基于GPS/BDS组合系统实现航测无人机动态定位
2019-06-26高晓库新勃白皓唐新庄
高晓,库新勃,白皓,唐新庄
(1.长安大学 地质工程与测绘学院,陕西 西安 710054;2.中国电力工程顾问集团西北电力设计院有限公司,陕西 西安 710032)
0 引 言
无人机航测系统具有机动性好、灵敏度高、成图速度快等优势,已成为航空摄影测量的重要方式[1-4].集差分全球卫星导航系统(GNSS)技术与惯性导航技术于一体的定位定向系统(POS)可直接获取航摄像片的线元素和角元素,根据共线方程即可重建地表立体模型,进而获取目标地物的几何和物理信息[5-6],因此,POS系统可显著减少航测内外业的工作量,提高航测工作效率,扩展无人机应用范围.
由于无人机载荷有限,常规实时动态(RTK)设备重量超过1 kg,无法直接应用无人机POS系统.动态后处理定位(PPK)技术是利用相位观测量进行事后动态定位的技术[7],该模式对无人机定位组件的功能性要求较低且精简了数据传输等模块,在保持RTK定位精度的基础上可有效减轻无人机定位组件的重量与体积. 随着软件算法的改进,后期作业中校正航片倾角的精准度较高,因此,动态定位的精度成为影响POS系统精度的主要原因[8].随着北斗卫星导航系统(BDS)的不断完善,尤其是北斗3号系统(BDS-3)的快速推进,结合GPS与BDS的组合定位系统的优势更加明显[9-11].鉴于BDS与GPS系统具有良好的兼容性,本文将采用GPS/BDS组合系统实现航测无人机事后动态定位,并结合平滑伪距(DSC)与相位观测量加快模糊度收敛速度,保证动态定位的精度与可靠性.
1 动态定位参数估计
GNSS动态定位方程中,未知参数包括时变参数(如位置参数)和时不变参数(如整周模糊度参数)两类,其载波相位双差观测量误差方程可表示为:
(1)
式中:X1为时变参数向量;X2为时不变参数向量;H1与H2分别为对应的系数矩阵;L为观测值与计算值的差值向量;P为载波观测值权阵.m为观测值数量,u与t分别为时变参数与时不变参数个数.采用分块最小二乘平差[12],则有

(2)
求解得

(3)
由于单一历元观测数据的法方程秩亏,需要多个历元观测数据联合求解[13],则有

(4)
式中,i表示历元.当时不变参数X2确定之后,即可根据式(3)求解时变参数X1.
2 联合载波与伪距观测量求解模糊度
伪距与载波为非等精度观测量,但通过合理确定两类观测量的权值,联合伪距与载波观测量可有效改善法方程的病态性,提高模糊度的收敛速度.
为便于编程实现,仅采用具有伪距与相位两类观测值的卫星观测数据.参照式(1),伪距双差误差方差可表示为[14]:

(5)
式中,下标p表示伪距观测量,其他符号含义同式(1).
采用伪距与相位观测量联合解算,实质就是在原相位观测量法方程两端对应位置上添加伪距分量:

(6)


(7)
(8)
参照式(4),n个历元伪距与相位观测量联合求解模糊度的法方程可表示为

(9)
3 基于Doppler DSC观测量
采用测距码进行伪距测量时,并非根据某一个码来测定距离,而是按照积分间隔中所有的码进行测距.通过测距码推算伪距的精度通常为码元宽度的1%.因此,码元宽度为300 m的粗码,其伪距精度约为3 m;码元宽度为30 m的精码,其伪距精度约为0.3 m[15].由于伪距精度较低,尽管联合伪距与相位观测量可加快模糊度收敛速度,但加速效率有限.同时,若伪距存在明显偏差,将导致法方程存在病态性.
为提高伪距观测量的精度,本文基于Doppler DSC观测值,其公式如下[16-17]:

(10)


(11)
由于Doppler观测量是一种独立观测量,依据误差传播率,DSC的方差为
(12)
由式(12)可知,DSC的方差并非随着平滑历元数的增加而单调递增,因此,应设置合理的平滑窗口保证DSC的精度.为保证该方法在PPK领域的应用,本文设定平滑窗口宽度为2.由于Doppler观测值精度优于原始伪距,DSC观测量精度理论上优于原始伪距观测量,因此,联合DSC与相位观测量更有利于模糊度的快速收敛.
4 实验数据与结果分析
实验采用飞马F200智能航测无人机,测控半径10 km,巡航速度60 km/h,支持GPS/BDS/GLONASS信号跟踪(由于GLONASS采用FDMA通讯模式,本文仅采用GPS/BDS组合进行定位解算).实验时间为2018年9月6日(GPST:04:40-05:37,年积日:249),采样频率20 Hz.实验测区航向长度约4.2 km,旁向宽度约2.0 km,地形起伏较小,测区范围如图1所示,图中省略了无人机起降阶段.图1(a)为航线平面图,航测方案按直角折线开展.图1(b)为高程方向变化图,由于实验阶段空中平均风速5.5 m/s,一定程度上影响无人机的稳定性,航线高程方向发生了较为明显的波动.
图2为航飞时段空间可见卫星轨迹图,由图可知,测段内GPS与BDS卫星数量充裕(平均可用卫星25.6颗),可保证实时定位的可靠性.测段卫星PDOP均值为1.1,其中HDOP均值为0.5,VDOP均值为0.9,由此可知,测段可用卫星空间几何分布良好,可保证实时定位的精度.

图1 无人机实验航线图

图2 航飞时段空中可见卫星轨迹图(G:GPS;C:BDS)
分别采用GPS、BDS与GPS/BDS组合系统观测数据进行PPK解算,以TBC(Trimble Business Center 3.90)基线解算结果为真值,逐历元计算差值,结果如图3与图4所示.由图3可知,GPS与BDS单频动态解均有明显的波动,高程方向波动更加明显,统计高程方向RMS值,GPS与BDS高程方向RMS值分别为1.56 cm与2.01 cm.组合系统在平面与高程方向的波动明显小于单系统,其高程方向RMS值仅为0.74 cm.图4示出了双频动态解算结果差值序列,较之单频解算结果,双频解算结果波动有所降低,有助于改善定位可靠性.由于少数历元(共计68个)BDS部分卫星无双频数据,该部分历元解算结果存在明显偏差.综合图3与图4可知,GPS单系统动态定位结果略优于BDS,GPS/BDS组合系统优势明显,在水平方向与高程方向的定位精度与可靠性均优于单系统.
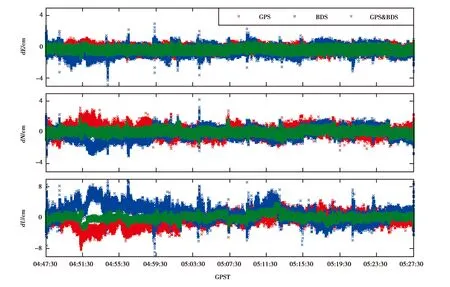
图3 不同GNSS单频数据动态定位结果对比图
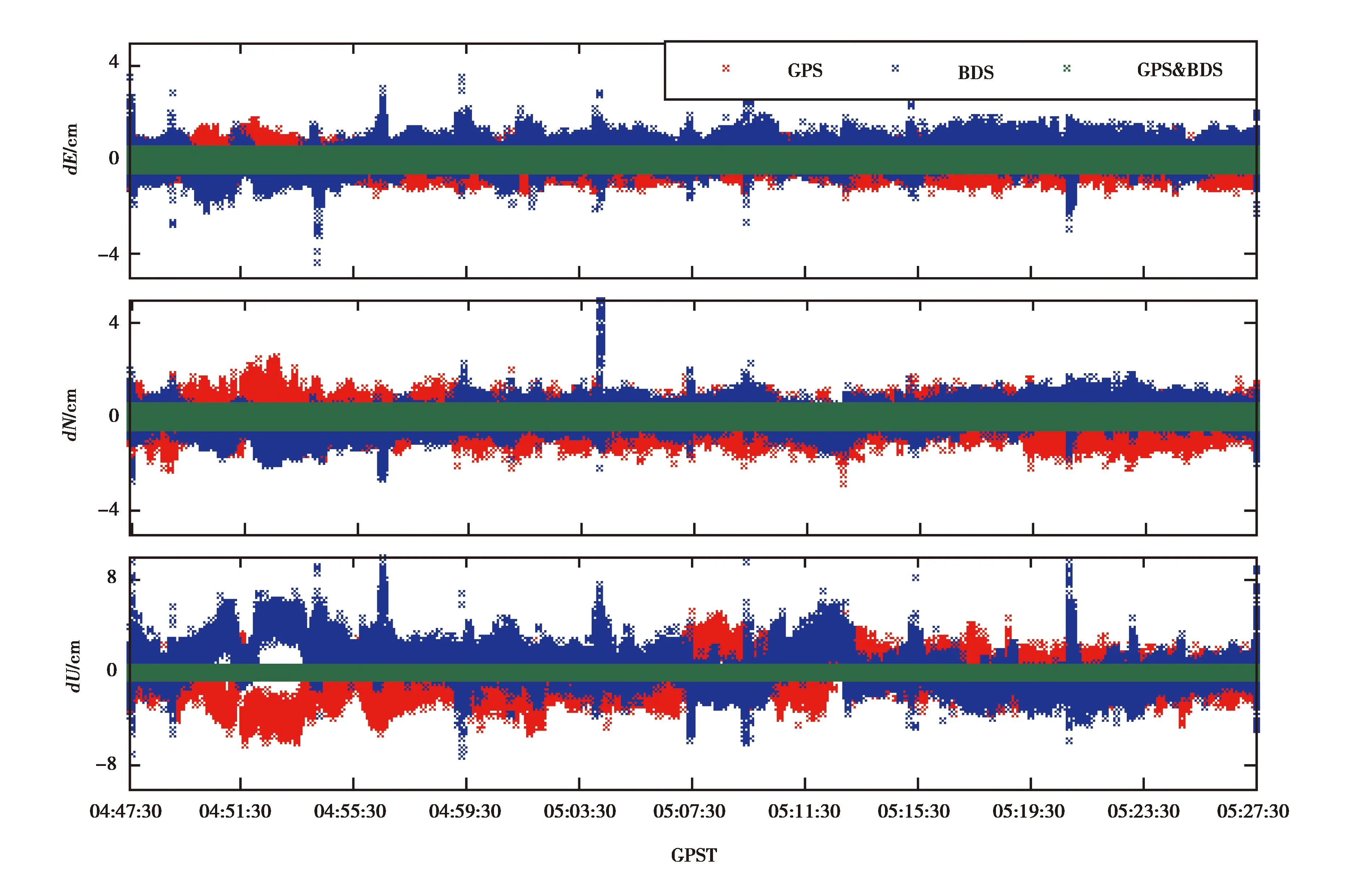
图4 不同GNSS双频数据动态定位结果对比图
5 结束语
本文基于航测无人机的动态观测数据,利用动态后处理方法获取无人机航测作业时的空间三维坐标.实验结果表明,较之常规RTK,PPK模式在保证动态定位精度的同时,可有效减少无人机POS系统质量,降低无人机的载荷负担.GPS与BDS单系统PPK定位结果均满足RTK常规定位的要求,组合系统的定位精度(水平RMS优于0.8 cm,高程RMS优于1.2 cm)明显优于单系统,更加适用于无人机动态定位领域.