基于雷达与光学传感器的协同定轨技术
2019-06-25王金伟
王金伟,郝 欣
(南京电子技术研究所,南京 210039)
0 引 言

本文提出的EKF方法采取带J2摄动项的扩展卡尔曼滤波避免了求使用非线性方程解轨道根数的环节,大大降低了问题的计算量与复杂性。
随着镜头技术、成像技术、信号处理技术的发展,使得光学传感器的性能得到了极大提高,其分辨率增强,搜索跟踪的距离大大增加。另外,光学传感器其测角精度远高于雷达[2]。常规的多光学传感器协同定位,需要采用多部光学传感器来进行空间的交叉,来对目标运动状态进行确定[3-4]。针对轨道目标运动的特殊性,本文提出了协同定轨技术,可使用序贯处理的方式兼容多部光学传感器的定位,仅修改其量测方程,且最少一部传感器亦可对弹道目标进行精确定位。
1 状态方程
其中Δt=tn-tn-1,
对状态向量求微分,可表示为:
状态转移矩阵如下式:


其中: ω=地球旋转速度;G=地球引力常数;M=地球质量,
[long,lat]表示为测站雷达所在的经纬度。
2 量测方程
常规多光学传感器定位,使用的站址需要有较长的基线才能取得较好的定位效果[5]。本文假定一个量测矩阵接近奇异的布站条件,设定雷达与光学传感器的处于同一站址。不失一般性,若雷达与光学传感器部站于异地,则需要将雷达传感器的量测转换至光学传感器的站址下,测量误差协方差同样需要进行转换。

图1 坐标系示意图
定义ECR为历元地心惯性系,RRC为本地直角坐标系,如图1所示。
ECR的X轴指向历元时刻赤道上的某一经度[6],由于导弹目标的定位精度需求、运行时长的特殊性、非合作特性以及传感器目标量测精度,此处无需进行精确的J.2000坐标系转换,仅需进行相对地心惯性系转换。Z轴指向北极,Y轴为该坐标系右手系表示。
则有传感器测站位置在ECR坐标系中的定义为:

其中Rpo,Req为WGS-84坐标系中的地球参数,


定义雷达传感器的测量坐标系为R,A,E,则有
R(t)=sqrt(ρ1(t)2+ρ2(t)2+ρ3(t)2),
A(t)=atan(ρ1(t)/ρ2(t)),
E(t)=atan(ρ3(t)/sqrt((ρ1(t)2+ρ2(t)2))),
在处理过程中需注意不同象限的情况,此处不再赘述。
3 定轨算法
在基于雷达与光学量测的协同定轨技术中,最优无偏估计[7]需满足如下最小均方根误差的表达式:

在光学量测产生的条件下,w取上式的右下角方位、仰角两个元素。
解决如上式所示的最优无偏估计问题,常规有两种方式,一种是批处理最小二乘方式,一种是序贯扩展卡尔曼滤波[8]方式。在本文中采取的是序贯扩展卡尔曼滤波的方式。
对当前量测值进行外推:
协方差的外推形式为:
其中 COV+是估计误差协方差,Q为过程噪声,φn,n-1是第二节中提到的状态转移矩阵,测量矩阵“H”定义为:
滤波增益矩阵由下式得出:

当前估计误差协方差更新为:COV+|n=COV+|n-K A COV+|n,
其中过程噪声Q表示为:
状态改进向量表示了测量值与预测值之间的残差,也叫做新息。新息突然变大表示运动状态的突然变换或滤波模型的失配。滤波系数k在导弹处于被动段稳定运动状态时,应该是一个比较小的值。过程噪声模型是用于度量假定模型与实际模型之间的吻合程度。在被动段,过程噪声模型应该取比较小的值。
4 仿真及结果分析
采用P波段雷达配套光学传感器及X波段雷达配套光学传感器两种场景,使用100次蒙特卡洛仿真进行其协同定轨精度的评估。
场景一:P波段三坐标雷达及一部光学传感器,其配置及其基本参数如表1所示。

表1 场景一传感器配置
场景二:X波段三坐标雷达及一部光学传感器,其配置及其基本参数如表2所示。

表2 场景二传感器配置
仿真弹道采用发落点经纬度参数及弹道最高点、导弹在空中飞行时间等参数,使用Gibbs方法计算出粗轨,再经过数值调整,使得其满足精确的发落点。此处计算出关机点的六维状态向量,再使用matlab中的ode5积分出惯性系下的弹道[9],在将其转换至量测坐标系下,简单起见此处仿真弹道仅考虑了地球自转及J2摄动,仿真弹道参数如表3所示。

表3 仿真弹道参数
不失一般性,使用其1 Hz数据据率雷达数据,使用20 Hz产生光学探测数据真值,在真值基础上叠加白噪声随机误差,仿真弹道如图2所示。
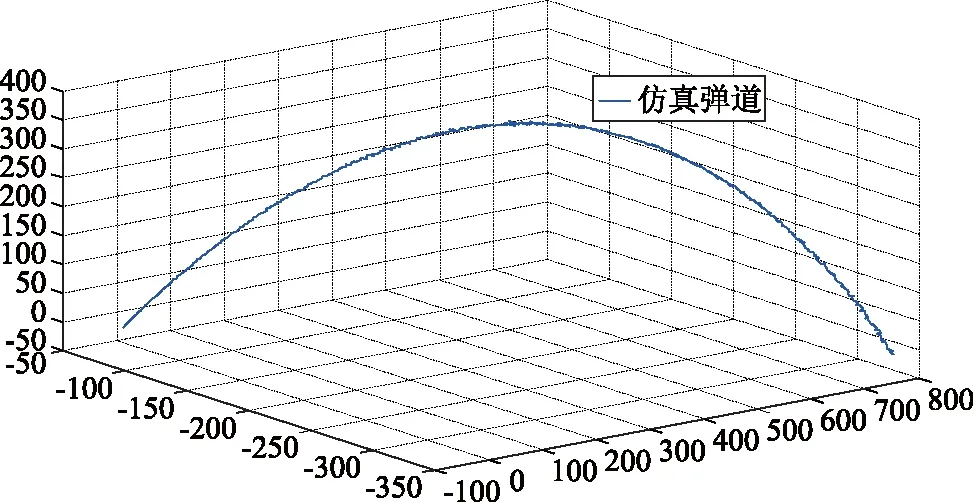
图2 目标仿真示意图
弹道导弹在达到最高点前10 s,模拟释放干扰机,此时目标指示雷达丢失目标,光学传感器在雷达传感器目标指示下接续观测到目标,最终跟踪效果如图3所示。

图3 跟踪结果示意图
其地心地固坐标系下三维的跟踪精度及合成跟踪精度如图4、图5所示。

图4 P波段雷达及光学跟踪精度图

图5 X波段雷达及光学跟踪精度图
由图示可得出在单一光学传感器接续跟踪导弹后,系统跟踪精度并未发生较大变化,成功运用光学传感器其测角精度远高于雷达的特性,使用一部光学传感器亦可弹道目标进行精确定位。
5 结 语
针对导弹突防条件下弹载干扰机施放的主瓣干扰的场景,雷达难以跟踪目标,本文提出的协同定轨技术,利用多部(最少一部)光电、光学传感器对目标的角度测量信息,可对弹道目标进行精确定位,实现连续稳定地跟踪目标。
