轮速传感器的研究及应用
2019-06-22杨英杰
杨英杰

摘 要:主要论述一种轮速传感器,它分为无源磁电被动式传感器和有源霍尔主动式传感器,是以导体和磁场发生相对运动而产生电动势为基础的。它安装于车轮上,主要为ABS(防抱死制动系统)开发的。为了防止车轮抱死,控制程序必须知道单个车轮的速度,足以可见,轮速传感器在汽车上的重要性。
关键词:轮速;传感器;ABS;磁电
中图分类号:U463.34 文献标识码:A 文章编号:1005-2550(2019)03-0028-05
Abstract: This paper mainly discusses a kind of wheel speed sensor, which is divided into passive magnetoelectronic passive sensor and active Hall sensor. It is based on the electromotive force generated by the relative motion of conductor and magnetic field. It is installed on wheels, mainly developed for ABS (Anti-lock Braking System). In order to prevent the wheel from locking, the control program must know the speed of a single wheel, enough to see the importance of the wheel speed sensor in the car.
Key Words: wheel speed; sensor; ABS; magnetoelectric
1 项目背景
随着国家对汽车交通安全的重视程度,已陆续出台了很多强制法规和措施,要求商用车和乘用车必须具有防抱死制动系统ABS(Antilock Braking System),用于辅助驾驶。它是在制动过程中防止车轮被制动抱死,提高汽车的方向稳定性和转向操纵能力,缩短制动距离的安全装置[1]。其基本的原理是ABS控制单元ECU根据相关轮速传感器的信号,对制动车轮的滑移情况进行计算和判断,然后输出控制信号,通过控制制动力,以使车轮不被抱死。其中,轮速传感器的输出信号是ABS控制器进行控制的主要依据,为此需重新开发一种轮速传感器用以适应汽车需求。
2 轮速传感器的种类
防抱死系统ABS一般由轮速传感器(WSS)、电子控制单元(ECU)和液压执行机构(HU)三部分组成。轮速传感器分为无源磁电被动式传感器和有源霍尔主动式传感器。
因该篇论文主要是基于中重卡的工况而开发的轮速传感器,根据其工作特点,本文重点讲述适应该环境下的磁电式轮速传感器的开发过程。
3 磁电式轮速传感器
磁电式轮速传感器,一般称为无源被动式轮速传感器,是因为它不需要电力供应。
3.1 基本原理
磁电传感器是以导体和磁场发生相对运动而产生电动势为基础的。根据磁电感应定律,具有N匝的线圈内的感应电动势e的大小取决于贯穿该线圈的磁通Φ的变化速率[2],即:e=-N×dΦ/dt
如果以运动的速度来表示,感应电动势e的大小也可写成:
式中,B为气隙磁感应强度,单位为T(Wb/m2);l为线圈导线的总长度,单位为m; dx/dt为线圈和磁铁间相对直线运动的线速度,单位为m/s。
3.2 技术要求
根据整车使用环境,为保证传感器的性能可靠性和穩定性,轮速传感器需满足如下技术条件:
1、ABS传感器与弹簧衬套配套使用,整车安装后拉拔力120+80-20N;
2、传感器工作温度范围:-40℃~200℃;
线缆的温度范围:-40℃~180℃;
插接件的温度范围:-40℃~80℃;
3、传感器的输出:阻值为( 1550±150 )Ω(25℃);
电感为(0.8 ~ 1.2)H(f=1000Hz);
4、在齿数Z=100,直径D=138mm的齿轮配套测试:
传感器与齿圈的间隙为(1±0.05)mm ,信号频率为f=22Hz时,感应电压峰-峰值不小于0.2V。
3.3 传感器结构及介绍
3.3.1 产品结构
磁电式轮速传感器由传感器头和齿圈两部分组成,传感器头由永磁铁、极轴、感应线圈等组成。图1为磁电式轮速传感器的结构示意图。
传感器头被线圈包围直接安装于齿圈上方。传感器感应端正对齿圈齿顶,并保持径向间隙δ。传感器内装有电感线圈,极轴的圆柱部分贯穿线圈中心,磁钢(永磁铁)的磁力线通过线圈中心及极轴、传感器壳体、飞轮等形成闭合回路。当齿轮转动时齿根和齿顶部分周期性地接近传感器的感应端,使磁路的气隙长度、磁阻随之变化,从而引起线圈电感和电流的改变,对于Z齿的齿轮就产生Z次周期变化。在传感器的输出端形成周期性正弦波,通过仪表的整形、滤波以及数据处理,在仪表指示器上指示出相应的发动机转速。
传感器的信号随转速变化,信号幅值在1~15V的范围内变化。当车速很低时,传感器输出的信号小,信号无法传到电脑。图2为传感器的输出信号。
3.3.2 工作原理
磁电感应式轮速传感器就是利用电磁感应原理做成的,其结构原理如图3所示。
当齿圈的齿隙与传感器的磁极端部相对时,磁极端部与齿圈间的空气间隙最大,传感器永磁性磁极产生的磁力线不容易通过齿圈,感应线圈周围的磁场最弱;当齿圈的齿顶与传感器的磁极端部相对时,磁极端部与齿顶间的空气间隙最小,传感器永磁性磁极产生的磁力线容易通过齿圈,感应线圈周围的磁场较强。汽车在行驶过程中,齿圈上的齿顶和齿隙交替通过永久磁铁的磁场,整个回路中的磁通量随之发生变化,在线圈中产生感应电动势。通过检测感应电动势的波形信号可以计算出感应电动势。
3.3.3 安装位置和线路设计
图4为传感器的安装位置示意图。传感器布置在每个车轮处。转子与轮毂一体化或布置在一起,定子在制动底板上,并保持较小的间隙。其信号可以反映车轮的转角、转速、角加速度,以及产生抱死信号、转动信号。
传感器的安装必须保证能产生可靠正确的信号,传感器底部与齿顶的间隙一般控制在1-2mm范围以内。
传感器的轴向应垂直于齿圈的径向,最大偏差角度为2.5。
齿轮材料采用导磁率大的金属材料,如45钢。齿形为渐开线齿形,齿与齿间的间距及齿的宽度对测速影响较大,当齿与齿的间距过小时,可能导致传感器无输出,严重影响测量,因此齿形要按要求加工。
在整车的线路设计中,通常采用二芯电缆线将传感器与ECU连接起来,但要求连接线路部分具有低接触电阻、在动态冲击影响下通过连接的接插件和端子具有抗腐蚀能力。
3.3.4 应用电路
磁电式轮速传感器工作时如同传导ac电流的发电机一样工作。因此简单的解决方案就是使用微分放大器。然而在汽车应用上,没有可用的负供应源,即需要一个特殊的电路。
3.3.5 磁钢的选型
目前,常用的永磁材料有铝镍钴(Alnico)、钡铁氧体(Ba—Ferrite)和锶铁氧体(Sr-Ferrite)、钐钴(SmCo 2:17型和SmCo 1:5型)和钕铁硼(NdFeB),这是按发明的先后顺序排列的;若按年产吨位排列则为:铁氧体、钕铁硼、铝镍钴、钐钴;若按销售额排列则为:铁氧体和钕铁硼并列第一,然后是钐钴、铝镍钴。
在选择使用磁钢类型时,需从磁通量、磁通密度、剩磁、磁场强度、矫顽力特性参数及使用温度范围来选择磁钢。所以,选择钐钴磁钢用于轮速传感器为较优方案。
钐钴磁钢是由钐、钴和其它金属稀土材料经配比,溶炼成合金,经粉碎、压型、烧结后制成的一种磁性材料,具有高磁能积、极低的温度系数,最高工作温度可达350℃,负温不限,在工作温度180℃以上时,其及温度稳定性和化学稳定性均超过钕铁硼永磁材料。具有很强的抗腐蚀和抗氧化性;所以被广泛应用在航空航天、国防军工、微波器件、通讯、医疗设备、仪器、仪表,各种磁性传动装置,传感器,磁处理器,电机,磁力起重机等。它具有如下特点:
1、非常好的矫顽性。
2、良好的温度稳定性。
3、价格昂贵,易受价格波动(钴市场价格敏感)。
3.3.6 线圈的选型
用于产生电动势的线圈采用可焊性漆包线。由于轮速传感器在特定条件下,极高的温度要求,在漆包线的选型中最好使用聚酰亚胺漆包线。聚酰亚胺是目前有机类漆包线中耐热等级最高的漆包线漆,其长期使用温度可达220以上。
聚酰亚胺是综合性能最佳的有机高分子材料之一,耐高温达 400℃以上 ,长期使用温度范围-200~300℃,无明显熔点,高绝缘性能,103赫下介电常数4.0,介电损耗仅0.004~0.007。
3.3.7 温度影响
在磁电式传感器中温度影响是一个重要的问题,必须加以计算。
永久磁钢的磁感应强度随温度的增加而减小,所以感应电动势e也随温度的增加而减小。传感器的线圈是用铜线绕制而成的,所以线圈电阻R的温度系数是正的,温度每增加10℃,电阻大约增加4%。
3.3.8 磁电式轮速传感器的缺陷
磁电式轮速传感器的输出电动势取决于线圈中磁场变化的速度,因而它是与被测速度成一定比例关系。当车轮转速越高时,其电动势越大,反之,当车轮转速越低时,其电动势越小。如果转速太低时,输出电动势很小,以致无法测量。所以,磁电式轮速传感器一般有一个下限工作频率,一般为50Hz。对于汽车来说,当汽车车速太低时,因磁电式轮速传感器无法输出有效信号,电子控制单元ECU无法采集到具体电压,则防抱死系统ABS不会正常工作,对汽车的安全辅助驾驶带来影响。如上所述,它具有如下缺陷:
1、频率响应不高。当车速过高时,传感器的频率响应跟不上,容易产生误信号。
2、抗电磁波干扰能力差,尤其是输出信号振幅值较小时。
目前,国内外测速范围一般为15-160km/h,今后要求控制速度范围扩大到8-260km/h以至更大,显然磁电式轮速传感器很难适应。
4 霍爾式轮速传感器
基于磁电式轮速传感器的缺陷,在此简要对霍尔式轮速传感器介绍。霍尔传感器是利用霍尔效应原理将被测物理量转换为电动势的传感器。因其需提供外部电能,因此将其称为主动式轮速传感器[3]。
4.1 霍尔效应
图5所示的金属或半导体薄片,若在它的两端通过控制电流I,并在薄片的垂直方向上施加磁感应强度为B的磁场,那么,在垂直于电流和磁场方向上(即霍尔输出端之间)将产生电动势UH(霍尔电动势或霍尔电压)。这种现象称为霍尔效应。
4.2 霍尔器件
霍尔器件分为:霍尔元件和霍尔集成电路两大类,前者是一个简单的霍尔片,使用时常常需要将获得的霍尔电压进行放大。后者将霍尔片和它的信号处理电路集成在同一个芯片上。
4.3 霍尔开关电路
霍尔开关电路又称霍尔数字电路,由稳压器、霍尔片、差分放大器,斯密特触发器和输出级组成。在外磁场的作用下,当磁感应强度超过导通阈值BOP时,霍尔电路输出管导通,输出低电平。之后,B再增加,仍保持导通态。若外加磁场的B值降低到BRP时,输出管截止,输出高电平。我们称BOP为工作点,BRP为释放点,BOP-BRP=BH称为回差。回差的存在使开关电路的抗干扰能力增强。霍尔开关电路的功能框见图6:
4.4 产品结构及工作原理
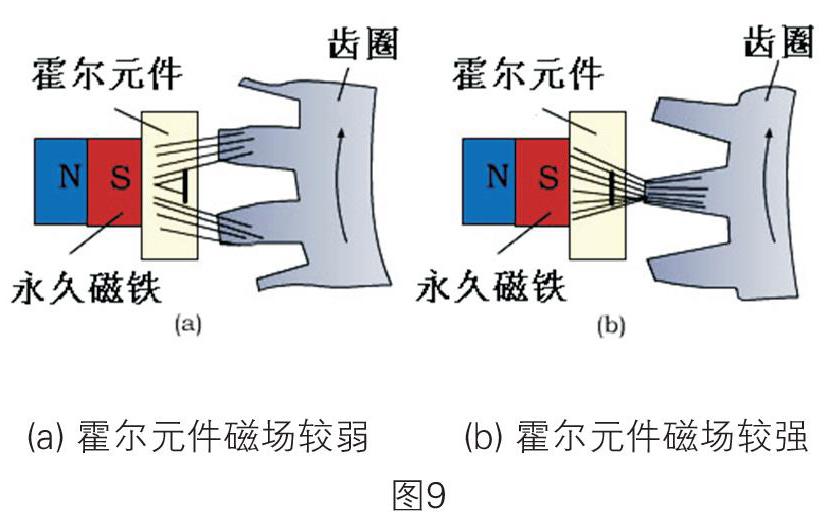
霍尔轮速传感器由传感头和齿圈组成,传感头由永磁体、霍尔元件、电子电路等组成。图8为其产品结构示意图。
永磁体磁力线通过霍尔元件通向齿圈,当齿隙正对霍尔元件中心时,穿过霍尔元件的磁力线分散,磁场较弱;当齿顶正对霍尔元件中心时,磁力线集中,磁场较强。齿圈转动时,磁场强弱发生交替变化,从而引起霍尔电压的变化。图9为霍尔轮速传感器的工作原理。
4.5 工作电路
如下图10所示,霍尔传感器产生的霍尔信号很小,必须要经过放大。霍尔元件输出的毫伏级的准正弦波电压信号,送往ECU进行处理,得到需要的电信号[4]。
4.6 优点
霍尔式车轮传感器上布置有芯片,需要提供电源,但具有一些优点:
1、输出的电压信号强弱不随转速的变化而变化。在汽车电源电压为12V的条件下,信号的幅值保持在11.5V到12V间。
2、传感器频率响应高达20kHz,用于ABS中,相当于车速为1000km/h时所检测的信号频率,因此不会出现高速时频率响应跟不上的问题。
3、霍尔式车轮传感器输出的电压信号强弱不随转速变化,且幅值较高。霍尔式车轮传感器的抗电磁波干扰能力较强。
同时,霍尔轮速传感器的稳定性好,抗外界干扰能力强,如抗错误的干扰信号等,因此不易因环境的因素而产生误差。
5 总结
综上所述,主要介绍了被动式磁电式轮速传感器和主动式霍尔式轮速传感器,是汽车防抱死系统ABS主要的传感单元,在汽车安全方面起着举足轻重的作用。两种传感器各有优缺点,在实际应用中仍需根据整车环境和工况进行综合对比,选择利好的产品。但随着技术的发展和进步,将会更多技术类型用于轮速传感器,如光电效应。如今智能传感器、执行器以及电控单元等得到了大力开发,并且在汽车上也开始广泛应用雷达技术、计算机网络技术等,可以有效集成汽车安全装置,促使汽车安全性能得到提升。汽车的电动化、智能化、信息化和自动化程度不断提升,那么汽车安全也需要朝着智能化方向发展[5]。
参考文献:
[1]付百学.汽车试验技术[M].3版.北京:北京理工大學出版社,2011.
[2]沈长生.常用电子元器件使用一读通[M].3版. 北京:人民邮电出版社,2003.
[3]沙占友,等.智能传感器系统设计与应用[M]. 北京:电子工业出版社,2004.
[4]冯崇毅.汽车电子控制技术[M].1版.北京:机械工业出版社,2003.
[5]扬欣荣.智能仪器原理、设计与发展[M].长沙:中南大学出版社,2003.
