三浮陀螺磁悬浮系统发展综述
2019-06-26唐哲陈志豪
唐哲 陈志豪
摘 要:磁悬浮技术应用于机电陀螺直接改善了陀螺输出轴的支撑环境,消除了浮子组件与陀螺壳体间的机械接触,稳定了浮子质心位置,进而大幅度提高了液浮陀螺精度,优良的磁悬浮技术可使陀螺仪输出轴上的干扰力矩降低10倍以上。三浮陀螺磁悬浮技术分为有源磁悬浮和无源磁悬浮两类,文章在介绍磁悬浮系统的基础上,较为完整地介绍了三浮陀螺及其磁悬浮系统的发展历程。
关键词:三浮陀螺;无源磁悬浮;有源磁悬浮
三浮陀螺仪是单自由度液浮积分陀螺的发展与改进,采用动压气浮轴承电机代替滚珠轴承电机,利用磁悬浮技术来消除机械摩擦力矩,提高了陀螺仪的寿命和精度。因为其浮筒采用了液浮技术、陀螺马达采用动压气浮技术、输出轴采用磁悬浮技术,所以简称为三浮陀螺。三浮陀螺精度高,通常应用于战略武器、载人航天、星空探测等对陀螺仪精度要求非常高的领域[1]。按控制方式磁悬浮系统分为有源磁悬浮和无源磁悬浮两类,本文对磁悬浮系统的发展历程进行了介绍。
1 三浮陀螺发展历程
惯性技术与惯性元件的发展是相辅相成的,人类对陀螺仪的应用开启了惯性技术的发展历史。无论任何应用状态和形式下的陀螺仪,决定其系统精度的关键因素都是陀螺漂移,而陀螺漂移由有害力矩产生,所以降低支承轴的摩擦力矩成为提高陀螺仪精度的关键。可以说传统陀螺仪表的研制发展过程,就是想方设法减少其有害力矩的过程。为了降低轴承干扰力矩,支承技术不断改进,历经数十年发展,已从滚珠轴承发展为液浮、气浮、静压液浮、挠性、磁悬浮、静电悬浮等多种支承方式,就目前技术成熟度来看,精度最高并且应用最广的还是液浮支承的惯性元件[2]。
20世纪50年代,美国麻省理工学院德雷帕学院[3]采用液浮支承,成功研制了单自由度液浮陀螺,有效降低了支承引起的摩擦力矩,使陀螺漂移达到了惯性级要求。1950年5月,美国北美航空公司奥托奈蒂克斯分公司成功研制了第一套纯惯性导航系统XN-1,并在C47飞机上进行了试飞。1956年,开始使用铍材料制造液浮陀螺的主要零件—浮筒,大大地提高了陀螺的稳定性。1958年,装备了液浮陀螺惯性导航系统的核潜艇,从珍珠港出发,穿越北极冰盖,最终到达美国波特兰港,历时21天。其中,穿越北极时以20海里的时速在水下潜航8 146海里,在即将到达目的地时潜艇浮出水面,经过测量,定位误差仅为20海里,表明液浮陀螺惯性导航系统技术已比较成熟。20世纪60年代初,液浮陀螺电机转子支承改用了气体自润滑动压轴承,与滚珠轴承相比,既减小了机械噪声,又大大地延长了陀螺的工作寿命。以美国为例,20世纪70年代初,三浮陀螺精度就已接近0.001(°)/h,20世纪70年代中期,为适应远程MX导弹需求研制的TGG型三浮陀螺仪精度达到了1.5×10-5(°)/h,该陀螺仪用于浮球平台上,使MX导弹的命中精度缩小到百米以内。另外,据称其第4代三浮陀螺仪(FGG)精度已达1.5×10-7(°)/h,系统定位精度可以提高到3 cm/h,系统运行时间可达1万小时,为最终实用型[4]。
2 磁悬浮系统技术
磁懸浮按控制方式分为有源磁悬浮和无源磁悬浮,有源磁悬浮是连续地或断续地测量物体的位置,通过伺服装置迅速地控制力场,使悬浮体稳定在允许的位置范围内。无源磁悬浮是通过调整磁悬浮的激磁电路参数来实现固有稳定。对于磁悬浮系统来说,无论是有源磁悬浮还是无源磁悬浮,所需的磁性元件是一致的,区别在于外接稳定电路。无源磁悬浮只需要外接几个调谐电容,即可依据自身性质实现系统稳定[5]。
2.1 无源磁悬浮技术
磁悬浮技术应用于陀螺仪的思想是20世纪五六十年代由美国德雷伯实验室首先提出并付诸实践的,在随后的20多年中,受当时电子技术发展的限制,仅对采用电容协调原理、结构简单的无源磁悬浮技术进行了研究,并广泛应用于各类战略领域。20世纪50年代末,美国的无源磁悬浮技术首先在北极星导弹用25IRIG液浮积分陀螺仪中得到应用,在用于Appollo计划的RI-1170捷联式陀螺中进一步应用,此外还有大力神ⅡC的轮盘木马惯导系统中采用无源磁悬浮支承的单自由度液浮陀螺,民兵Ⅱ、Ⅲ导弹的摆式积分陀螺加速度表中,检测质量采用无源磁悬浮系统支承,阿波罗登月舱用的16PIPA脉冲式加速度表中,检测质量采用无源锥形磁悬浮系统支承[6]。
2.2 有源磁悬浮技术
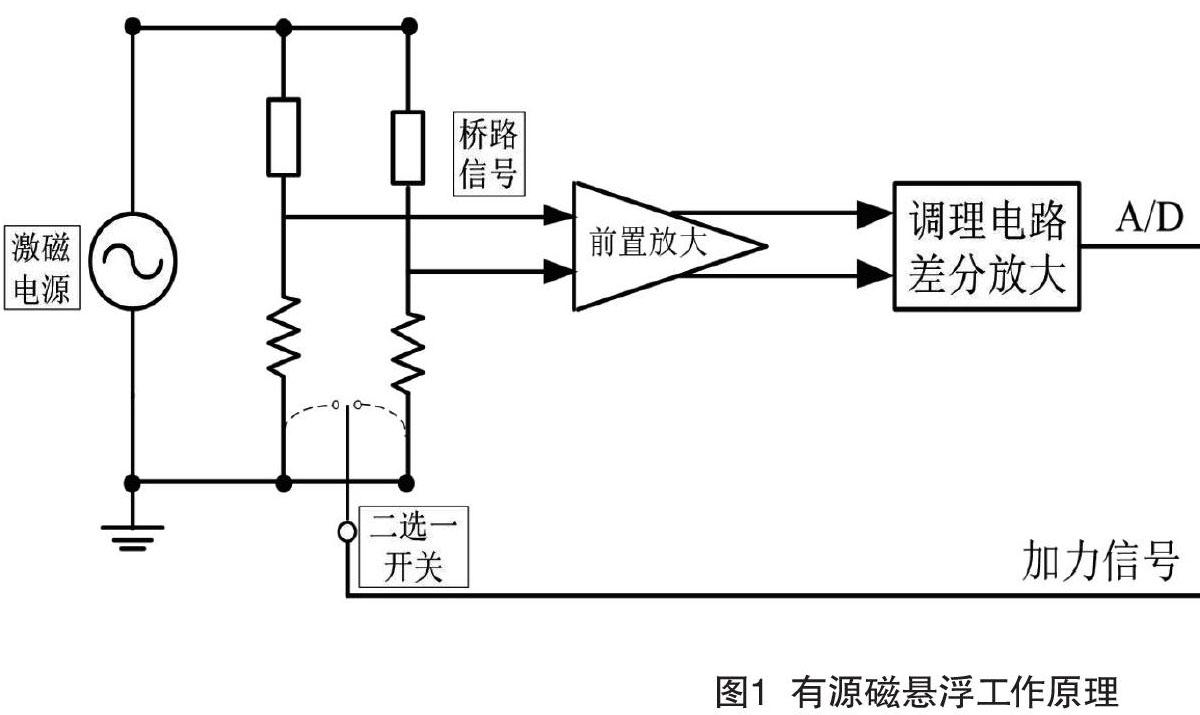
无源磁悬浮技术因其原理简单、体积小,不需要专门的附件设备,只要对悬浮电路进行合理的调整就能达到自动稳定的效果,但无源磁悬浮恢复力和刚度则有所损失,启动时长,功耗比较大。因此,自20世纪70年代开始,随着电子技术的发展和电路集成度的提高,国外开始研究有源磁悬浮。20世纪70年代末80年代初,美国的新一代积分陀螺TGG和比例积分器SFIR-J中首先采用了有源磁悬浮技术,使仪表精度达到了1.5×10-5(°)/h和1.5×10-6(°)/h。美国第3、4代三浮陀螺,在输出轴支承方面采用了时分式有源磁悬浮系统,应用结果表明该系统工作可靠,对提高仪表的性能起到了很好的作用。由此可见,有源磁悬浮更适于导弹、卫星等航天领域的三浮陀螺仪应用,尤其是随着当代数字集成电路的飞速发展,有源磁悬浮已成为高精度惯性仪表磁悬浮控制系统的主流技术方案,其研制应用能够进一步提高三浮陀螺精度和工作性能,从而满足新型号研制任务要求。时分式有源磁悬浮的工作原理如图1所示,硬件组成主要包括:浮子位置检测电路(L-R电桥),前置放大电路,真有效值转换电路,差分放大电路,A/D转换电路,DSP控制器,D/A转换电路,输出驱动电路。
我国的有源磁悬浮系统发展历程简述如下。20世纪80年代,基本弄清了磁悬浮和惯性仪表的工作原理和匹配调试方案。20世纪80年代初期,进行了独立式结构的相位反馈和幅值反馈磁悬浮研究,此种系统同一回路需要两套磁悬浮元件,一套为位移传感器,一套为力发生器,因而在小型化中受到很大限制。20世纪80年代中期,主要研究分时复用式直流幅值反馈有源磁悬浮系统,至20世纪90年代取得了一定的突破和应用。同期,基本掌握了三浮陀螺的机械加工、装配和调试技术。随后又讨论了交直流型、纯交流型、脉冲控制型等有源磁悬浮系统的设计与研究,并从三浮惯性仪表总体角度出发,研究了仪表有源磁悬浮系统的智能化数字控制及配表调试的有关理论和工程实现方法。邓忠武[5]从三浮陀螺仪的总体性能出发,主要对三浮陀螺有源磁悬浮系统的设计重点及设计方法进行了研究。梁慧群[6]从磁悬浮有害力矩产生的机理入手,从系统总体方案设计出发,在硬件和软件两方面给出了磁悬浮有害力矩测试仪的研究设计过程,为磁悬浮有害力矩的测试提供了一种技术途径。李德才等[7]基于有源磁悬浮系统的整体研究,提出了模糊控制和经典PID相结合的控制策略,并进行了MATLAB仿真研究,并提高了系统的鲁棒性。
3 结语
磁悬浮技术在三浮陀螺中的应用可以极大程度提高陀螺仪精度,以确保惯性平台的可靠性。本文总结了三浮陀螺及其磁悬浮系统的发展研制历程以及发展现状,重点介绍了有源磁悬浮系统的工作原理以及硬件组成部分,有源磁悬浮因其独特的优点称为目前研究和应用的重点。作者简介:唐哲(1994— ),男,陕西渭南人,硕士研究生;研究方向:惯性平台仪器仪表科学与技术。
[参考文献]
[1]吴辽.高精度三浮陀螺仪有源磁悬浮系统技术研究[D].北京:中航天科工第二研究院,2016.
[2]陆九元.惯性器件(上、下)[M].北京:中国宇航出版社,1990.
[3]DRAPER C S,W W.Inertial guidance[M].New York:Pergamon Press,1960.
[4]王巍.惯性技术研究现状及发展趋势[J].自动化学报,2013(6):723-729.
[5]邓忠武.三浮陀螺仪有源磁悬浮技术研究[D].哈尔滨:哈尔滨工业大学,2003.
[6]梁慧群.磁悬浮有害力矩测试仪的研究[D].长春:长春理工大学,2011.
[7]李德才,王智奇,曾元鉴,等.模糊控制理论在有源磁悬浮系统中的应用[J].中国惯性技术学报,2010(2):214-218.
