双磁吸附船用洗舱机器人
2019-06-26薛天琪谢智达姚屹洋
发明与创新·中学生 2019年6期
薛天琪 谢智达 姚屹洋
海運是大宗货物的首选运输方式,煤炭、矿石、粮食等都要通过远洋货船运输到世界各地。每当航次结束后,船舶都要进行货舱扫洗作业,尤其是拉煤、拉矿后改装粮食时,扫洗舱作业量十分巨大,全船动员要十几天甚至更长时间才能备舱完毕,到港后如果验舱通不过,损失将非常惨重。
船员海上洗舱面临巨大的风险,由于货舱通常都有二十几米高,货舱上部的清洗是高空作业,再加上海上作业受天气影响,船舶左右摇晃,清洗工作十分危险。
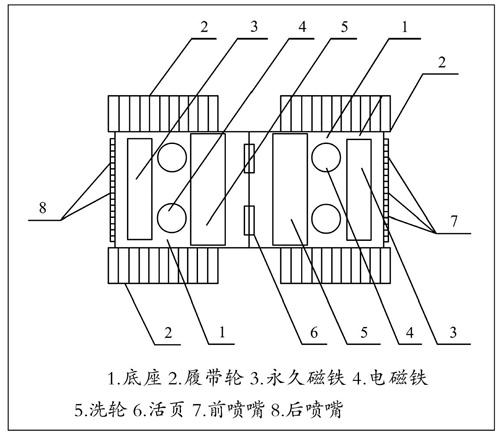
针对以上问题,我们设计了一种双磁吸附船用洗舱机器人,用于替代人工进行货舱高空清洗作业。其结构如右图所示。
该机器人由两个相同的电磁吸附清洗平台组成,中间用活动铰链连接,便于设备在爬行中适应凹凸不平的货舱结构。
机器人既能通过有线控制,又能用遥控器控制,行走速度、清洗刷转速都通过调速器调节。考虑到设备的可靠性和维护的便携性,本设备既可采用牵引电机,又可以采用无牵引电机。
此外,设备采用双电磁吸附,即在水平船舱内爬行采用永久磁铁吸附,在竖直船舱壁爬行采用永久磁铁和电磁铁共同吸附,同时使用带滚轮的电磁铁小车,使电磁铁与船壁间保持1~3mm的间距,以增大电磁吸附力,增大爬行的摩擦力。
自带的摄像头通过软件编程可实现智能控制,如通过喷头自动喷出高压水流等。
双磁吸附船用洗舱机器人设计合理,造价低,能全天候代替人工洗舱。