煤矿井下钻锚机器人布网单元设计与仿真
2019-06-22马宏伟王成龙尚东森薛旭升薛力猛
马宏伟,王成龙,尚东森,薛旭升,薛力猛
(西安科技大学 机械工程学院,陕西 西安 720000)
现阶段影响煤矿井下巷道快速成型的主要原因在于初成型巷道永久支护慢[1]。煤矿巷道成型包括掘进和永久支护两个作业,对煤矿井下巷道快速成型影响较大的是永久支护[2]。传统的支护方式有人工支护方式,人工支护的方式是通过人工持钻持网对巷道进行永久支护,由于人工支护方式的劳动强度大、支护效率低而且作业人员安全不能保障等问题,同时在进行人工支护时,巷道掘进作业需停止作业,严重影响了煤矿井下巷道成型的速度,不能满足煤矿企业发展需求而逐渐被淘汰[3]。近年来,随着科学技术的高速发展以及煤矿企业生产要求不断提高,国内外许多企业和科研人员开始研制应用于煤矿井下巷道成型的设备[4],如三一重工等企业研发的多种类型的掘锚一体机,是通过对掘进机进行改造,实现煤矿井下巷道掘进和支护的机械化,缩短支护时间从而提高煤矿巷道成型的速度[5]。陕西陕煤韩城矿业对煤矿移动式临时支护设备进行改造,在其上加装支护设备来实现煤矿井下巷道永久支护机械化,提高永久支护效率提高煤矿巷道成型速度[6]。以上两种支护方式都能缩短煤矿巷道成型的速度,但是都存在一定的问题,在巷道支护布网时,还需通过人工将支护片网搬运至顶网设备上同时工人是在空顶下进行作业,还存在工人的劳动强度大且人身安全不能有所保障等问题。
随着机器人技术的不断发展且为有效解决上述问题,提出了一种适用于煤矿井下巷道永久支护的钻锚机器人。该机器人身上集成了永久支护的布网单元和钻锚单元,通过单元间的相互配合完成巷道支护作业,钻锚机器人简易图如图1所示。与掘锚一体机、可移动式临时支护设备相比,该机器人的最大的优点在于实现了布网、钻锚的机器人化,减少支护时间从而提高煤矿巷道成型速度;同时降低工人劳动强度,保障了作业人员生命财产的安全。本文着重介绍了该机器人布网单元的结构设计,关键部件的承载受力分析,并对其进行运动学仿真分析,验证结构设计的合理性和可靠性。

图1 钻锚机器人示意图
1 钻锚机器人布网单元的设计要求
为满足煤矿井下巷道永久支护布网的需求,对钻锚机器人的布网单元提出以下设计要求:①环境特点,该机器人应用于煤矿井下中,环境较为复杂、空间有限且较为封闭,还存有易燃易爆的气体[7],则布网单元需防爆、结构紧凑;②抓取目标,将机器人前方网库中的支护片网实现单张抓取,且应根据煤矿巷道常规使用的支护片网材料属性要控制抓取力度防止破坏支护片网;③目标任务,在煤矿巷道有限的空间内,将抓取的支护片网稳定可靠的顶放到煤矿井下巷道煤壁上,完成布网单元作业。
2 钻锚机器人布网单元的结构设计
布网单元和网库都集成在钻锚机器人的主体结构上,网库位于机器人的最前方,布网单元则次之,这样既确立了布网单元工作平台也确定了抓取的位置,便于控制布网单元抓取以及完成作业。钻锚机器人布网单元采用模块化设计方法,主要是由机械手和机械手臂组成。机械手是对网库的支护片网进行单张抓取,机械手臂是将抓取的支护片网顶放到煤矿井下巷道煤壁上,驱动机构主要是由液压缸和防爆电机组成。工作原理是通过布网单元的机械手将网库中的支护片网抓取,应用布网单元的机械手臂将支护片网顶放到巷道需支护的煤壁上。
2.1 机械手结构设计
支护片网抓取的关键部件是机械手其结构设计与支护片网规格相关。煤矿井下巷道支护片网的规格:钢筋直径为5mm、10mm,长×宽1500mm×2900mm、1000mm×2000mm,网格大小为100mm×100mm,以此种类型的支护片网进行机械手设计。钻锚机器人布网单元的机械手由伸缩导轨、机械手指、机械指架、限位件、双杆液压缸组成。伸缩导轨作为机械手的主要承载工具,安装有机械指架,机械指架通过圆柱销将机械手指和机械手指上的限位件连接在一起,如图2所示,伸缩导轨的设计主要是针对两种不同规格的支护片网进行调节机械手抓取支护片网的位置,以达到抓取的稳定性;机械手指上的限位件的设计主要考虑每次只抓取单张支护片网,机械手指的运动轨迹如图3所示。
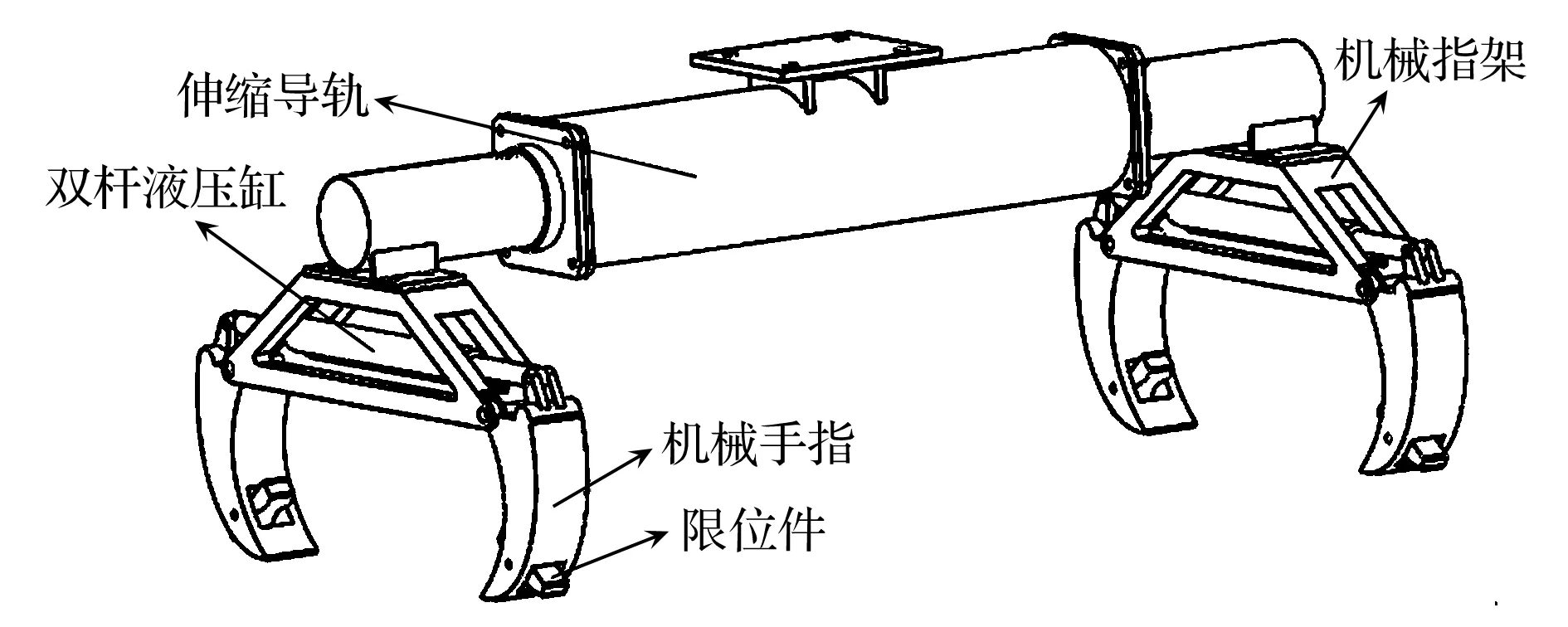
图2 机械手

图3 机械手指抓取轨迹
2.2 机械手臂选取
在煤矿巷道永久支护布网中,对于钻锚机器人上网库中的支护片网到达支护的位置,上顶需要3个自由度,侧顶需要4个自由度;在进行巷道顶部进行布网时,需要布网单元实现对支护片网的抓取、升降、俯仰、回转和移动5个动作,侧帮进行布网时,需要抓取、升降、俯仰、回转、回和移动6个动作,为了满足上述的要求,则机械手臂需要6个自由度去完成作业,为完成煤矿巷道永久支护布网,基于一般煤矿巷道的尺寸(宽×高:5000mm×3000mm)进行选择机械手臂的类型。
据现阶段机械手臂的发展状况,钻锚机器人布网单元机械手臂可以选择满足布网单元需求的现有机械手臂,机械手臂按坐标系可以分为:直角坐标系、圆柱坐标系、极坐标型和关节型[8]。连杆机构为面接触所受到的压强小、能承受较大的载荷、抗冲击能力强、适应能力强,也可以实现各种复杂的运动轨迹,且选用液压驱动关节型三连杆机构的机械手臂[9],如图4所示。
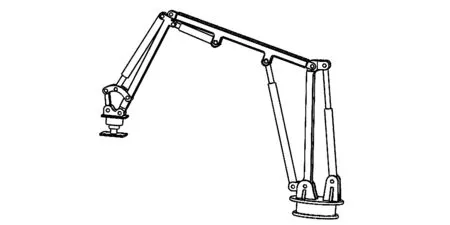
图4 机械手臂
2.3 布网单元实现的方法
布网单元的SolidWorks三维装配图如图5所示,首先确定煤矿井下巷道支护片网的规格,调整机械手的伸缩导轨使抓取能达到一定的稳定性,其次通过机器人行走机构到达煤矿井下巷道需永久支护的位置,调整布网单元机械手臂,使布网单元机械手到达钻锚机器人网库上方,再调整机械手臂的各个液压缸使机械手下降,当机械手指上的限位件与网格边界相接触,产生一定的挤压力后停止机械手下降,机械手指上的双杆液压缸伸长驱动机械手指进行抓取动作,当网格边界与限位件和机械手指产生一定挤压力时,停止液压缸的伸长;再通过调整机械手臂携带机械手和支护片网顶放到煤矿井下巷道煤壁上,完成布网作业。
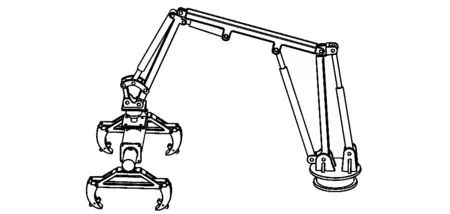
图5 布网单元
3 布网单元机械手关键部件受力分析并进行有限元分析
3.1 机械手指受力分析

F4y+F4y’=G
(3)

图6 机械手指的受力情况
设计机械手指的材料选用45钢,此材料有良好的刚度和韧性,能满足机械手指长时间工作的要求,取安全系数ns=3,机械手指的许用极限值:
3.2 导轨受力分析
机械手导轨是布网单元主要承载机构也是布网单元的关键部件,要对其强度以及受力变形进行分析,首先根据导轨的受力情况进行受力分析,如图7所示。导轨主要受两端机械手指、机械指架、支护片网的重力。为了满足机械手长时间稳定工作的需求,设计伸缩导轨的材料也选用45钢。
F=g1+g2+G
(5)

图7 导轨受力情况
3.3 支护片网的受力分析
永久支护是将支护片网无损坏的顶放在煤矿井下巷道煤壁上,为了满足煤矿井下支护的要求,要确定机械手抓取支护片网使的受力大小,如图8所示,根据查阅的相关资料可知,支护片网的材料一般为CRB550级冷轧带肋钢筋或GB1499规定牌号的热轧带肋钢筋,取安全系数ns=2,支护片网的许用极限值:
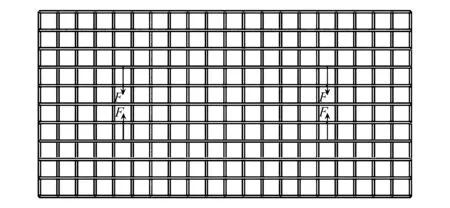
图8 支护片网受力分析
3.4 有限元分析结果
为了保证钻锚机器人布网单元的顺利进行,对布网单元部件以及支护片网进行强度校核计算,主要是基于ANSYS对其进行有限元分析计算[11]。将部件的SolidWorks三维模型导出成ANSYS可以识别的文件,Workbench集成与ANSYS软件中,可以进行对象的静力学分析,得出分析对象的形变量和应力值。将模型导入到Workbench中以后,在Engineering Data中添加前面所确定的材料属性,同时在Mechanical中设定分析对象合适的网格尺寸和网格类型,根据机械手和支护片网的实际受力情况进行添加载荷以及约束,在result中添加所需的分析结果并开始进行分析计算。
完成上述前期处理后,即可进行对象的有限元分析计算,得出对象的计算结果(形变以及应力特性),如图9所示。通过形变图(见图9(a)(c)(e))可以看出,支护片网、机械手指、伸缩导轨的位移量,但是都在允许的范围内,满足布网单元强度要求;通过应力图(见图9(b)(d)(f))可以看出,支护片网的最大应力值约为28MPa,机械手指和伸缩导轨的最大应力值为67MPa、68MPa,三者的应力值都在许用应力范围内,符合材料属性的强度要求。
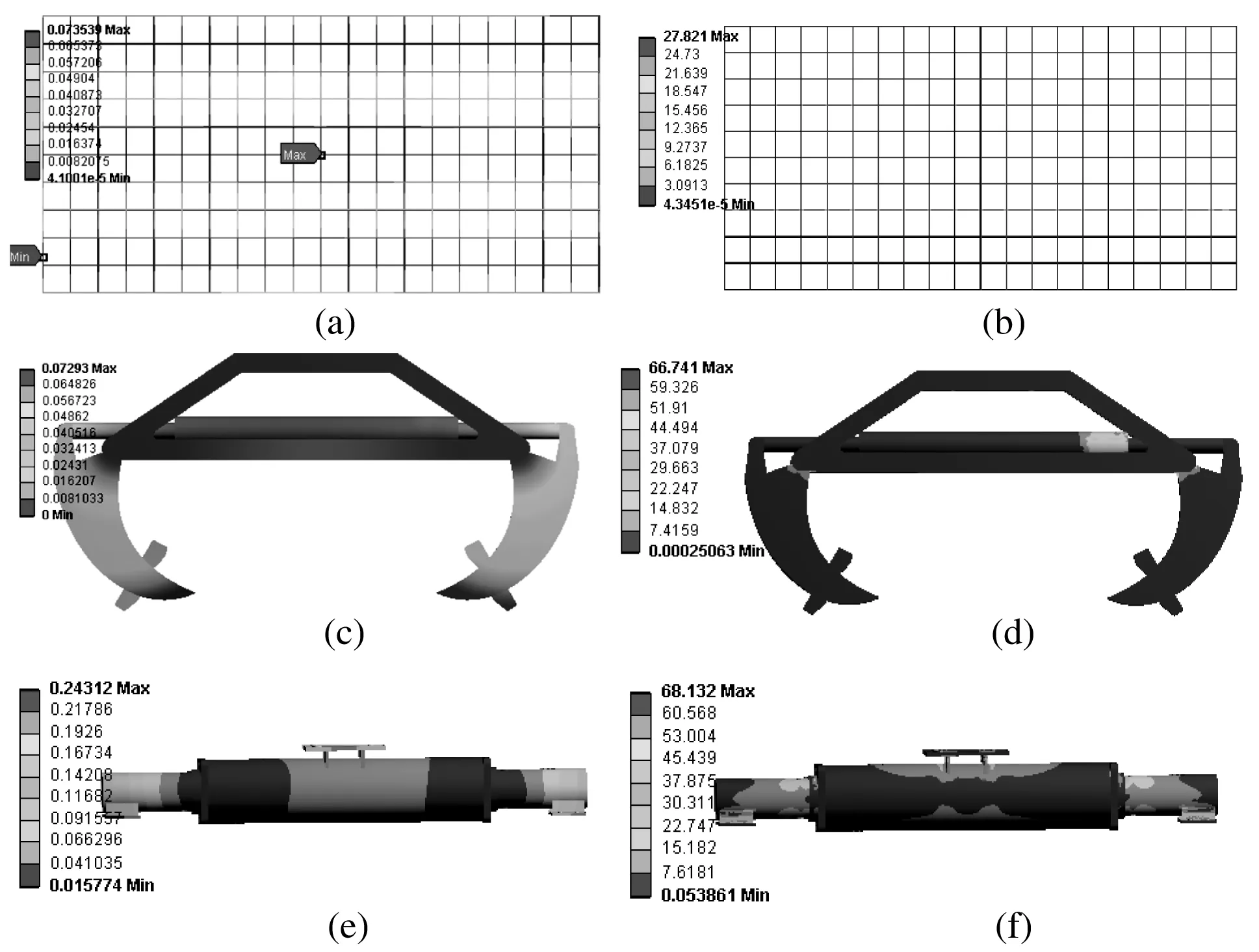
图9 分析结果
4 基于ADAMS钻锚机器人布网单元的运动学仿真
为了验证设计的合理性以及提高实验的效率,利用ADAMS建立布网单元虚拟机并对机器人布网单元的抓网、上顶和侧顶进行运动学仿真。
4.1 钻锚机器人布网单元虚拟机建立
钻锚机器人布网单元的运动仿真以布网单元机械手、机械手臂以及支护片网的坐标系为基础[12]。将SolidWorks模型导出成parasolid格式,在ADAMS中导入parasolid格式的模型并进行保存,在ADAMS中对模型再进行简化处理,减少一些不必要的机构和连接,简化的布网单元虚拟机如图10所示,从而减少前期处理的时间以及仿真时的计算量[13]。之后要对简化后的模型进行添加运动副和运动副的驱动,由于机械手臂关节运动以及机械手关节运动是有顺序可言,因此运动副驱动函数选用的是step(x,x0,h0,x1,h1)进行设定运动副按顺序运动。

图10 简化后的布网单元模型
4.2 运动仿真分析
按照机器人布网单元实际工作的运动情况进行仿真运动,仿真结果如图11、12所示。
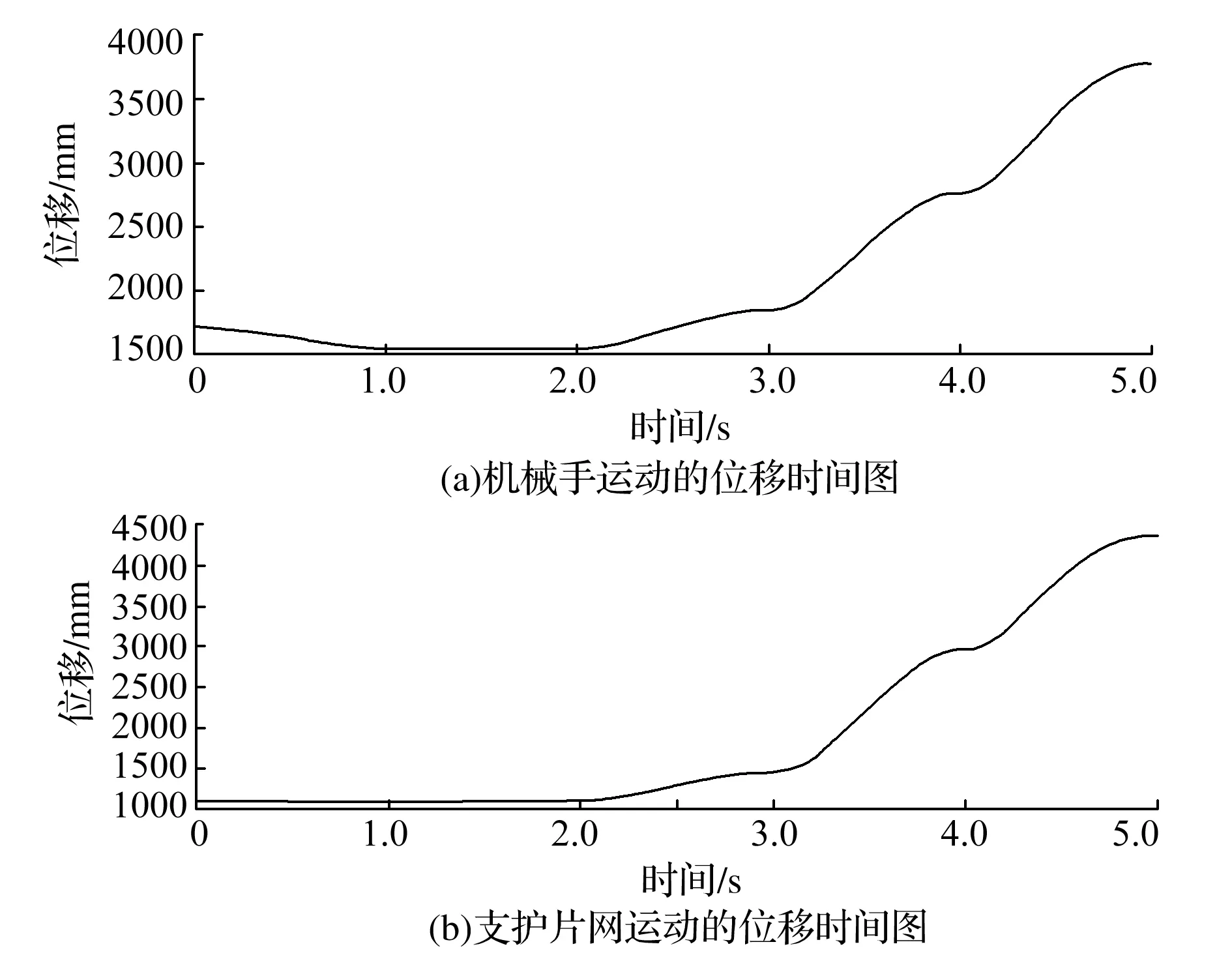
图11 钻锚机器人布网单元上顶曲线图

图12 钻锚机器人布网单元侧顶曲线图
通过对布网单元的上顶和侧顶进行运动学仿真得到的轨迹图可以看出,随着时间的推移,支护片网的位移-时间图与布网单元上顶、侧顶时机械手的位移-时间图在2s后曲线轨迹几乎一致,支护片网的轨迹图也没有出现明显的波动,支护片网的位移时间图的最高位移小于3500mm和5400mm,根据以上可以得出:①机械手可以单张抓取支护片网并随动;②在进行作业时机械手能稳定可靠的运输支护片网;③选取的机械手臂将支护片网能够在巷道中将支护片网顶放到支护位置。
5 结 语
对钻锚机器人布网单元的关键部件进行设计以及选取,详细的说明了布网单元一些部件的作用以及布网单元实现永久支护布网作业的实现方法;对布网单元关键部件机械手进行受力分析并进行有限元分析计算,对机械手的刚度和强度进行校核,校核结果都在许用范围内,满足布网单元布网要求;在ADAMS中建立钻锚机器人布网单元简化模型,并进行了运动学仿真分析,结果表明钻锚机器人布网单元能单张抓取支护片网且能随着布网单元稳定的将支护片网顶放到煤矿井下巷道煤壁上,验证了钻锚机器人布网单元结构的合理性。
