基于CANopen协议的刮板输送机功率协调控制系统研究
2019-06-22耿嘉胜张红娟靳剑兵靳宝全
耿嘉胜,张红娟,靳剑兵,高 妍,靳宝全,胡 浩
(1.太原理工大学 电气与动力工程学院,山西 太原 030024;2.太原理工大学 新型传感器与智能控制教育部与山西省重点实验室,山西 太原 030024;3.山西汾西重工有限公司,山西 太原 030027)
刮板输送机是井下煤矿综采工作面的主要运输设备,与采煤机、液压支架等设备联合作业,煤矿高产高效综采工作面的持续发展对其运行的可靠性、稳定性、安全性提出了越来越高的要求[1]。在刮板输送机的运行过程中,由于头尾电机的机械特性不同、起动措施差异及煤炭开采的随机性等因素,会导致两电机输出功率分配失衡、处于差异过大的负载状态,影响刮板输送机的平稳运行,所以有必要对刮板输送机驱动系统中存在的头尾电机功率协调控制问题进行研究[2,3]。
现场总线CANopen是CiA组织开发和维护的CAN应用层协议,具有透明、清晰、精炼等优点,在基于CAN的自动化系统中居于领导地位[4]。CANopen协议在欧洲获得了广泛的认可和应用,在国内的应用比较少,在刮板输送机的电机功率控制方面实现的就更少。如果刮板输送机控制系统采用CANopen协议,将有利于控制器与电机之间进行实时、准确的数据传递。
针对以上问题,本文以CANopen协议为基础设计了刮板输送机功率协调控制系统,并搭建了实验台,通过测试验证控制方案的可行性。
1 系统总体方案设计
基于CANopen协议的刮板输送机功率协调控制系统,由上位机、CANopen主站、CANopen从站等构成,其系统总体结构如图1所示。其中,CANopen从站的变频器采用速度控制模式,头尾两台变频器分别采集反映负载大小的头尾电机实时输出转矩值,经由CANopen通讯卡、CANopen总线上传到由PLC控制器和CM CANopen模块(以下简称CM模块)组成的CANopen主站,CANopen主站依据转矩信号对负载情况进行判断比较,再经过内部协调控制程序的处理,给出对尾机的转速控制信号,达到头尾电机转矩跟随的效果,实现对刮板输送机头尾电机的功率协调控制。

图1 控制系统总体结构
2 CANopen协议通信原理
CANopen协议在CAN协议的基础上定义了应用层协议,它主要由通信接口、对象字典、用户应用层3个部分组成,其设备模型如图2所示[5]。

图2 CANopen设备模型
通信接口用于在CANopen总线上传送通信对象,主要包括管理报文NMT、服务数据对象SDO、过程数据对象PDO、预定义报文或特殊功能对象四种通信对象。NMT起主站对从站控制和状态监控的作用;SDO起主站对从站参数配置的作用;PDO采用生产者消费者模型,起传输1~8字节长度数据的作用。
对象字典是CANopen协议的核心内容,包括描述设备和其网络行为的所有参数,通常使用电子数据文档EDS对这些参数进行记录。对象字典中的项由一系列子协议来描述,其中子协议DSP402用于驱动控制变频器,定义了变频器的运行模式和用于控制变频器的运行状态转换流程。变频器的运行状态转换流程由主电关闭、主电打开和故障3部分组成,包含9个运行状态和17个状态传输,如图3所示。
变频器的状态转换借助状态传输来实现,状态传输通过对象字典中的6040H控制字和变频器内部事件等方式实现。变频器一开机并完成初始化动作后,进入取消启动状态,可以进行CANopen通信配置变频器参数,主电处于关闭状态,电机未被励磁;经过设定6040H控制字实现状态传输2、3、4后,转换为允许运行状态,主电打开,电机被励磁,变频器按照设定的速度模式启动电机运行。在状态转换过程中变频器只要发生报警,其状态都会进入故障部分。同时,上位机可以通过6041H状态字读取变频器的实时状态[6]。

图3 变频器的运行状态转换流程
用户应用层是连接CANopen从站与主站的桥梁,采用访问对象字典的方式完成对从站的参数设置、状态监控,同时实现设备间高速的数据交换。
3 协调控制策略
以双电机驱动的刮板输送机为研究对象,确定头尾电机的功率协调控制策略。刮板输送机头尾电机的功率与转矩满足一定关系,见式(1)、式(2):
P1=T1ω1
(1)
P2=T2ω2
(2)
式中,P1为头机输出功率,kW;P2为尾机输出功率,kW;T1为头机输出转矩,N·m;T2为尾机输出转矩,N·m;ω1为头机输出轴角速度,(°)/s;ω2为尾机输出轴角速度,(°)/s。
刮板输送机处于平稳工作状态时,头尾处链轮由于刮板链的连接而处于刚性强制耦合状态,链轮与电机又经减速器硬性连接,所以头尾电机的转速在稳态运行中被强制同步。由功率与转矩关系式可知,电机的输出功率与输出转矩成正比关系,所以对功率的控制可转化为对转矩的调节。头尾电机的转速同步时,由于负载多变等因素影响,输出转矩往往并不相同,导致两电机的输出功率不平衡[7]。
为了合理分配负载,采用变频调速方法依据负载变化对尾机转速进行调节,进而改变尾机承担的负载,实现头尾电机输出功率的动态平衡[8]。以尾机转速为控制目标的功率协调控制示意如图4所示。
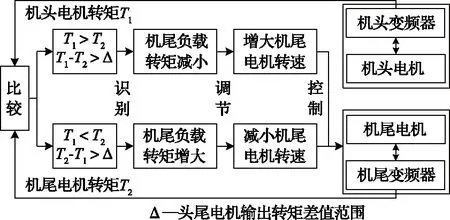
图4 功率协调控制示意
4 控制系统硬件结构与软件设计
4.1 系统硬件结构
CANopen主站由PLC控制器与CM模块组成,CANopen从站由变频器与电机组成。PLC控制器选用S7-1200 CPU 1214C AC/DC/RLY,其具有集成的Profinet接口、灵活的可扩展性和强大的集成工艺功能等特性。通信模块采用HMS公司的CM模块,其能够连接1~16个从站节点,具有256字节输入与256字节输出。CANopen从站选用台达C2000系列向量控制变频器,搭配型号为EMC-COP01的高速CANopen通讯卡,即可实现符合子协议DSP402的CANopen通信。
4.2 CANopen通信初始化设置
为了实现变频器的CANopen通信,首先要完成相关参数的初始化设定。将变频器的节点地址分别设定为2、3,通信速率设定为500kbps,CANopen译码方式选择标准DSP402规范,变频器的频率来源和运转指令来源均设定为CANopen通讯卡。对于CM模块,使用TIA博途软件将节点地址设定为1,通信速率设定为500Kbps,CANopen输入/输出数据大小的设定值由CM模块传输的数据大小决定。
4.3 CM模块的软件组态
控制系统采用SDO配置变频器参数,采用PDO进行实时数据传输。HMS公司提供的CM CANopen Configuration Studio软件用于组态和配置CANopen网络。在进行CM模块的软件组态前,需要先向组态软件导入变频器的EDS文件。
常规的CANopen从站一般预定义4个RPDO和4个TPDO,每个PDO能够传输的最大数据长度为8字节,根据需要选择RPDO1、RPDO2接收数据,TPDO1、TPDO2发送数据。RPDO用于切换变频器的运行状态、改变电机目标转速,TPDO用于传送变频器的各项实时状态数据。CM模块的PDO变量映射参数分配见表1。
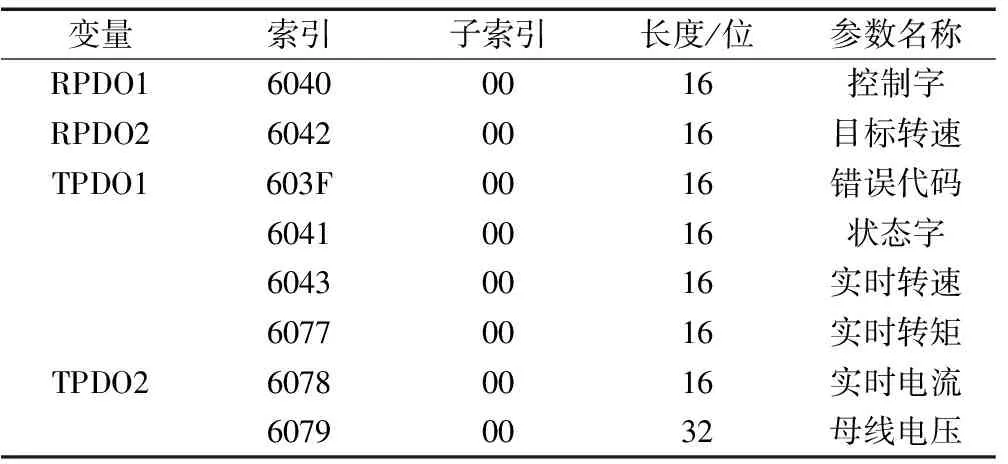
表1 PDO变量映射参数分配
组态软件根据映射参数分配计算生成配置文件,将其下载到CM模块即可完成CM模块的软件组态。
4.4 控制程序设计
控制程序的设计在TIA博途软件中进行,首先创建用于进行PDO数据读写的功能块,通过调用RDREC和WRREC指令块来完成。将RDREC读指令块中的RECORD参数设定为M100.0 BYTE 28,使读取到的数据存放于PLC的M存储区中起始地址为100、长度为28字节的地址区间,长度即为CANopen输入数据大小。同理,将WRREC写指令块中RECORD参数设定为M200.0 BYTE 8。然后创建全局数据块,添加相应参数,利用Swap指令将PDO传输的原始数据转换为全局数据块中可以直接进行设置和读取的用户数据。
接着,在PLC中相应地址修改6040H控制字以切换变频器运行状态。变频器完成初始化后进入取消启动状态,依次设定控制字为0x06、0x0E、0x0F、0x7F可将其切换为允许运行状态,通过6042H目标转速设定电机预期达到的转速。
其后,依据协调控制策略编写程序。设定头尾电机的输出转矩差值范围为Δ,将头尾电机的6077H实时输出转矩T1与T2的差值与Δ进行比较,进而对尾机6043H实时转速进行增减处理,将处理后的值赋予6042H目标转速,以改变尾机转速。
另外,在程序中添加了故障保护功能,通过对头尾变频器返回的603FH错误代码进行实时判断,当其中一台电机因故障停止运转时,控制另一台电机停机,实现对电机的保护。
刮板输送机头尾电机功率协调控制系统的CANopen通信流程如图5所示。

图5 控制系统的CANopen通信流程
5 系统测试与结果分析
在实验室条件下,利用电机、三角带、磁粉制动器与控制器等搭建了刮板输送机功率协调控制系统实验台。磁粉制动器由控制器改变其输出的负载转矩大小,为电机提供模拟负载;头尾电机输出轴借助三角带实现硬连接。给定头尾电机目标转速为750r/min,程序中的Δ为5%(100%为额定转矩)、电机转速改变值为1r、程序循环时间为0.3s。设T1为头机转矩,T2为尾机转矩,V1为头机转速,V2为尾机转速。协调控制系统实验台如图6所示。
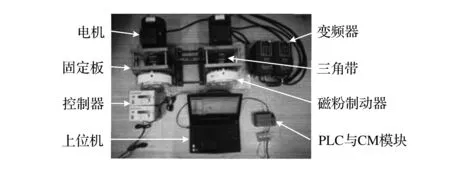
图6 协调控制系统实验台
设定两电机负载转矩保持为50%,由波形可知,T1、T2经过前期的波动后,稳定在40%~60%的动态平衡范围内,表明两台电机在搭建的实验台上可以平稳的运行。头尾电机在负载转矩不变时的转矩如图7所示。
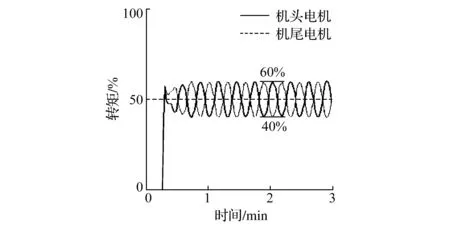
图7 负载转矩不变时的头尾电机转矩
设定两电机起始负载转矩为46%,电机启动1min后,在T时刻机头负载转矩上升至56%。由转速波形可知,启动后,V1快速上升,并最终维持在750r/min,V2上升至750r/min后变为正弦波且波动非常小,符合刮板输送机头尾电机处于平稳运行中转速接近的实际情况。由转矩波形可知,T1、T2在经过前期的波动后,稳定在37%~55%的动态平衡范围内;在T时刻,随着机头负载转矩增加,T1上升,而后T2迅速增加,为头机分担负载转矩,实现尾机对头机转矩的动态跟随;最终T1、T2稳定在41%~61%的范围内,平均转矩均接近于51%,达到了动态平衡状态。头尾电机在负载转矩变化时的转速与转矩分别如图8、图9所示。
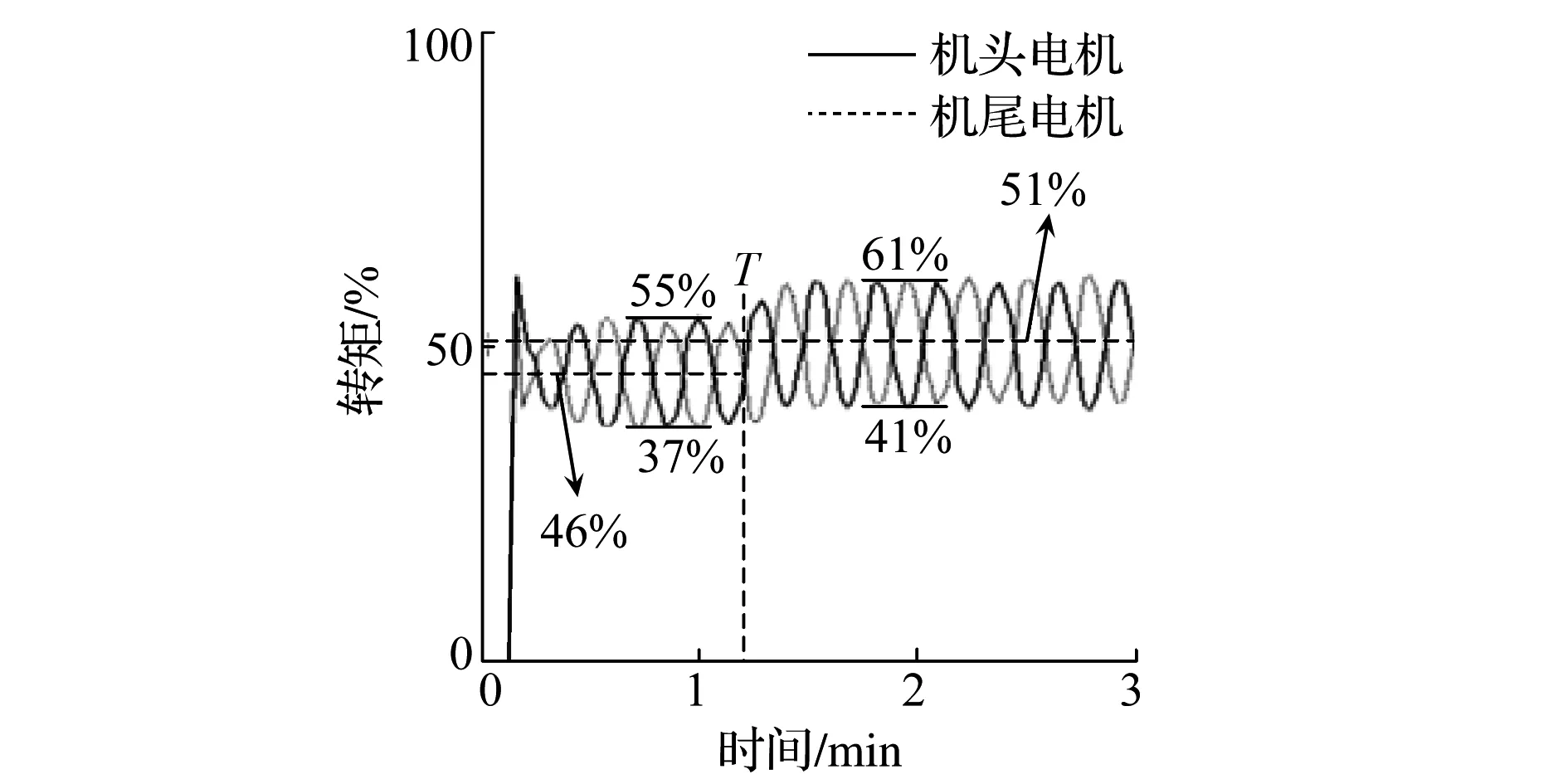
图9 负载转矩变化时的头尾电机转矩
对V2、T1、T2呈正弦波动与T1和T2的幅值差进行理论分析。实验台的两台制动器内部性能存在差异,无法提供绝对相同的负载转矩,使得头尾电机输出轴上的负载转矩有一定差异。给定头尾电机相同目标转速后,需要实时调节电机转速使V1、V2处于动态接近状态,系统才可稳定运行。在实验中启动电机后就引入控制程序对V2进行调节,假设某一时刻T1大于T2,则增大V2,V2增大一定值后超过V1,此时因转速相对变大进而承担转矩变大,即T2大于T1,则又减小V2,V2减小一定值后低于V1,此时T1大于T2,如此循环,系统平稳运行。因此,V2、T1、T2呈正弦波动。头尾电机输出转矩差值范围Δ、电机转速改变值、程序循环时间、负载转矩大小等因素共同影响T1和T2的幅值差,实验中幅值差达到20%时,两电机能够平稳运行。
对其他负载变化情况进行测试,实验表明,刮板输送机功率协调控制系统实验台的两台电机运行平稳,控制系统能够良好地实现对电机的功率协调控制。
6 结 语
以CANopen协议的PDO数据传输方式为基础,采集比较刮板输送机头尾电机的实时输出转矩,对尾机进行变频调速控制,并搭建了控制系统实验台。测试表明,控制系统的CANopen通信数据传输正确,可对尾机的转速进行动态调节,实现头尾电机在负载波动情况下的功率协调控制。刮板输送机头尾电机实现功率协调控制,对于提高其运行效率、减少能源消耗、延长设备使用寿命具有重要意义。本文研究为项目后期进行现场刮板输送机的头尾电机协调控制试验提供了指导思想,为刮板输送机驱动系统的控制研究提供了新方向。
