一种超声波电动机的两相驱动电路研究
2019-07-02万志坚张俊峰
万志坚,张俊峰
(1. 深圳职业技术学院,深圳 518055;2.哈尔滨工业大学深圳校区,深圳 518055)
0 引 言
超声波电动机驱动电源是超声波电动机工作的能量来源,电机所需的电压频率在20 kHz以上,电压幅值一般在100 V以上,是一种高频高压的电压信号,故需要专门设计。电机的驱动控制电路是超声波电动机性能的决定性因素之一。超声波电动机的驱动控制电路设计不好,将导致电机的工作效率低下,甚至不能正常工作。目前,超声波电动机用驱动控制器主要有直接数字式频率合成器(DDS)的驱动控制器和超声波电动机典型的驱动控制电路两种[1-5]。DDS技术原理相对较复杂,开发难度较大,不利于产品化。相比而言,超声波电动机典型的驱动控制电路使用较为广泛,它可以根据特定的超声波电动机进行针对性的设计,从而可以做到较紧凑、电压信号匹配性能好。不同类型的超声波电动机,其驱动电路一般有所不同,某些种类的超声波电动机需要正弦、余弦两路甚至多路信号来进行驱动。本文设计了一种体积较紧凑、性能较稳定的超声波电动机驱动控制器,实现了对面内弯纵复合模态的直线超声波电动机的驱动。
1 超声波电动机驱动的总体方案
超声波电动机驱动电源的总体方案设计如图1 所示,包括PC上位机、电源电路、主控电路、驱动电路、超声波电动机(USM)、光电编码器等。其中,主控电路由STM32F103芯片和其外围电路构成。驱动电路依次包括取反升压电路、开关管驱动电路、逆变放大电路、匹配电路4个模块。

图1 超声波电动机驱动总体方案设计
在上述方案中,首先在上位机中通过软件按照要求设置好信号的相关参数,诸如信号的频率和相位、占空比等;随后主控芯片根据这些参数设置输出后续所需的两路PWM波,再通过电路完成直流到交流的逆变、电压信号的升压、电路与超声波电动机的匹配等环节,输出两路高频高压电压信号(正弦、余弦信号),以实现对超声波电动机的驱动。本文根据所设计的面内弯纵复合模态直线超声波电动机的驱动及实验要求,驱动信号的频率调节范围为20~50 kHz,电压幅值调节范围为100~300 V,两相电压信号相位可灵活调节。
电机在工作过程中,光电编码器可以采集到位置和速度信息,并反馈给主控制芯片,随后可通过控制程序进行电机的位置和速度调节。上位机通过串口与主控芯片相连,其功能主要包括PWM波参数设定、电机运动状态信息采集、电机运动的正反控制等。
2 电源电路设计
超声波电动机驱动的电源电路设计框图如图2所示。电源电路分两路输出:一路的输出电压为12V,提供给主控电路;另一路的输出电压在1.25~22 V之间,并且是可调的,以满足逆变电路的需要。
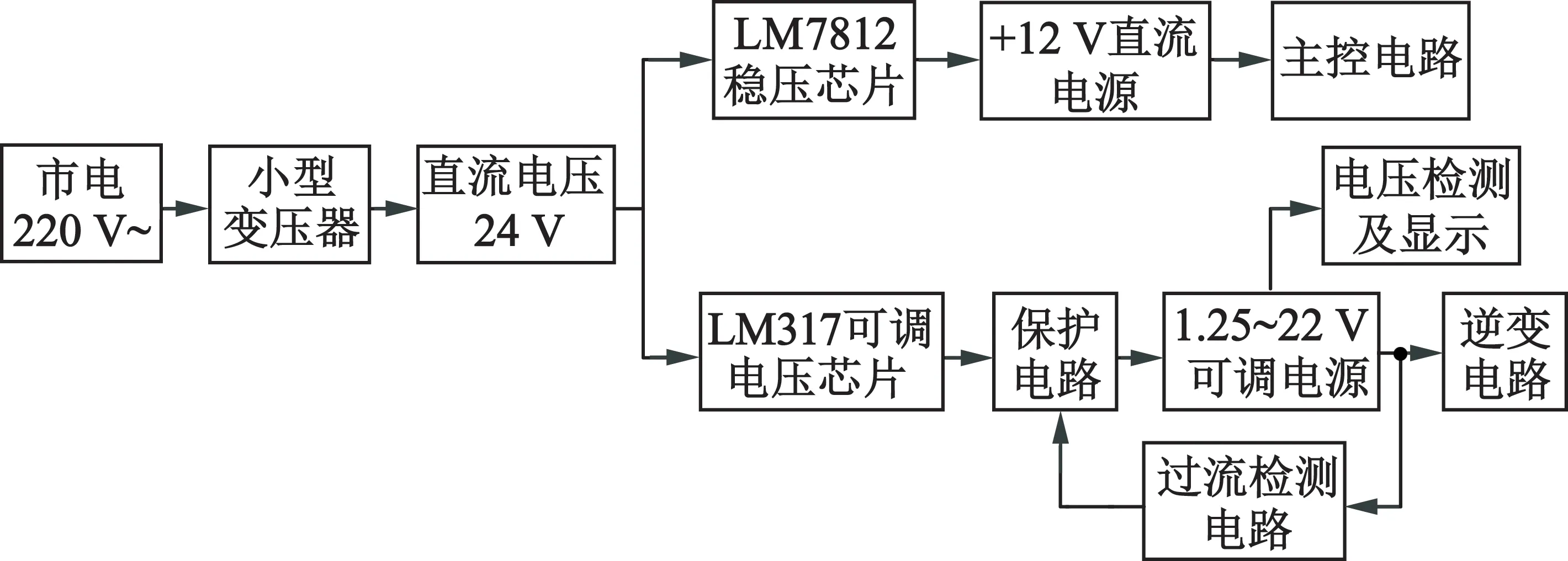
图2 电源电路设计框图
首先,通过一个小型变压器将220 V市电转变为24 V直流电,并分为两个支路输出。其中一个支路利用LM7812把24 V输入转换为+12 V输出(供给主控电路);同时,利用LM7805将+12 V电压转换为+5 V输出电压,给电源电路中的STC12C5A60S芯片供电。在另一支路中,利用可调输出稳压芯片LM317将+24 V直流电转换为+1.25 V至+22 V电压信号;同时,采用STC12C5A60S芯片的模数转换的采样来进行电压信号的测定;利用双电压比较器LM393实现电路的过流检测,同时结合继电器的使用,对电路进行过流保护。电源电路图如图3所示。


图3 电源电路图
3 主控电路设计
主控芯片STM32及辅助电路如图4所示,包括核心处理芯片STM32F103、主控电源子模块、通信子模块、程序下载子模块等。主控电路是驱动电路的关键部分,它负责生成PWM波,并与上位机进行通信。另外,主控电路还有电机动子的速度测试、位置控制等功能。

图4 主控芯片STM32及辅助电路
(1)主控电路电源子模块:这里的电源子模块是主控电路的动力来源,为满足主控电路中不同元器件的供电需要,需要分别提供3.3 V,5 V,12 V等三种供电电压。主控芯片的供电电压为3.3 V直流,此处依次采用了7805芯片和LM1117芯片进行电压转换:先将12 V直流电压(主电源电路提供)转换成5 V直流电压,再将5 V直流电压转换成3.3 V直流电压。同时,预留的5 V直流电输出是后续驱动电路所需要的。电路图如图5所示。

图5 主控电路的电源子模块
(2)程序下载子模块:程序下载模块是为了后续功能拓展研究的需要,可以根据功能拓展的需要编写程序并下载到芯片STM32中。如图6所示,此模块使用了JTAG接口。因为主控芯片STM32上的JTAG、SWD为共同使用的接口,所以可以在JTAG接口上通过SWD模式进行程序下载等操作。

图6 程序下载模块电路图
(3)通信模块:通信模块采用了RS-485接口技术实现主控芯片与上位机之间的通信。RS-485需要进行电平转换才能与主控芯片进行相连。这里使用了MAX485来转换电平,它采用5 V直流电压供电、半双工通信模式、传输速率最高为2.5 Mbit/s。电路如图7所示。

图7 通信模块电路图
(4)光耦隔离电路:为了超声波电动机控制的需要,在电机工作过程中,光电编码器、限位开关等器件需要发送脉冲信号给主控芯片STM32。光耦隔离电路设计在脉冲器件与主控芯片之间,电路如图8所示,它可以减少干扰和进行信号整形。光耦由发光二极管与光敏元件组成,它是光耦隔离电路的关键元件,这里采用了PC817光耦元件。

图8 光耦隔离模块电路图
4 驱动电路设计
4.1 取反升压电路设计
驱动电路有两支并列的支路,驱动电路中每一支逆变电路都需要两路PWM波驱动,并且两路PWM波需为互补波;另外,主控芯片输出的PWM波的电压为3.3 V,而逆变电路开关管的驱动电压为5 V。所以本电路采用了主控芯片STM32和51芯片( STC12C5201AD)相结合的方式实现了取反升压。在驱动电路工作时,主控芯片STM32发出两路可调制的PWM波(3.3 V),对于每一路PWM波,利用51芯片的外部中断将每一路PWM波转化为互补的两路PWM波,同时输出5 V高电平,连接开关管驱动电路。取反升压电路图如图9所示。

图9 取反升压电路图
4.2 逆变电路设计
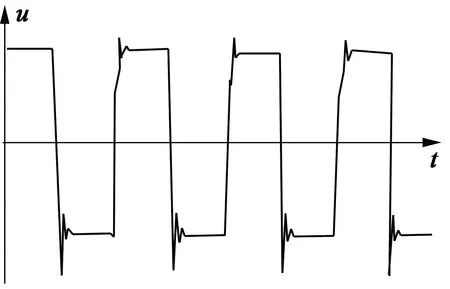
所述的超声波电动机驱动需要高频高压的正弦、余弦信号,所以需要利用逆变电路将低压直流电(由主控电源子模块提供)逆变成高压交流电。这里采用了全桥式逆变电路。如图10所示,逆变放大电路主要由4个开关管和1个变压器组成。在互补的两路PWM波信号的作用下,开关管1、3与2、4轮流导通,实现直流到交流的转换,然后再利用变压器进行升压,得到后续所需的高频率、高幅值的方波电压。

图10 逆变电路图
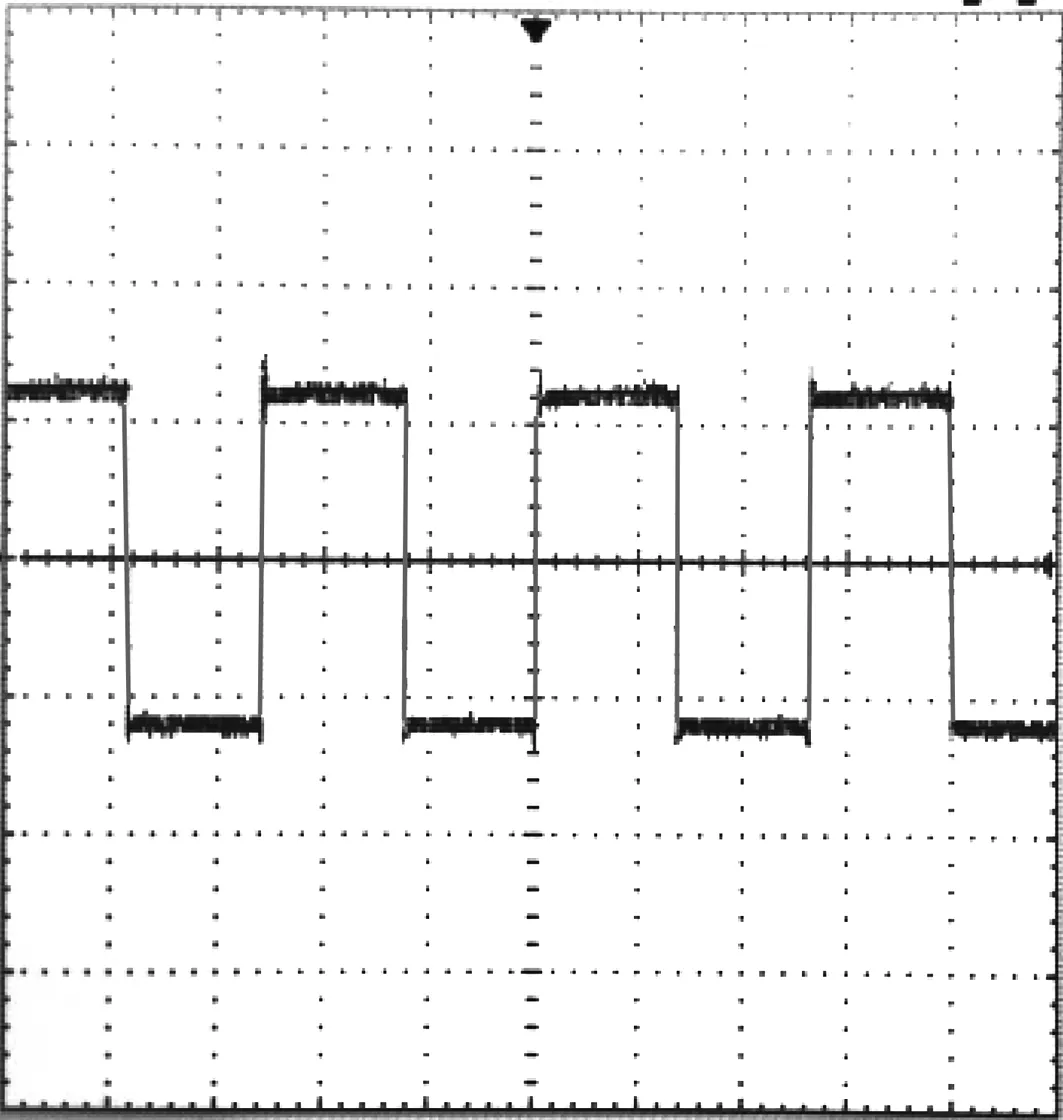
上述电路工作时,开关管在高频情况下快速通断。为了避免开关管快速通断而损坏,这里设计了开关管的驱动电路,如图11所示。本文采用IR2184S芯片作为开关管驱动电路的核心器件。由于开关管驱动电路能在极短的时间内产生大电流,使得栅极和源极之间在极短的时间内达到所要求的电压,从而消除电压信号在由低电平变为高电平时的高频率振荡。同时,开关管驱动电路还需要保障电压的稳定性。有、无驱动电路的开关管输出信号如图12所示,图12(a)为无驱动电路时的输出信号,图12(b)为有驱动电路时的输出信号。可以明显看出,有驱动电路的输出信号改善了上升沿的高频振荡。

图11 开关管驱动电路图

(a) 无驱动电路

(b) 有驱动电路
4.3 高频脉冲变压器的设计
4.3.1 变压器设计
上述逆变电路获得了电压为15 V的高频方波,由于超声波电动机的驱动电压幅值通常在100 V以上,因此需要对信号进行放大。为此,本文采用AP法设计了一个小功率的高频脉冲变压器,由于篇幅所限,在此不再详述。变压器的参数设定如表1所示,变压器设计结果如表2所示。需要说明是,由于逆变电路开关管的交替导通,变压器输出电压值为400 V/2=200 V。

表1 变压器性能参数

表2 变压器设计参数
4.3.2 吸收电路
根据上述设计制作的变压器,可能会因为变压器的绕组问题而出现漏感。在这种情况下,变压器工作时,在开关管通、断的瞬间将出现电压尖峰。电压尖峰会导致MOSFET管发热甚至烧坏。为了解决这个问题,在变压器输入侧和输出侧各连接一个电容元件,这样可以有效地吸收电压尖峰,形成尖峰电压的吸收电路。
图13为输出信号对比。图13(a)为无吸收电路的输出信号,图13(b)为有吸收电路的输出信号。很明显,吸收电路消除了电压尖峰。
(a) 无吸收电路

(b) 有吸收电路
4.4 匹配电路
超声波电动机的典型驱动电路中一般都会设计匹配电路[6]。原因包括两个方面:一方面,超声波电动机的定子是电容性的,会有无功耗损率,为了降低无功耗损率,在驱动电路中就需要设计匹配电路,进行阻抗匹配;另一方面,由于逆变电路采用开关管技术,信号中会有比较多的高频率杂波。由于超声波电动机是依靠定子的特定振动模态工作的,而高频杂波有可能会激发出定子的无关模态,从而使超声波电动机的性能下降,甚至不能工作。阻抗匹配则可以有效地过滤掉高频率的杂波,从而保证超声波电动机所需的特定频率信号。这里选用了串联电感实现超声波电动机阻抗匹配[7-9]。

图14 超声波电动机定子的等效电学模型
图14为超声波电动机定子的等效电学模型[6-7]。其中,Lm为电机等效电感;Rm为电机等效电阻;Cm为电机等效电容,Cd为电路中的夹持电容。假定电机在理想谐振状态下工作,此时,ωmLm=1/(ωmCm),电机等效电路中RCL串联支路仅存在电阻R。在串联匹配电路中,设串联电感为L,则系统的阻抗:
(1)
为了使系统阻抗Z呈现纯阻抗,有:
(2)
串联电感L:
(3)
其中一个支路的串联电感匹配电路如图15所示,其中虚线框内为超声波电动机的等效电路,在实际中,可以根据计算结果选取适当的电感值,以获得所需的信号波形。

图15 支路串联电感匹配电路
5 实验平台搭建
5.1 超声波电动机实验平台组成
如图16所示,实验平台包括PC机、电源模块、驱动模块、超声波电动机样机、示波器、压力传感器等组成。其中,超声波电动机样机为面内弯纵复合模态的直线超声微电机。
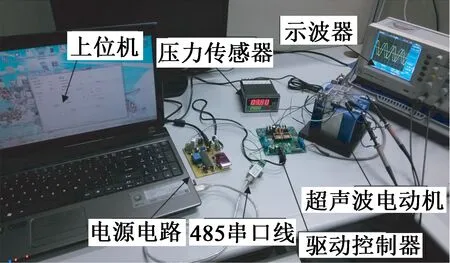
图16 超声波电动机实验平台
根据前述超声波电动机驱动电路原理,制作的电路板如图17和图18所示。图17的电源电路板为整个驱动控制系统提供电力。图18为超声波电动机驱动控制电路板,它集成了主控电路、取反升压电路、开关管电路、逆变升压电路、匹配电路等模块,产生电机所需要的高频高压的正弦、余弦两相驱动信号,驱动超声波电动机运行。

图17 电源电路板

图18 超声波电动机驱动控制电路板
5.2 驱动信号调试
根据实验所用的超声波电动机电压信号要求,驱动电压频率约为38.43 kHz,电压幅值需为100 V至200 V可调,电压信号的相位可调。图19为主控芯片STM32输出的两路PWM信号,频率为38.43 kHz,相位差为90°,电压为3.3 V。图20为逆变电路输出的A相、B相两路信号,电压幅值12 V,相位差为90°,其他参数同前。图21为驱动电路的最终输出的正弦、余弦信号,电压幅值为200 V,其他参数同前。经过调试,所设计的超声波电动机驱动的各模块运行正常,整个驱动系统运行稳定,输出信号波形好,杂波少,完全满足了面内弯纵复合模态直线超声波电动机的工作要求,电机工作正常。

图19 主控芯片STM32输出PWM波
(a) A相信号

(b) B相信号

图21 驱动电路的最终输出信号
6 结 语
超声波电动机驱动所需的信号频率较高(超声波频率),电压也较高,一般要求峰峰值在100 V以上。为了超声波电动机的正常工作,需要设计超声波电动机专用的驱动电路。电路设计如下:
(1) 需要设计电源电路,将220 V市电通过变压等过程得到24 V直流电,然后再次变压,并分成两路电压输出,分别为主控电路和逆变电路供电。
(2) 在主控电路中,STM32芯片产生两路PWM波提供给取反升压电路。利用51芯片的外部中断将每一路PWM波转化为互补的两路PWM波。
(3)在互补的两路PWM波信号的作用下,利用4个开关管两两轮流导通,实现直流到交流的转换,然后再利用变压器进行升压,得到后续所需的高频率、高幅值的方波电压。
(4)结合超声波电动机的负载特性,通过匹配电路,实现了面内弯纵复合模态的直线超声微电机的正弦、余弦两相驱动。
该驱动电路也可用于其他需要两相驱动的超声波电动机。为了后续的超声波电动机控制系统的研究,在主控电路中还设计了程序下载模块、通信模块、光耦隔离电路等。
