人机进行铁路线路巡检,可以提高铁路线路的检测效率,并且其铁路巡检工作与铁路系统的正常运营互不干扰。
无人机的路径规划是实现无人机沿铁路自动巡航的前提。需要对巡检路径进行规划,才能保证无人机的飞行安全,并使无人机严格沿着铁路线路飞行。针对无人机的路径规划,国内外学者进行了很多尝试。Pall[2]提出了一个基于消失点的无人机轨道跟踪方法,使用边缘检测法提取无人机前置摄像头获取图像中两条轨道代表的直线的交叉点,计算铁路线路的消失点,并将消失点用于调整无人机的飞行方向,该方法仿真效果良好,但未经过实际验证。邓荣军[3]基于遗传算法规划输电线路的无人机巡检路径,采用极坐标编码方式构造无人机巡检路径模型,并设计了适合无人机巡检路径规划的遗传算子,仿真结果表明,该方法具有良好的可靠性。王梦茹[4]设计了顺序航带法和间隔航带法两种用于低空摄影测量的无人机航迹规划方法,并使用无人机进行了飞行验证,实验结果表明,顺序航带法的普适性较强,间隔航带法采集的数据质量更高。魏潇龙[5]提出了一个基于改进蚁群算法的无人机飞行路径规划方法,在利用卡尔曼滤波对ADS-B信息进行修正的基础上,设计了无人机冲突感知的技术方案,该方案可避免无人机与有人机之间的飞行冲突。王锐[6]针对输电线路无人机巡检的安全问题,设计了无人机巡检地面测控站及运输保障系统,对设备选型、 空间设计、电磁兼容、 安全性等方面进行了综合考虑, 以满足输电线路无人机巡检的特殊要求。
以上的无人机路径规划方法不适用于真实场景下的铁路线路巡检,为满足地质灾害发生处、桥梁、悬崖等特殊环境下的铁路线路巡检的特殊需求。本文搭建了一个基于无人机的铁路巡检平台,使用基于三次样条插值法的无人机路径规划方法指导无人机的飞行路径。
1 铁路巡检平台搭建
为了获取铁路沿线的实况视频数据,提高铁路巡检效率,搭建了铁路巡检平台。铁路巡检平台由无人机、实时动态(RTK,Real Time Kinematic)测量仪、云台、相机组成,其构架如图1所示。
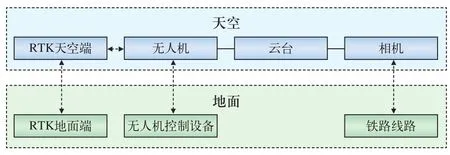
图 1 铁路巡检平台构架
其中,无人机是其他设备的飞行载体,搭载其他设备沿着铁路线路飞行。无人机的飞行与工作通过专用的控制设备控制。为了保证无人机飞行路径与铁路线路的贴合度,需预先对无人机的飞行路径进行规划,并将规划好的无人机飞行路径导入无人机控制设备,用于指导无人机沿铁路线路的自动巡航。
RTK是铁路巡检平台的高精度定位部件,分为天空端和地面端两个部分。RTK地面端固定在地面作为参考点,通过连续接收卫星信号解算其所在位置的高精度卫星坐标,并将位置信息传送给RTK天空端;RTK天空端安装在无人机上,结合GPS信息和RTK地面端提供的位置信息计算无人机的厘米级三维定位坐标。
云台是无人机与相机的连接部件,将相机固定在无人机上,在维持相机稳定的同时增大相机拍摄范围。相机是采集铁路沿线视频数据的部件,以俯视视角拍摄铁路实况,为铁路线路的故障诊断提供参考数据。为了满足铁路巡检的需求,最终搭建的铁路巡检平台各部分的参数如表1所示。

表1 铁路巡检平台部件与参数
2 无人机飞行路径模型
2.1 无人机飞行路径模型构成
无人机在飞行过程中,以RTK获得实时大地坐标(Bi,Li,Hi)(Bi为纬度,Li为经度,Hi为海拔)为参考,计算实际位置与预设飞行路径之间的差值,并调整飞行偏差。为了使无人机沿铁路线路飞行,建立了无人机飞行路径模型,用于规划无人机飞行路径。
建立的无人机飞行路径模型由飞行路径海拔函数、飞行路径经度与纬度函数组成。飞行路径海拔函数通过铁路线路坡度与现场障碍物高度确定,飞行路径经度与纬度函数通过三次样条插值法(Cubic Spline Interpolation)求取。
三次样条插值法是通过解三弯矩方程组,求取通过一系列形值点的一条光滑曲线的方法。求解出的三次样条曲线处处光滑,且在每一个小区间内次数都≤3。考虑到铁路线路的拐弯半径在300 m以上[7],且拐弯处曲率变化平缓,平顺性较好,故三次样条曲线能较好地表征铁路线路的经度和纬度之间的函数关系。本文使用RTK获取实验铁路线路上的坐标点作为三次样条曲线的形值点,以此为基础求解无人机飞行路径的经纬度三次样条曲线。
2.2 无人机飞行海拔
考虑到铁路线路的运输能力和牵引质量,铁路的坡度在3‰以下[8],故可将铁路线路所在的面视为水平面。因此在建立无人机飞行路径模型时,只需要预先考察好铁路现场障碍物高度,就能根据RTK地面端测得的地面海拔信息与现场障碍物高度信息确定无人机飞行的海拔。设地面海拔高度为H0,障碍物高度为ΔH,则无人机飞行路径的海拔如公式(1)。
Hi=H0+ΔH(1)
2.3 无人机飞行路径经度与纬度关系
为了确定无人机的飞行路径的经度与纬度函数关系,需要获取巡检路段的起点、终点与间隔采样点的坐标值。设采集到的巡检路段坐标点如表2所示,无人机飞行路径经度与纬度之间的三次样条函数为S(L)。则在采样点Li处,S(L)的解满足式(2),且二阶导数如式(3)。函数f(L)表示采集的样本点经度与纬度的映射关系。

表2 巡检路段坐标点

由于三次样条函数S(L)被n个样本点分割为n-1段,则在子区间[Li-1,Li]内,三次样条函数可记为Si(L)。由于S(L)是不高于三次的多项式,其二阶导数为线性函数或常数,则在子区间[Li-1,Li]内,对于任意L,满足式(4)。

其中,hi=Li-Li-1。
将式(4)连续积分两次,并且利用插值条件Si(Li-1)=Bi-1,Si(Li)=Bi求取积分常数,整理后得式(5)。
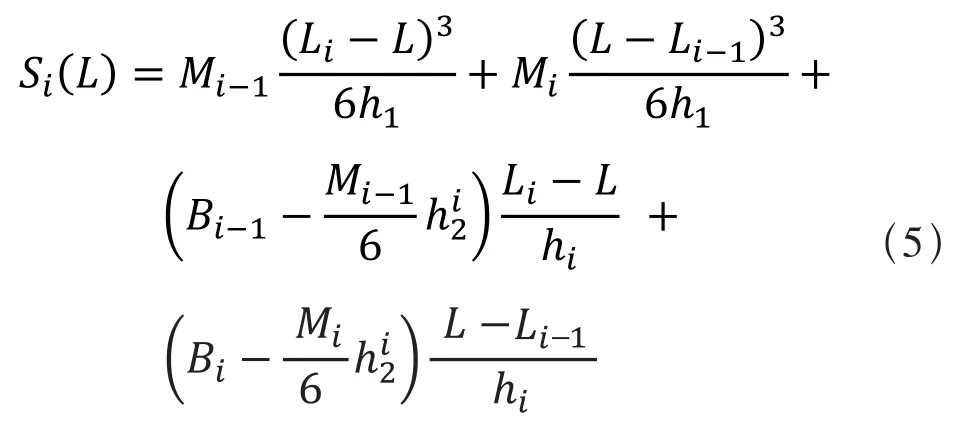
从式(5)中可以看出,只要求解出Mi的值,即可确定三次样条插值函数Si(L),由连续条件与边界条件可知,Mi可通过线性方程组(6)求解。
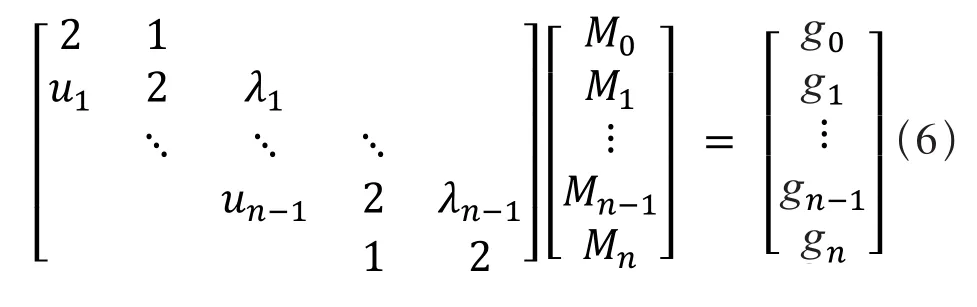
式(9)中,由曲线光滑边界条件可得g0与gn的求解方法为式(10):
3 实验
3.1 实验准备
本文选取的实验场地为广州货运段凝霞基地某车辆较少的路段,实验环境如表3。实验线路长度为1 km;轨道为轨距为1 435 mm;现场最高的障碍物高8 m(接触网中心柱);线路上布置了岩石、纸箱、行人、泡沫塑料等物体,用于模拟铁路线路的异常情况。

表3 实验环境
在MATLAB中建立了基于三次样条插值法的无人机飞行路径模型,并使用模型生成无人机飞行路径。同时,选用DJI GSPRO无人机控制软件来读取生成的无人机飞行路径,并对无人机进行控制。
3.2 实验过程
为了获取规划无人机飞行路径的原始数据,首先手动操控本文搭建的基于无人机的铁路线路巡检平台沿铁路线路巡航,并基于RTK的厘米级定位记录了铁路线路的5个坐标点,如表4示所,为了保证飞行路径的精度,将坐标点取至小数点后9位。
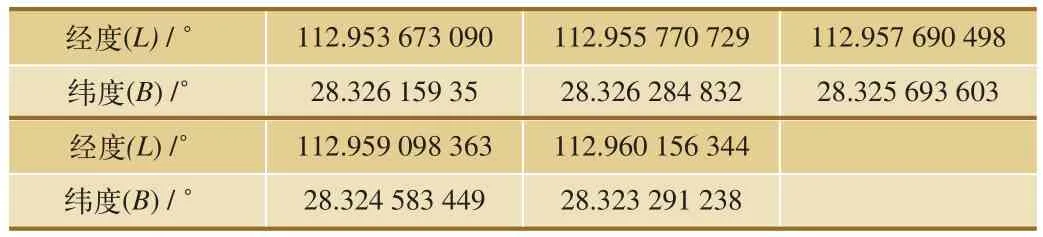
表4 实验线路坐标点样本集
将这5个点制作成KML文件导入无人机控制软件DJI GSPRO,生成的无人机飞行路径如图2a。此时无人机飞行路径由折线组成,与铁路线路的贴合度较差。在MATLAB中使用提出的无人机飞行路径模型对5个点坐标进行处理,生成的无人机飞行路径的三次样条曲线如图2b。由图可见,生成的飞行路径较为光滑,且曲线轮廓与铁路线路贴合度较高。
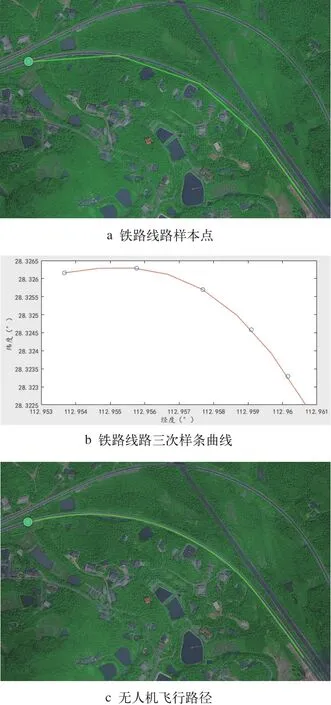
图2 无人机飞行路径规划
对图2b中的曲线进行密集间隔取样,获得一系列铁路线路坐标点,如表5,将所得的坐标点制作成KML文件后导入无人机控制软件,生成无人机飞行路径如图2c。比较图2a与图2c可知,铁路线路的坐标点经过无人机飞行路径模型处理后,生成的无人机飞行路径与铁路线路贴合效果很好。
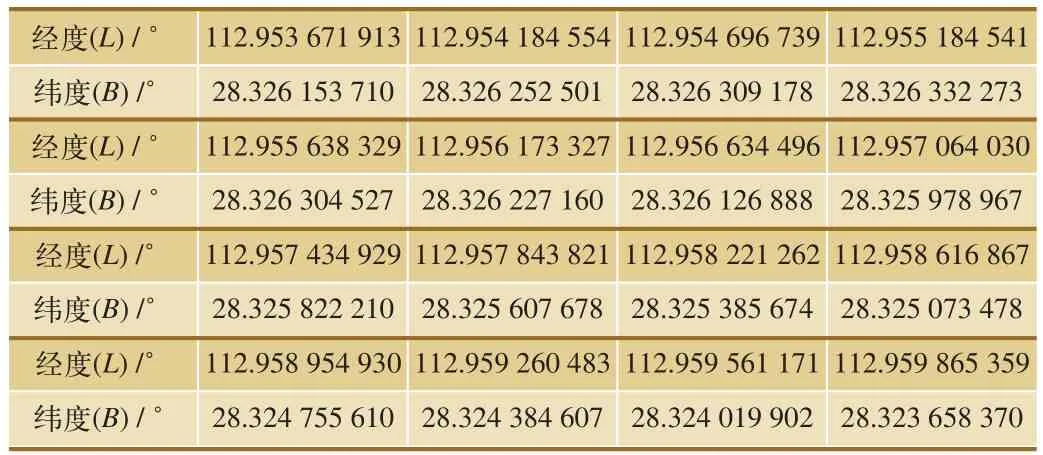
表5 实验线路间隔取样集
3.3 实验结果
按照无人机飞行路径模型,将无人机飞行的海拔高度设置为64 m,使用搭建的铁路线路巡检平台对生成的无人机飞行路径进行了测试,铁路线路巡检平台在铁路上方的左右偏差为±3 m。平台采集到的视频数据的画面能囊括铁路范围,且清晰度良好,如图3。证明了本文提出的无人机飞行路径规划方法的有效性。

图3 铁路巡检效果
4 结束语
为了提高铁路线路巡检效率,满足地质灾害发生处、桥梁、悬崖等特殊环境下的铁路线路巡检的特殊需求,本文搭建了基于无人机的铁路线路巡检平台,并基于三次样条插值法建立了无人机飞行路径数学模型,在MATLAB中对提出的数学模型进行了验证。实验结果表明,所提出的方法能较好地指导无人机沿铁路线路的自动巡航,可以满足特殊条件下铁路巡检的需求并保证巡航安全,具有较高的实用价值。