履带式爬壁机器人优化设计*
2019-07-02曹立超刘晓光蒋晓明周勇
曹立超 刘晓光 蒋晓明 周勇
履带式爬壁机器人优化设计*
曹立超 刘晓光 蒋晓明 周勇
(广东省智能制造研究所 广东省现代控制技术重点实验室)
针对履带式爬壁机器人在运行过程中容易出现履带脱离、磁铁损伤、吸附不稳定等问题,通过优化履带结构、改善传动装置、改进机器人本体结构,提出了履带式爬壁机器人优化设计方案。经仿真结果和样机实验测试验证,该爬壁机器人负载能力强、稳定性好、运行灵活性好。
爬壁机器人;永磁吸附;履带
0 引言
爬壁机器人作为特种机器人,可以携带一定的工具设备,在玻璃幕墙清洗、船体外壁喷涂和除锈、石化罐体焊缝探伤、大型管道及高塔视频监测等场合代替人类更快、更好地完成作业任务[1-4]。
目前研究较多的爬壁机器人是履带式磁吸附爬壁机器人。胡绍杰[5]等研究了履带式爬壁机器人磁吸附单元的优化问题,但只是增加了磁吸附力,没有解决磁铁断裂的问题;王瑞[6]等对三角履带爬壁机器人进行模拟仿真,该机器人虽然实现了越障功能,但稳定性较差、负载能力不足;熊雕[7]等对履带式爬壁机器人进行受力分析与稳定性仿真研究,但没有深入研究履带式爬壁机器人稳定可靠运行的条件。
履带式爬壁机器人在连续运行过程中会出现履带脱离、吸附不稳定、磁铁损坏等问题。为此,本文通过优化履带结构、改善传动装置、改进机器人本体结构,实现履带式爬壁机器人的优化设计方案并进行实验验证。
1 爬壁机器人优化
1.1 履带易脱离优化
履带式爬壁机器人的吸附单元(磁铁)全部集中在双侧履带上[8],机器人在实际运行过程中,双侧履带和机器人本体属于2个单独机构。爬壁机器人需要长时间连续在倾斜角为90°~180°的立面上工作,其两侧的履带需要承受机器人本体和负载的重量(一般在1000 N以上)。当机器人在壁面上沿着水平方向运行时(如图1所示),可能会发生履带与机器人本体脱离的现象,如图2所示。
图1 机器人沿着水平方向运行

图2 履带脱离机器人现象
目前常见的履带式爬壁机器人基本采用链轮链条传动结构或同步带同步轮传动结构。这种结构在运行一段时间(<0.5 h)后,链轮(同步轮)常常会脱离链条(同步带)结构。轻者只是机器人停止工作,无法脱离壁面;重者会导致机器人从运行壁面上脱落,发生事故。针对以上问题,本文提出一种新式履带结构,如图3所示。

图3 新式履带结构
原有履带采用链轮和链条结构,齿形比较小,齿数较多,连续运行时链轮可能脱离。优化为图3所示新式履带结构后,齿数变少,齿形变大,履带张紧后齿轮较难从履带中脱离。另外在齿轮外增加1个挡片,也可以防止履带从齿轮中脱离。这样在双重防护下,解决了爬行机器人履带脱离问题。经测试,机器人连续运行1 h没有发生履带脱离现象。
1.2 永磁铁断裂磨损优化
履带式爬壁机器人采用独立不连续分布的长条状磁铁提供吸附力,如图4所示。永磁铁属于硬脆性材料,被吸附壁面刚度较大,两者接触吸附时会产生较大冲击力,容易损坏永磁铁。

图4 独立不连续分布的永磁铁履带
针对以上问题,本文提出整体式橡胶履带结构,如图5所示。履带采用橡胶一体加工成型,在保证足够强度的前提下,既减轻机器人的重量,还增大机器人与吸附壁面之间的摩擦力,保证机器人稳定行走。

图5 整体式橡胶履带结构
由图5可看到,永磁铁交替布置在橡胶履带中间,且永磁铁高度略小于橡胶高度(约0.5 mm)。当机器人吸附在壁面上工作时,在磁吸附力的作用下磁铁周围的橡胶发生变形。利用橡胶的减震性,使永磁铁和壁面间的刚性接触转变为柔性接触,在保证足够磁吸附力的同时保护磁铁不发生断裂
1.3 机器人吸附稳定可靠性优化
爬壁机器人要保证稳定可靠地吸附在壁面,需要有足够的磁吸附力。与此同时,磁吸附力增加会加大机器人运行时的摩擦力;摩擦力过大需要增大电机驱动力;增大电机驱动力需要使用更大的电机与减速器,加大了机器人整体重量,需要更大的磁吸附力才能稳定可靠地吸附在壁面上。吸附力(摩擦力)、驱动力和自重载荷3大矛盾体的协调设计是机器人稳定可靠吸附的关键。
机器人在垂直壁面(钢)上的受力模型如图6所示。
当机器人静止吸附在壁面上时,满足式(1)的静力平衡。
=
+1=(1)
F−永磁铁对壁面的吸附力 N−壁面对机器人的支持力 f−机器人对壁面的摩擦力 G−机器人重力 v −机器人前进速度 F1−机器人前进时的动力
图6 爬壁机器人受力模型
当机器人在壁面上运行时,橡胶和钢之间的摩擦系数变为滚动摩擦系数,取0.1左右。因此,为使机器人在壁面上稳定吸附行走,磁吸附力要达到重力的10倍。本文设计的爬壁机器人自重为370 N,载重为350 N,总重量为720 N。机器人的磁吸附力要达到7200 N才能保证其稳定可靠运行。
采用电磁分析软件flux对单块磁铁的电磁力进行分析。磁铁外形尺寸为60 mm×20 mm×10 mm,钢板厚度为10 mm;已知钕铁硼的回复磁导率为1.05,剩磁为1.202 T。flux建模示意图如图7所示。
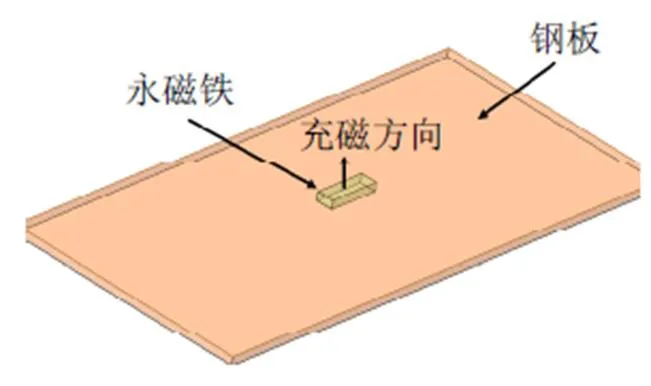
图7 flux建模示意图
模拟得到磁铁吸附力与被吸附钢板间间隙关系曲线图如图8所示。
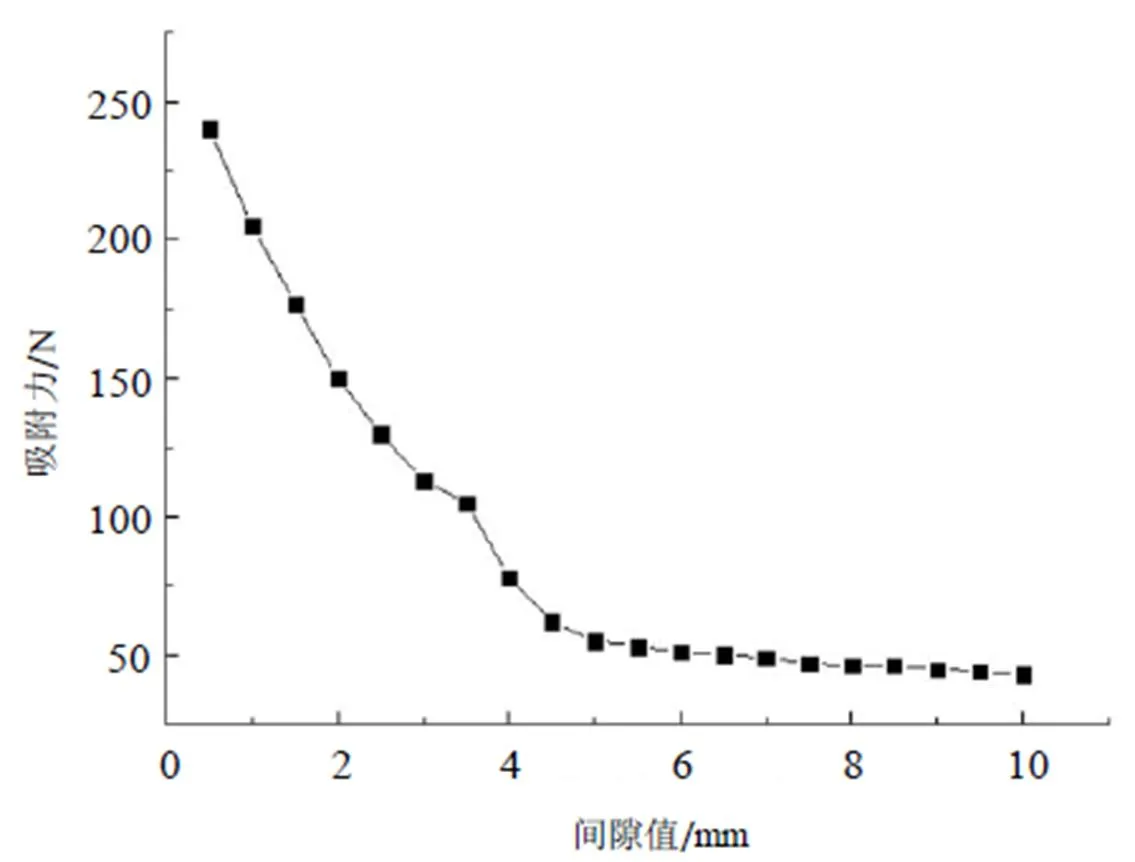
图8 磁吸附力与间隙关系示意图
由图8可知:随着间隙值增加,磁铁的磁吸附力以指数衰减形式急剧下降。因此,为增加磁铁的磁吸附力,应尽可能减少磁铁与壁面间的接触距离。本文设计的履带橡胶垫的高度约为0.5 mm,磁吸附力约为240 N,因此需要30块磁铁同时吸附(磁吸附力大于7200 N)才能保证机器人稳定行走。本文机器人采用双履带结构,长度为550 mm,单侧同时有16块磁铁吸附在壁面,则整个履带的吸附力达到7680 N(2×16×240),满足爬壁机器人稳定可靠吸附的需要。
为了保证机器人运行稳定可靠,在机器人底部设计了带有万向滚珠的辅助吸附装置,如图9所示。

图9 辅助吸附装置
从图9辅助吸附装置的安装布置可以看出,圆形的辅助吸盘分散布置在机器人底部,每1个辅助吸盘四周分布着几个万向滚珠。万向滚珠的工作高度距离吸附壁面约0.5 mm,吸盘距离壁面为0.8 mm~1.0 mm。这样当机器人吸附在壁面上时,在几个辅助吸盘对壁面的吸附力作用下,整个机构会紧靠壁面,万向滚珠基本接触到壁面。同时由于吸盘略高于滚珠,在滚珠的支撑下,吸盘不会吸附在壁面上,保证运行的灵活性。优化设计得到的履带式爬壁机器人整体结构如图10所示。
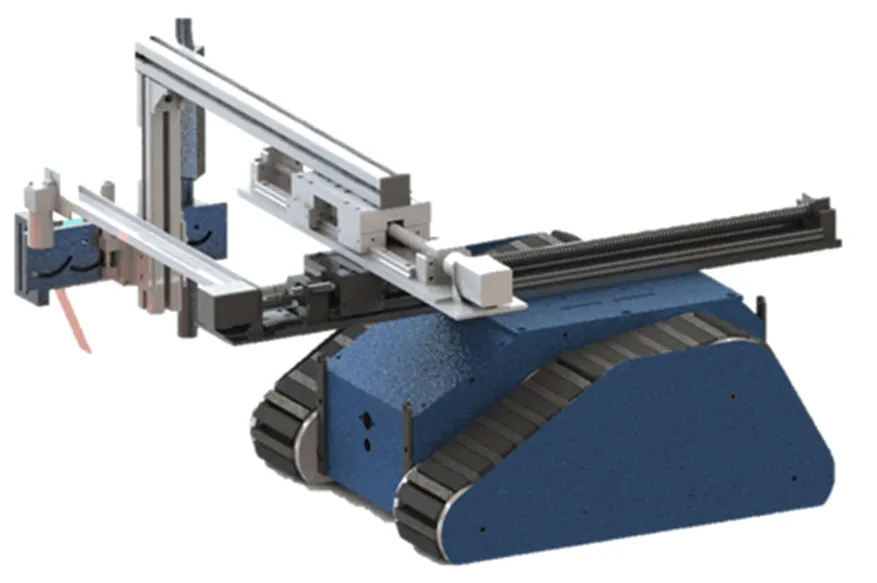
图10 履带式爬壁机器人整体结构
2 实验验证
2.1 仿真结果分析
为验证方案可行性,对爬壁机器人的运行过程进行仿真分析。在SolidWorks建立爬壁机器人的模型,并将其导入ADAMS;对各零部件的材料属性进行设置并添加相应的约束关系;设置重力等外部环境,如图11所示。

图11 爬壁机器人仿真模型
在爬壁机器人两侧履带上分别添加接触力,并根据钢与橡胶的摩擦系数,设置静摩擦系数为0.35,滚动摩擦系数为0.1。根据计算结果,设置1个垂直壁面向里的作用力7680 N。在两侧主动轮上添加驱动,仿真时间设置为300 s,运行速度与实际保持一致10 mm/s,仿真结果如图12所示。

图12 仿真结果
由图12(a)可以看出,机器人在运行过程中较平稳,速度基本保持稳定;从图12(b)可以看出,静摩擦力基本与系统重力一致(爬壁机器人系统重量约为 660 N),在爬壁机器人运行开始和结束时有突变,但变化较小。
2.2 实测结果分析
对本文设计的履带式爬壁机器人进行实际测试,机器人无负载和搭载设备在壁面上进行横向和纵向移动测试,测试结果如图13所示。
由图13(a)和图13(b)可以看出,爬壁机器人在实验壁面上无论横向还是纵向,均可以稳定可靠运行。改进后的爬壁机器人在连续行走过程中没有出现抖动、打滑或从壁面上脱落的现象,也没有发生履带脱离、吸附磁铁损坏的现象。
由图13(c)和图13(d)可以看出,在爬壁机器人上安装1套十字滑台系统,末端搭载工作设备,设备总重量为300 N。机器人搭载300 N重的设备在壁面上行走时,吸附稳定可靠、运行平稳。

图13 测试结果
3 结论
本文针对现有的履带式磁吸附爬壁机器人存在的问题,提出一种履带式爬壁机器人优化设计方案。
1)通过优化机器人履带结构,解决了履带式机器人容易出现履带脱离、吸附磁铁容易碎裂的问题;
2)通过模拟及仿真,计算得到机器人稳定可靠行走需要的磁吸附力;
3)经仿真结果和样机实验测试验证,优化设计的爬壁机器人负载能力强、运行灵活性好,未来可以搭载多种设备完成工作。
[1] 付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008, 25(4):1-4.
[2] 闫久江,赵西振,左干,等.爬壁机器人研究现状与技术应用分析[J].机械研究与应用,2015,28(3):52-54,58.
[3] Jeong Jae Hoon, Lee Dong Heon, Kim Min, et al. The study of the electromagnetic robot with a four wheel drive and applied I-PID system[J]. Journal of Electrical Engineering and Technology, 2017,12(4): 1634-1640.
[4] 塔月月.轮式爬壁机器人磁吸附性能及磁力控制研究[D]. 哈尔滨:东北石油大学, 2012.
[5] 胡绍杰,彭如恕,何凯,等.履带式爬壁机器人磁吸附单元优化设计与实验研究[J].机械与电子,2018,36(1):69-74.
[6] 王瑞,高荣慧,翟华.三角履带爬壁机器人越障动力学建模与仿真[J].机械设计与制造,2017(增刊):205-208.
[7] 熊雕,刘玉良.履带式爬壁机器人受力分析与稳定性仿真研究[J].机电工程,2015,32(7):929-932,937.
[8] 方毅.永磁吸附爬壁机器人设计及性能分析[D].武汉:武汉科技大学,2015.
Optimization Design of Tracked Wall-Climbing Robot
Cao Licao Liu Xiaoguang Jiang Xiaoming Zhou Yong
(Guangdong Institute of Intelligent Manufacturing, Guangdong Key Laboratory of Modern Control Technology)
At present, tracked wall-climbing robots are prone to problems such as track shedding, magnet damage, and unstable adsorption in the process of performing tasks. This situation easily causes the robot to fall from the work area. In view of the above problems, this paper has set up a wall-climbing robot by optimizing the track structure, improving the transmission device and improving the structure of the robot. Based on the simulation results and the prototype test, the optimized wall-climbing robot has strong load capacity, good stability and good movement flexibility. In the future, it can carry various equipment to complete the task.
Wall Climbing Robot; Permanent Magnet Adsorption; Track
曹立超,男,1990年生,硕士研究生,主要研究方向:自动化智能装备、爬壁机器人系统。E-mail: lzclc521@163.com
广东省科技计划项目(2016B090927008,2016A030310309 2017A050506036,2014B040404063);广东省科学院能力建设专项(2017GDASCX-0015,2016GDASRC-0106,2017GDASCX-0848)。
