梯度域和深度学习的图像运动模糊盲去除算法
2019-07-02郭业才郑慧颖
郭业才, 郑慧颖, 叶 飞
(南京信息工程大学 a.江苏省大气环境与装备设计协同创新中心, b.电子与信息工程学院, 南京 210044)
0 引 言
在获取图像时,可能由于外界环境或成像设备等原因,使得图像存在不同程度的退化降质,如模糊、噪声等,这些退化降质的数字图像对人们的生产生活有着极大的影响。因此,去除模糊,得到清晰图像非常重要。现有的图像去模糊算法主要有:①利用自然图像的边缘先验信息恢复清晰边缘[1-7]。这些先验信息对图像去模糊是有效的,但需要解决非凸性问题。此外,优化方法和模糊核估计过程均很复杂,会导致计算成本较高。②运用深度学习网络实现图像去模糊[8-15]。目前,利用深度学习的方法实现图像去模糊,在去卷积的过程中会使图像过于平滑,导致图像的高频信息和图像纹理细节丢失,这样不仅花费时间较长,而且会导致图像的振铃效应更加明显。
本文针对现有图像去模糊方法的不足,提出一种基于梯度域和深度学习的图像运动模糊盲去除算法。该算法利用图像梯度域减少无关细节的影响,提高模糊核估计的鲁棒性。结果表明,该算法在有效保持边缘信息、显著减少振铃效应的同时,去模糊效果较好。
1 图像去模糊原理及方法
图像降质退化过程如图1所示。输入图像x,在模糊核k和噪声n影响下,得到模糊图像为
y=k[x]+n
(1)

图1 一般图像退化模型
图像盲去模糊即模糊核未知,需要从模糊图像y中获取清晰图像x和模糊核k。盲去模糊问题可以将求解出的模糊核转变为非盲去模糊问题,即
(2)
式中:⊗表示卷积操作;式中第1部分是数据保真项,利用L2范数进行约束;第2部分是先验正则约束项,它与原始清晰自然图像有关,λ是使约束项和数据保真项之间比例平衡的参数,正则项的选择与选取的图像先验有关。
图像盲反卷积问题的不适定性可以通过正则化方法解决,本文通过CNN的容错能力、并行处理能力和自学习能力,将CNN可以学习图像自身特征的性能用于去模糊的问题中,设计了一个有效的CNN网络结构。
2 图像运动模糊盲去除算法
2.1 图像预处理
首先,将引导滤波[16]后的图像作为基础图像,以减少噪声和多余细节的影响。然后,将L0滤波[5]后梯度域图像以及对应的清晰图像作为样本,对设计的CNN进行训练。本文中,引导滤波和L0滤波都是作用在清晰图像上的,可以抑制无关细节,增强图像的清晰边缘,提高了模糊核估计的鲁棒性。图2为图像预处理部分的结构流程图。
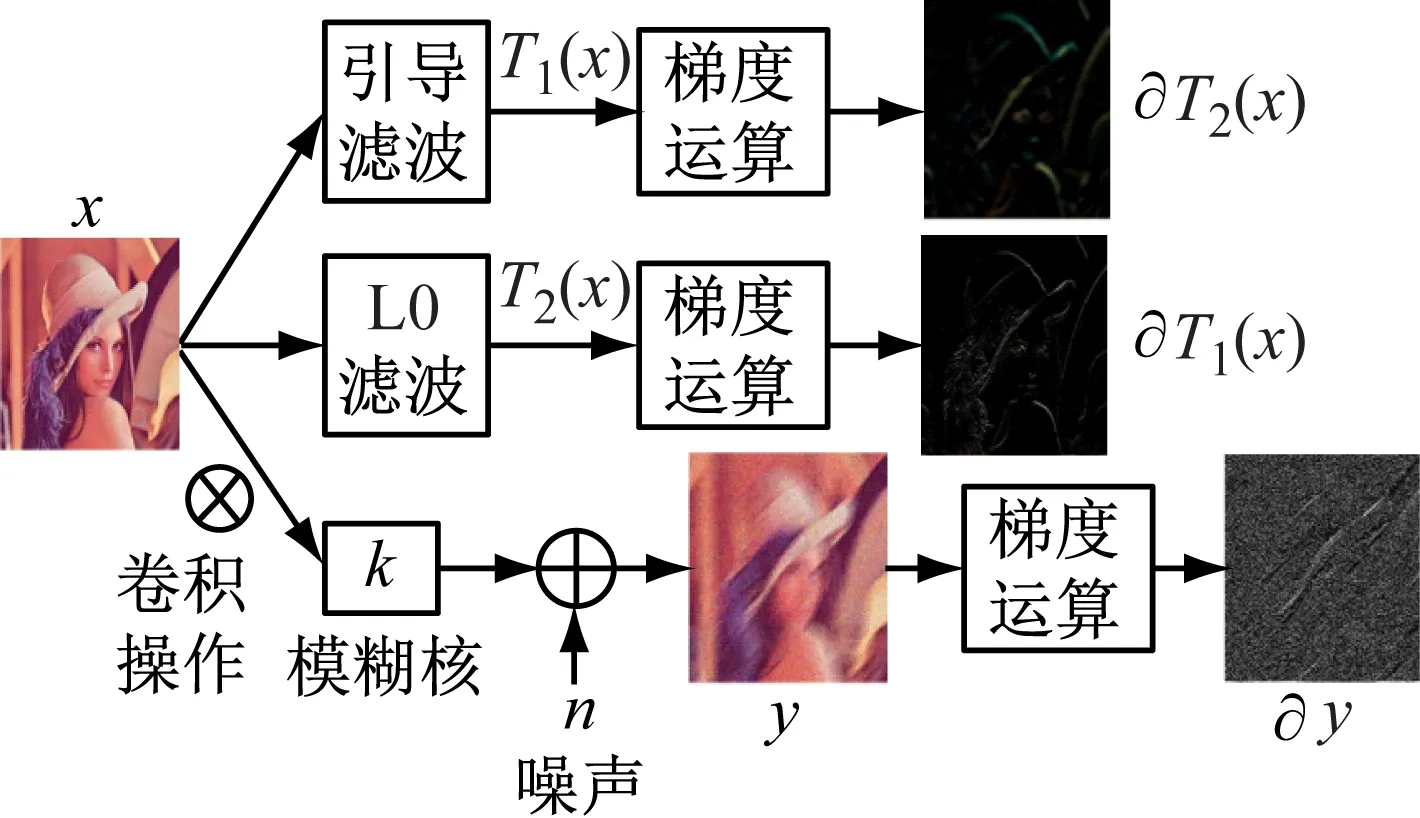
图2 图像预处理部分的结构流程
在利用滤波实现图像去模糊的基础上,提出利用引导滤波对图像进行预处理,因为通过引导滤波可抑制图像中的无关细节,并且保留图像的主要结构,如图3所示。其中,图3(a)是清晰图像;图3(b)是运动模糊噪声图像;图3(c)是清晰图像经过引导滤波后的图像;图3(d)是与清晰图像像对应的梯度域图像;图3(e)是模糊图梯度域图像;图3(f)是清晰图像经过引导滤波后的梯度域图像。
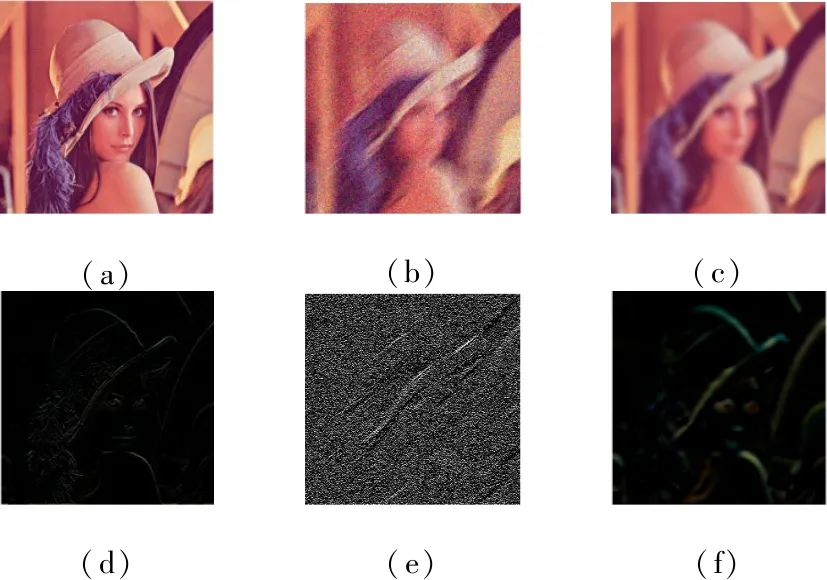
(a)(b)(c)(d)(e)(f)
图3 引导滤波处理结果图
2.2 卷积神经网络结构设计
文献[17]中提出利用梯度域图像训练CNN结构,而本文对文献[17]中的网络结构进行改进,提出利用较大卷积核提取图像的细节信息;加深网络层数使网络训练得到的权重数据更加准确。
现利用梯度域对网络进行训练。网络的输入分别经过引导滤波和L0滤波后的梯度域图像与其对应的模糊图像,输出为图像的边缘信息。把输入图片旋转90°后提取其边缘信息,与不旋转时提取边缘信息得到的效果相同,因此本方法仅利用垂直方向的梯度对网络进行训练,并在水平和垂直方向上共享权重,如图4所示。

图4 网络结构
由图4可得:
f0(∂y)=∂y
(2)
(3)
l=1,2,…,7

(4)

(5)
式中,{αm}是可学习的系数。
通过一组图像对D{∂yi,∂T1(xi)},网络的第1阶段可以描述为问题:

(6)
式中:D表示真实图像和模糊图像的训练对;采用基于L1损失的TV正则化方法对图像梯度进行稀疏化处理;λ是正则化的权重。由于L1范数在0处不可微,因此利用Charbonnier函数,即ρ(z)=(z2+ε2)1/2来估计它。目标函数可写为

(7)
为了训练第2阶段的网络,最后3层的输出为:
(8)

(9)

(10)
式中,gn是尺寸为q6×q6可学习的卷积核。
通过一组图像对D{∂yi,∂T2(xi)},网络的第2阶段可以描述为问题:
(11)
两个子网络训练完后,将这两个子网络结合为
(12)
式中,m=1,2,…,p5;n=1,2,…,p6。
整个网络训练过程loss值为
(13)
式中:ρ(z)=(z2+ε2)1/2,ε取10-6;λ为正则项的权重;fω(∂yi)是网络训练得到的边缘信息。
2.3 图像去模糊
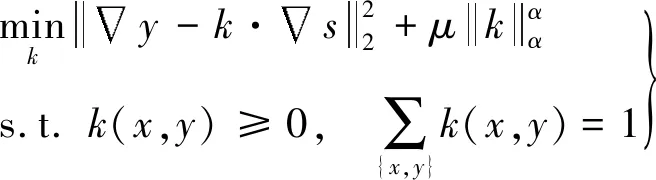
2.3.1 模糊核的估计

(14)
式中:参数η控制k的平滑度。第1项提供可靠边缘信息,第2项约束模糊核稀疏性,第3项
C(k)={(x,y)||∂xk(x,y)|+|∂yk(x,y)|≠0}
它的作用是使模糊核稀疏,也阻止出现不连续点,从而提高模糊核的连续性。
由于式(14)涉及到离散数值计算,因此很难直接对它求解最小值,本文将式(14)描述为:
(15)
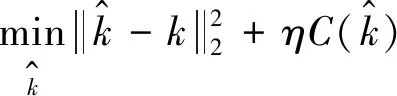
(16)
式(15)可以利用IRLS方法[19]求得,实验中,一共进行了3次迭代;式(16)可以通过交替优化[20]的方法求得解,一共进行了3次迭代。通过对上面两个子式的求解,最终可以得到模糊核k。
2.3.2 最终的潜像估计
得到模糊核后,最终潜像可通过非盲解卷积的方法获得。本文主要恢复运动模糊图像的边缘,采用TV正则化进行最终潜像的恢复,即
(17)
3 实验结果及分析
3.1 运动模糊图像生成
采用的图像数据库是BSDS500中的自然图像,为了获得模糊图像yi,对每一张清晰图像xi进行模糊处理。假设运动模糊是全局线性模糊,模糊核k=(l,o)受到长度和角度的影响。选取运动模糊的长度l从1~25,以2为间隔,角度o从0°~150°,以30°为间隔。由于当模糊核长度l=1时,不管运动方向是什么,所有的运动向量都对应着相同的模糊核,因此生成73个不同的模糊核。将这73个不同的模糊核与BSDS500中的500张自然图像xi进行随机卷积,再加上1%的高斯白噪声,就可以产生运动模糊图像。将产生的运动模糊图像裁剪成大小为45×45的模糊图像块,获得最终所需的模糊图像yi。本文通过给定模糊的图像yi,根据提出的方法首先计算垂直和水平方向的图像梯度,以梯度域图像作为卷积神经网络的输入。
3.2 网络结构
为了找到对图4所示结构作贡献的参数,进行了两组实验。两组实验中,CNN层数相同,每层滤波器数量不同,滤波器的大小不同。通过比较两组实验使用同一数据集在训练期间的loss值,来分析不同参数对实验结果的影响,如图5和图6所示。
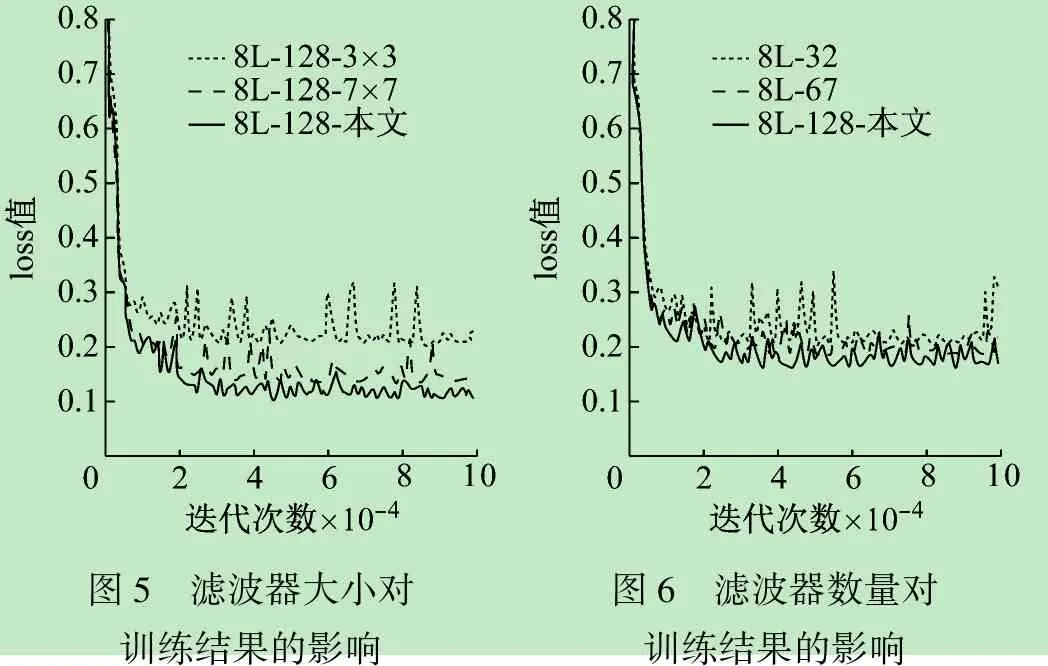
图5 滤波器大小对训练结果的影响图6 滤波器数量对训练结果的影响
训练整个模型一共进行10万次迭代,图5表示滤波器大小对训练结果的影响。整个网络一共8层,每层滤波器的个数均为128个。图中:紫色曲线是在大小不同的滤波器下获得的;蓝色曲线是在整个网络均使用5×5的滤波器下获得的;红色曲线是在整个网络均使用7×7的滤波器理获得的。图6表明,3种loss曲线约在85 000次时开始收敛,但本文方法采用不同大小滤波器时的loss值皆都低于其他两种情况。这表明,本文所选择的滤波器大小是合理的。
图6表示滤波器的数量对训练结果的影响。本实验的网络一共有8层,每层滤波器的大小均如图4所示,分别选取每层滤波器数量为64个和32个,与本文每层滤波器数量为128个进行对比。图中:紫色曲线是本文采用每层128个滤波器时获得的;蓝色曲线为网络每层使用64个滤波器时获得的,红色曲线为网络每层使用32个滤波器时获得的。图5表明,3种loss曲线大约在60 000次时开始收敛,但本文采用每层滤波器数量为128时的loss值均低于其他滤波器数量所对应的值。这表明,本文所选择的滤波器的数量是合理的。
3.3 去模糊效果
采用峰值信噪比(Peak Signal to Noise Ratio,PSNR)对去模糊的效果进行分析:
(18)
式中,T指图像像素强度的最大值。
去模糊效果分别与多层神经网络(Multi-layer Perceptron,MLP)方法[10]和边缘检测方法[21]进行对比。MLP方法利用多层感知器实现图像去模糊;边缘检测方法将图像结构与优化算法相结合应用于图像去模糊,如图7所示。
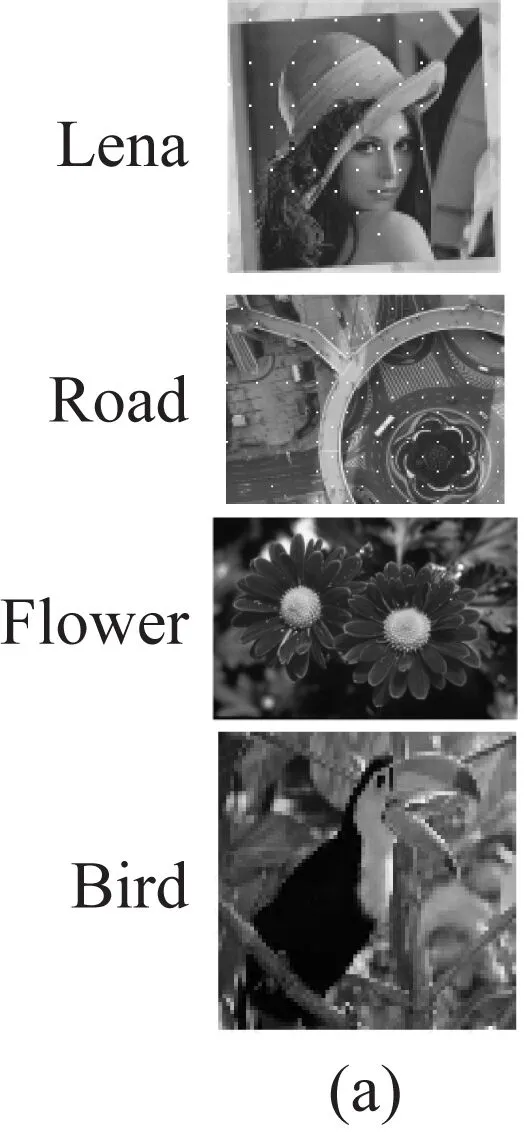
图7 去运动模糊效果
图7选取4张图像在不同模糊程度下,分别运用MLP方法、边缘检测方法及本文方法对图像进行去运动模糊。其中:图7(a)为原始清晰图像;图7(b)为模糊噪声图像;图7(c)为使用MLP方法去除运动模糊后的结果图,图7(d)为使用边缘检测方法去除运动模糊后的结果图,图7(e)为使用本文提出的算法去除运动模糊后的结果图。PSNR值如表1所示。由表1知,MLP方法与边缘检测方法去除运动模糊的PSNR值相差不大,但是MLP方法会放大噪声,边缘检测方法可能会给图像带来振铃效应。而本文方法的PSNR值在对比实验中值均明显高于其他两种方法,而且放大噪声与振铃效应均不明显,去运动模糊效果明显优于其他两种方法,这就表明本文算法能够有效地移除图像运动模糊。
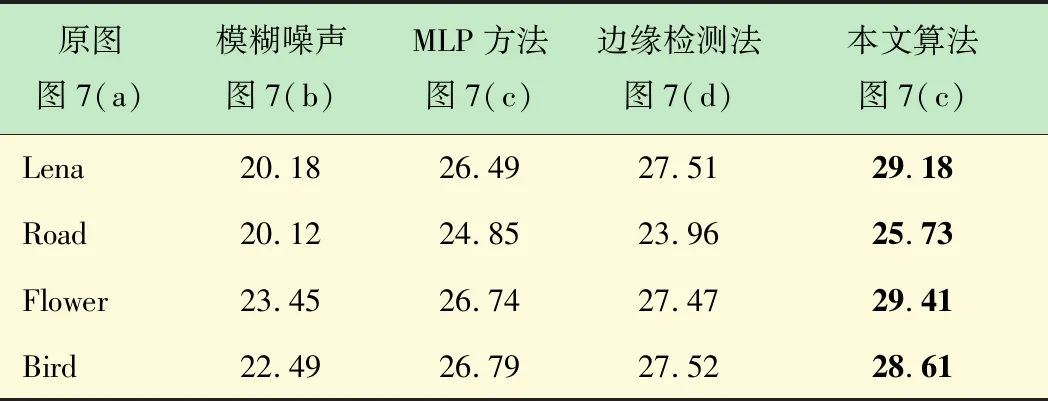
表1 不同方法的PSNR值 dB
4 结 语
本文提出一种基于梯度域和深度学习的图像运动模糊盲去除算法,将CNN可以学习图像自身特征的性能用于去模糊的问题中,设计了一个有效的CNN结构;将图像梯度域预处理与CNN网络相结合的方法,避免直接用CNN网络而忽略图像先验信息的缺点。实验表明,本文方法不仅能有效去除图像运动模糊,同时很好地保留了图像细节,放大噪声不明显,较好地抑制了振铃效应的产生。
