无人机航摄大比例尺地形图精度分析及优化措施
2019-06-26王海涛耿守民柴文博
王海涛,耿守民,李 锐,柴文博
(陕西水环境工程勘测设计研究院,陕西 西安 710018)
随着无人机低空摄影技术的不断发展和成熟,无人机航摄业务在实际生产中得到广泛应用。无人机低空摄影测量技术不仅应用于小比例尺地形图的测绘,还被应用于大比例尺地形图的测绘中。采用华鹞P310 无人机、大疆悟2 和精灵4 小型无人机先后完成了《神木县散岔水库工程可行性研究项目》1/1000地形图测量、《渭南市生态公园右岸水系扩大及景观提升工程项目》1/500 地形图测量、《神木市活鸡兔沟中鸡镇段防洪工程初步设计测量项目》1/1000 地形图测量、《凤翔县后河水库工程可行性研究报告测量项目》1/1000 地形图测量等多个测绘项目,本文结合已完成项目的具体情况来进行无人机航摄大比例尺地形图的精度分析及优化措施。
1 低空摄影飞行设备
1.1 华鹞P310 型无人机
该飞机属于混合翼无人机,可以垂直起降,目前主要用于正射影像测量,每架次飞行可完成1/1000 比例尺6 km2~8 km2航摄任务,每天可完成2~3 架次,适用于大面积航摄任务,其后期数据处理是通过工作站进行数据采集,内业采集技术性强,对采集人员业务要求高,对电脑配置也有一定要求。
1.2 大疆悟2、精灵4 系列无人机
大疆系列无人机体型小,携带方便,适合小面积航摄任务,目前主要用于倾斜摄影测量,全天作业可完成航摄任务如下:精灵4 可飞1/1000 比例尺地形图1.8 km2~2.2 km2,悟2 飞1/1000 比例尺地形图1.6 km2~2.0 km2。后期通过smart 3D 软件生成三维模型和正射影像,在三维模型上进行数据采集,正射影像上进行地物绘制,采集过程相对简单,对作业人员技术要求较低,外业人员都可以直接上手作业。smart 3D 软件建模同样对电脑配置有一定的要求。
综合比较以上两个系列无人机的作业模式,在作业效率方面各有千秋。华鹞P310 型无人机外业航摄效率高,能满足大面积任务航摄,但内业处理对人员、对设备要求高,想提高工作效率,有瓶颈限制;大疆系列无人机低空摄影测量外业效率低,只能满足小面积航摄任务,建议3 km2以下使用才会有较高经济效率,内业建模对电脑配置要求高,内业采集简单易上手。
2 无人机航摄大比例尺地形图精度的分析
影响航摄大比例尺地形图精度的因素主要来源于航片的畸变误差,像控点布设及测量误差,空三解算时的刺点误差,内业人员数据采集时由于人眼观测精度影响产生的“人差”,以及外业飞行质量引起的飞行pos 数据误差和影像误差。
2.1 华鹞P310 型无人机进行航摄大比例尺地形图精度分析
(1)神木市活鸡兔沟中鸡镇段防洪工程初步设计测量项目采用华鹞P310 型无人机进行航摄。该测区位于神木市活鸡兔沟中鸡镇,测区多为煤矿开采区,地形极为破碎,河道有常流水。成图比例尺为1/1000,航摄分辨率为6 cm,飞行航高465 m,成图面积为1.5 km2,布设像控点30 个。外业采集精度检测点42 个,通过比较计算得地形图测绘平面中误差为±0.17 m,高程中误差为±0.14 m。
(2)渭南市生态公园右岸水系扩大及景观提升工程测量采用无人机航摄完成1/500 地形图测绘,航摄分辨率为4 cm,飞行航高310 m,成图面积为3.9 km2,布设像控点56 个。外业采集精度检测点29 个,通过比较计算得地形图测绘平面中误差为±0.10m,高程中误差为±0.11m。
2.2 大疆型无人机进行航摄大比例尺地形图精度分析
(1)麟游县马家河水库工程可研阶段测量项目采用大疆悟2无人机进行航摄测绘。该项目位于麟游县九成宫镇马勺湾村马家河,测区属于山地地形,沟壑山地错综复杂,高程为850 m~1150 m 之间,比高为300 m,施测时正值夏季,两岸山坡树林茂密,周边耕地植被枝叶繁茂,布设像控点时对地表的植被进行清理,才可满足上空空旷,实地地形和密实的植被严重限制了像控点的布设。成图比例尺为1/1000,航摄分辨率为4.2 cm,飞行航高200 m,成图面积为0.76 km2,布设像控点16 个。外业采集精度检测点136 个,通过比较计算得地形图测绘平面中误差为±0.11 m,高程中误差为±0.13 m。
(2)凤翔县后河水库工程可行性研究报告测量项目航摄1/1000 地形图,该测区属山地地形,沟深240 多米,为保证沟底有足够分辨率,对测区进行分块飞行。成图面积2.2 km2,平均分辨率6 cm,飞行航高272 m,布设像控点20 个,外业采集精度检测点191 个,通过比较计算得地形图测绘平面中误差为±0.34 m,高程中误差为±0.21 m。
分析总结以上四个具体实例,得出以下统计,见表1。
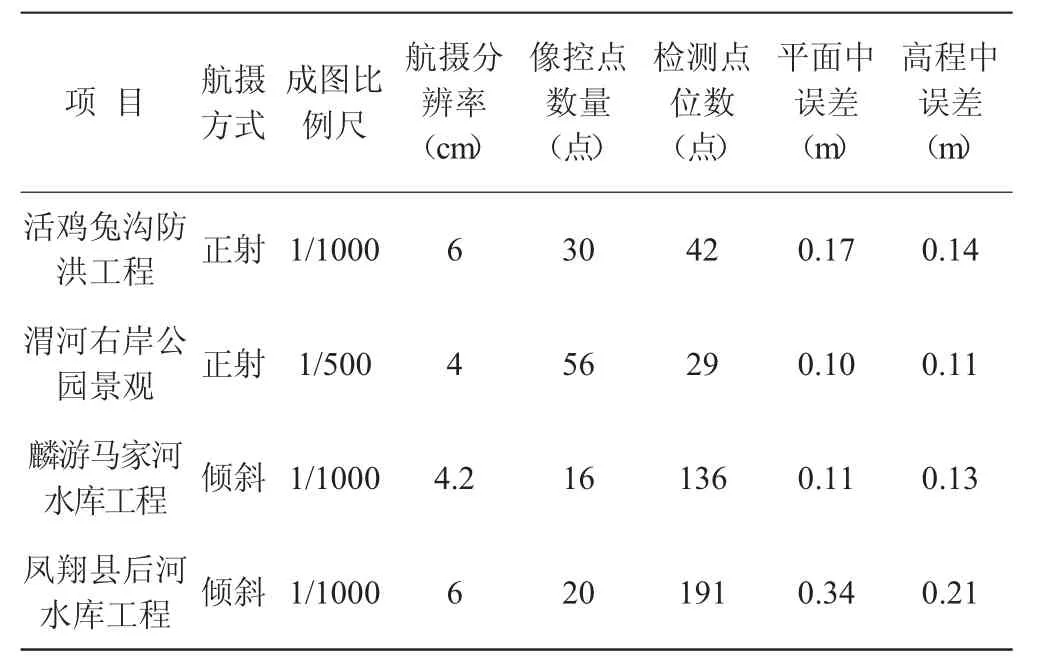
表1 不同项目低空摄影测量精度统计情况
在《低空数字航空摄影测量内业规范》CH/Z 3003-2010 中明确规定了低空摄影测量数字线画图(B 类)、数字正射影像图(B 类)的地物点对附近野外控制点的平面位置中误差和高程中误差,具体限差见表2。
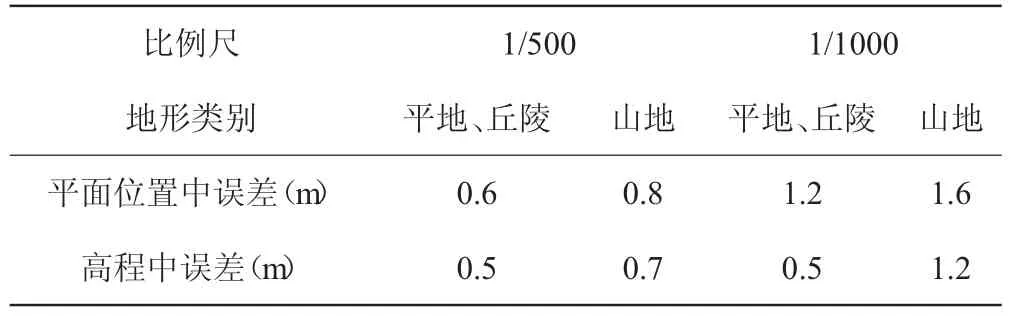
表2 平面位置中误差和高程中误差最小限差统计
结合表1 和表2 综合分析,无论是采用航摄正射影像还是采用倾斜摄影建模进行大比例尺地形图测绘,都能满足《低空数字航空摄影测量内业规范》CH/Z 3003-2010 中对无人机低空摄影测量平面和高程的限差要求。
3 无人机航摄大比例尺地形图精度优化措施
(1)尽量做到先像控后摄影,提高像控点精度。
像控点精度直接影响测图精度。像控点的精度一般包含两个方面,一是像控点的测量精度,二是像控点影像目标精度。前者误差主要来源于像控点测量,目前采用GPS-RTK 技术测量精度相对较高;后者主要是像控点布设大小及地表影像纹理的丰富程度,随着不同地形情况其精度影响有所不同,为了控制像控点影像目标精度,建议将像控点目标宽度选择在1~2 个最小分辨率,才能保证目标的清晰。
(2)定期检测相机,提高畸变参数精度。
无人机航摄采用的是非量测相机,影像畸变相对较大,且不稳定,建议牢固固定相机镜头,使其左右、前后不晃动,不伸缩,其次还有定期检校相机畸变参数,保证畸变参数精度。
(3)优化相机航摄参数,提高影像清晰度。
影像清晰度受飞机飞行速度、相机快门速度、光圈值和感光度、天气等因素影响,选择天气条件好的时间段设置合适的相机参数进行航摄。以索尼A7R2 型号的相机为例,在拍摄时照片的光圈值处于5~8 之间,照片质量相对较好,图像色彩信息比较丰富。
(4)及时更新升级空三加密软件,提高影像匹配质量。
新版本的空三加密处理软件其算法会更加合理,使影像匹配质量能进一步提高。
(5)工程设计直接基于三维模型,避免成果精度流失。
目前无人机倾斜摄影测量主要通过建立真实三维模型,然后在三维模型上用其他采集软件进行数据采集,最后再编辑生成线划图供设计人员使用。这样的作业方式不但程序复杂,容易让测绘成果精度流失,而且测绘成果呈现不够直观明了,没有充分发挥三维模型的作用。基于这种实际情况,建议将生成的三维模型直接提供设计人员,设计人员在三维模型上进行设计,这样既避免了航摄成果精度的流失,又使设计成果更加直观。三维模型上具有真实的坐标和高程,在其上直接进行工程设计,可以直接计算工程量。
4 结语
结合华鹞P310 无人机、大疆悟2 和精灵4 小型无人机在具体项目中的应用情况,分析不同类型无人机低空摄影技术在大比例尺地形图测绘中的精度情况,经分析各类型无人机在大比尺测绘中精度均满足规范要求。根据实践经验,总结出提高和保障大比尺地形图精度的措施,为无人机在大比尺地图的测量提供参考。
