谈核电机组负荷跟踪控制
2019-06-24于盛展
于盛展

【摘 要】论文主要对多种核电机组负荷跟踪控制原理以及运行模式进行了研究,并对堆型的负荷跟踪运行控制特点进行了分析,了解了机组参与调峰、调频的可行性及其中存在的一些问题,为我国核电机组负荷跟踪控制技术的发展提供了参考依据。
【Abstract】 In this paper, the load tracking control principle and operation mode of various nuclear power units are studied, and the characteristics of load tracking operation control of reactor type are analyzed, and the feasibility of unit participating in peak and frequency regulation and some existing problems are understood, so as to provide some reference for the development of load tracking control technology of nuclear power units in China.
【关键词】核电机组;负荷;跟踪控制
【Keywords】 nuclear power unit; load; tracking control
【中图分类号】TM623 【文献标志码】A 【文章編号】1673-1069(2019)04-0144-02
1 引言
近年来,随着装机比例的增高,核电机组负荷跟踪能力逐渐成为影响整个电力系统安全运行的重要因素,对于电网与电源结构的发展以及核电企业自身的发展等都有着较大的影响,为了促进我国核电企业的进步与发展,我们需要对核电机组的负荷跟踪控制能力进行综合探讨,了解不同跟踪控制系统的优缺点,从中吸取经验,促进本企业的核电机组负荷跟踪控制系统的开展。
2 常轴向偏差控制技术
负荷运行的控制计划是在20世纪80年代由美国一家公司提出的,该公司名为西屋公司,这个方案的提出对于核电企业的发展起到了很大的促进作用。之后在1974年发表的WCAP-8403报告中,不仅具体讲述了核电机组的堆芯公路分部控制,还对负荷的跟踪过程以及控制棒组的运行程序等进行了详细介绍,这一报告的发表也推进了核电机组控制的发展。两年后,该公司在Indiana point unit2上正式应用了该控制方案,然后又针对负荷跟踪进行了进一步实验研究,随后又发明了两种负荷跟踪运行模式,一种是MODE A,另一种是MODE B。
2.1 MODE A运行模式
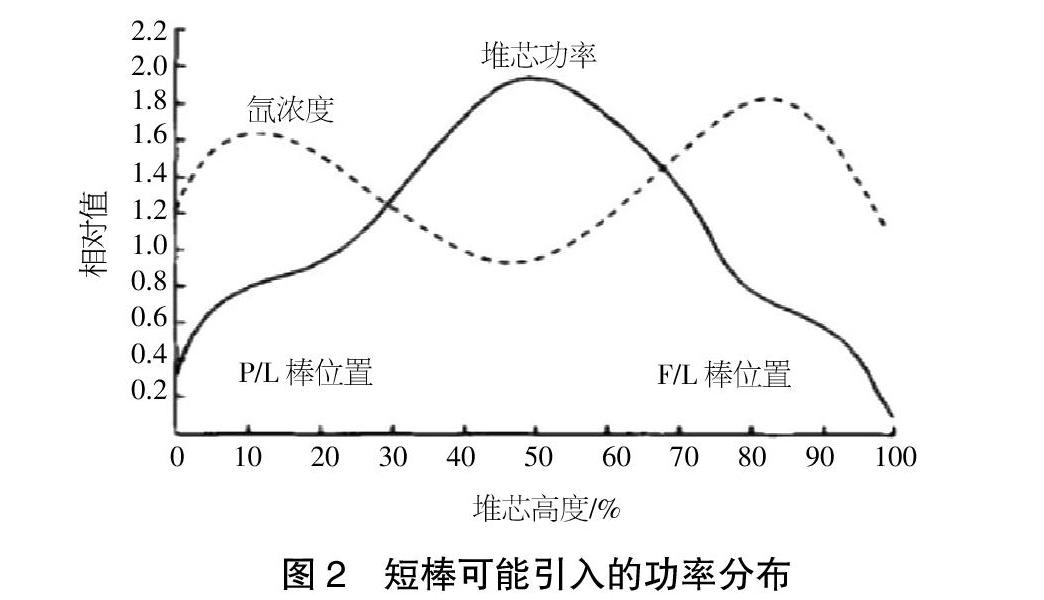
MODE A的运行模式功率控制系统原理如图1所示。通过观察此图可以发现,为了使控制堆芯的温度可以保持在平均温度,使用了四个重叠的控制棒组,同时还可以达到反应堆功率自动控制的目的;想要满足所需的功率分布状况,则需要进行手动调节硼浓度;硼有一个特点,在跟踪控制系统运行的过程中硼的浓度变化反应较慢,化容系统中反应堆冷却剂很大程度上限制了硼稀释的速度。在遇到高燃耗状态时,硼浓度过低会影响整个系统功率的提升;控制棒组件的插入深度也是有规定限制的,所以这对于功率提升的速度产生了很大的限制作用,特别是在低功率运行的状况下,要想在短时间内将功率提升上去,就需要在硼浓度稀释前使控制棒抽出较多的堆芯,由此一来又会使功率升高的速度明显下降。因此我们能够得出结论:要想保证MODE A负荷跟踪模式高效运行,应当将其应用于自身带有基本负荷的压水反应堆核电机组,因为它不仅具有负荷跟踪能力,还有相应的调频能力[1]。
2.2 MODE B运行模式
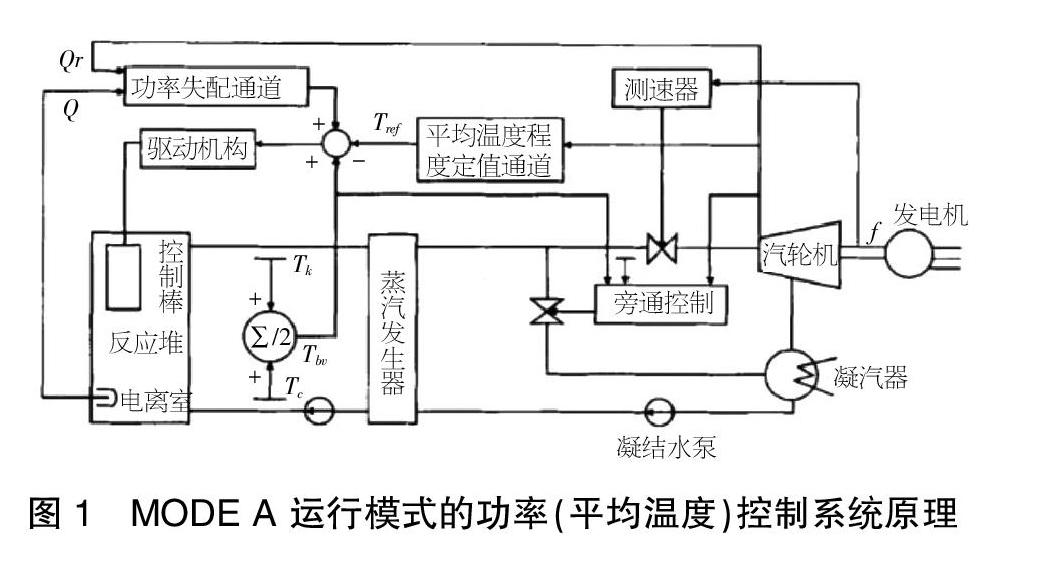
MODE B的运行原理是与MODE A的基本原理相同,只是MODE B在运行过程中引入了短棒,这就使得整个模式的运行灵活性得到了提高,并且使得功率的上升速度得到了很大提高。即使如此,由于堆芯内部换成了短棒,使得堆芯中间的功率浮动性变强,但是反映轴向偏差的模拟量值却不会发生变化(图2),所以这也导致MODE B运行模式并没有真正地投入到核电机组的跟跟踪控制系统中。
MODE G运行模式是法国法马通公司提出的,这个运行模式被应用到了第二代的核电机组中。MODE G运行模式引入了灰棒组G1、G2、N1、N2,灰棒组的引入很大程度上降低了功率分布带来的不良影响,在该模式中,N1与N2是黑棒。为了尽可能减轻轴向功率分布给机组带来的影响,同时便于控制系统对轴向功率的偏移,灰棒组主要采用了重叠的方法进行插入。控制机组温度的主要是控制棒R,它具有独立性,可以进一步对堆芯的反应性产生作用。通常情况下,R棒组的反应性非常强,所以在操作中会受到一定的限制,以免造成不良影响。
MODE G运行模式在进行控制的过程中主要是利用G棒组以及R棒组,通过对两者的控制达到调节堆芯温度的作用。1981年,特利卡斯坦电站3号核电机组安装了一个双模式控制装备,该装备能够同时利用MODE A和MODE G对反应堆进行控制。这使得两个运行控制模式的优点得到了有效发挥,很大程度上提高了核电机组的跟踪控制系统运行效率。不论功率大小,MODE G都可以完成负荷跟踪,同时可以在短时间内完成对功率的改变。但是其中也存在着一定的缺点,当在慢负荷情况下进行跟踪时,MODE G就会产生较多的废液,从而对该核电机组造成影响。MODE A与MODE G的性能对比见表1。
[ 电网需求 MODE G MODE A 负荷跟踪运行 功率变化范围(额定功率)/% 30~100 30~100 变化速率(额定功率)·min-1 0.3 2 旋转备用能力 功率水平和功率升高速率 15%~22%时5%/min,更高的速率受到硼稀释的限制 以5%/min返回到满功率 频率控制 自动频率控制(功率变化范围)/% ±3 ±5 变化速率/%·min-1 ±3 1 ]
2.4 美国AP1000的MSHIM运行模式
MSHIM运行模式简化了对于硼浓度的控制,在这种运行模式下硼浓度的变化只应用到起动、关闭和燃耗中,在这种模式的运行中所使用的也是灰棒组,其功率在大于15%时会进行自动控制。
为了实现反应堆功率控制以及轴向功率的分布控制,需要控制棒控制系统对堆芯的位置进行调节,从而提高该运行模式的跟踪控制效率。核电机组出现高负荷状况时会出现甩负荷状况,这种状况下功率控制系统会向控制棒系统发送信号,系统会提前释放控制棒,从而达到快速减小反应堆功率的效果。
3 核电机组负荷跟踪控制系统
由以上几组针对核电机组负荷跟踪控制技术的分析可以发现,核电机组负荷技术完成对反应堆功率的调节依据的电网的具体需求,并由此达到控制放射性废水过度排放的目的。核电机组负荷跟踪控制技术的实施中会遇到很多的问题与困难,比如,想要实现功率水平和功率分布的解耦控制是较难的,对于硼浓度的控制也是一大难点。在研究与设计的过程中,相关工作人员需要从多方面进行考虑,想要实现核电机组负荷跟踪控制系统的高效运行,还需要不断探索。
4 结语
总而言之,在核电企业不断发展的过程中我们要不断地对核电机组负荷跟踪控制系统进行研究与创新,从已有的系统试验中总结经验,研发出更加高效、实用的跟踪控制系统。
【参考文献】
【1】钱耀,吕迪.大型核电压水堆的负荷跟踪控制模式分析[J].工业设计,2015(08):23-25.
