基于PSO的永磁同步电机SMC控制研究
2019-06-21张庆宇涂群章蒋成明
张庆宇,涂群章,蒋成明,黄 皓,张 帅
(中国人民解放军陆军工程大学野战工程学院,江苏 南京210007)
0 引言
永磁同步电机(PMSM)因其结构简单、功率密度高等优点被广泛应用于电动车辆传动系统中,模型为多变量、强耦合的非线性时变系统[1],采用常规的PID控制不能满足PMSM高性能控制需求[2]。
国内外学者根据永磁同步电机控制系统的特性提出了矢量控制[3]、模糊控制[4]、神经网络控制[5]、弱磁控制[6]、滑模变结构控制[7](SMC)等控制策略。
其中SMC因其抗干扰、实现简单等优点被广泛应用于PMSM控制。文献[8]在传统SMC控制策略的基础上,提出基于NTSM的模糊控制策略,有效提高了电机动态与稳态性能,增强了电机抗干扰能力。文献[9]提出一种积分型SMC控制策略有效提高电机控制精度。
以上控制策略有效提高了电机控制性能,但无法在有效时间内及时反馈电机输出,为了提高永磁同步电机调速系统的动态品质,在建立指数趋近律控制变结构控制[10]基础上采用粒子群算法(PSO)对SMC的参数进行优化。建立控制系统起动与突增负载的仿真与实验模型,结果表明,该控制系统有效提高了系统控制精度、鲁棒性。
1 永磁同步电机数学模型
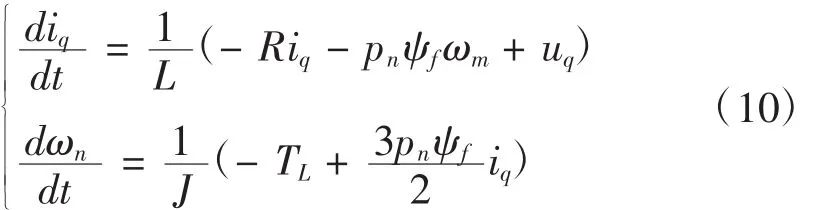
为优化永磁同步电机控制算法,需要建立合适的PMSM数学模型。以表贴式永磁同步电机为分析对象,假定三相PMSM为理想电机。建立同步旋转坐标系d-q下的数学模型,其定子电压为:

其中,ud,uq为d-q坐标系下定子电压的d-q轴分量,id,iq为d-q坐标系下定子电流的d-q轴分量,ψd,ψq为 d-q 坐标系下定子磁链的 d-q 轴分量,Ld,Lq为d-q轴电感分量,ωe为电角速度,R为定子的电阻,ψf为转子磁场等效磁链。
此时电磁转矩方程可写为:

Te为永磁同步电机转矩,pn为电机极对数。
2 PMSM的SMC控制
滑模控制与传统的PID控制区别在于控制的不连续性,使系统结构随时间变化。这种滑动模态变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单[11]等优点。为使正常运动阶段满足滑动模态的可达性条件ss.<0,选用指数趋近律确保趋近运动品质[12-14]。

定义系统的滑模面函数为:

对滑模面函数求导为:

可以求取控制器u为:

建立d-q坐标系下的PMSM的SMC控制模型

其中Ls为定子电感。
采用id=0的转子磁场定向控制方法对表贴式PMSM进行控制,可以获得良好效果。
定义PMSM系统状态变量:

其中,ωref为电机参考转速,通常为常量。ωm为实际转速,对上式微分,得:

则式可为:

定义滑模面函数为:

其中,c为待设计参数。对式求导得:

联立公式(5)、(15)可得控制器的表达式为:

从而得到q轴参考电流为:

控制器包含积分项,可以削弱抖振现象,提高系统控制品质。
3 基于粒子群算法的SMC控制优化
粒子群算法速度、位置更新公式为:

其中,x表示粒子的位置,v表示粒子的速度,w为惯性因子,k1、k2为加速常数,r1r2为[0,1]之间的随机数,pt是粒子迄今为止搜索到的最优位置,Gt是整个粒子群迄今为止搜索到的最优位置。
基于PSO的SMC控制流程[15]如图1所示:

图1 基于PSO的SMC控制流程图
PSO产生粒子群后,将该粒子群中的粒子依次赋给SMC控制器的参数c、ε、q,然后运行控制控制系统Simulink模型不断更新粒子群在控制系统中的速度、得到该组参数对应的性能指标,选用ITAE作为误差评价指标,其定义为:

选取被控对象为SMC控制下的PMSM,其工作原理如图2所示。
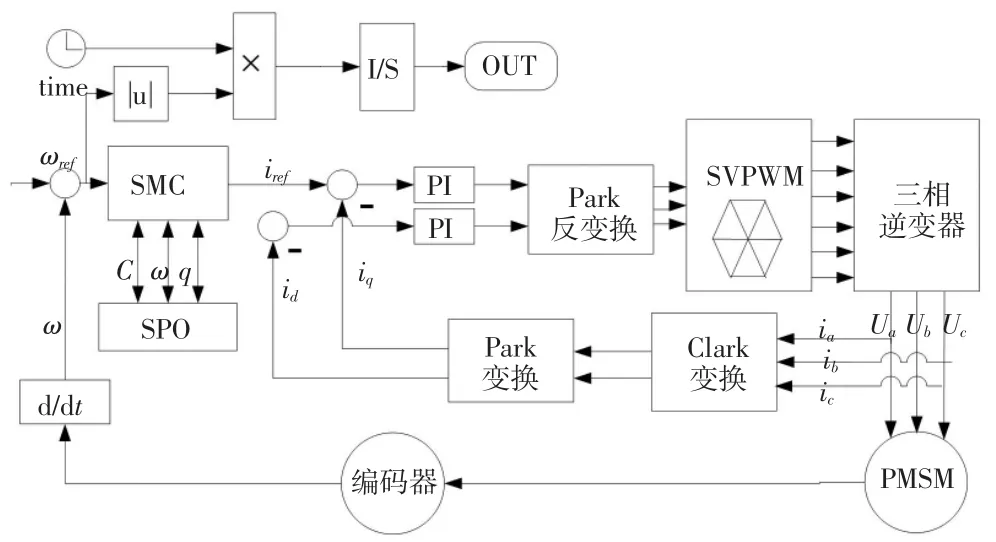
图2 PMSM的PSO-SMC控制系统
4 仿真分析与实验研究
利用Matlab工具箱建立Simulink模型对其进行仿真分析,并在TI公司的TMS320F28035为控制芯片的开发套件上搭建实物系统。PMSM参数为:极对数pn=4,定子电感Ls=8.5 mH,定子电阻R=2.975 Ω,磁链 Ψf=0.175 Wb,动惯量 J=0.003 kg·m2,逆变器开关频率为10 kHz。
图3、图4、图5为系统起动和突增负载的动态响应仿真结果。电机转速1 000 r/min,系统起动在0.2 s时负载转矩从0突增至10 N·m,图3表示了两种控制策略下转速、转矩、三相电流的动态响应仿真结果。

图3 两种控制策略下的PMSM转速响应仿真曲线
图4 为系统起动和突增负载的动态响应实验结果。系统起动在0.2 s时负载转矩从0突增至10 N·m,图4表示了两种控制策略下转速、转矩的动态响应仿真结果。

图4 两种控制策略下的PMSM转矩响应仿真曲线
从图3、图4可以看出,基于PSO的SMC控制器在响应超调量、调整时间、系统稳定性、抗外界扰动能力上均优于传统SMC控制器。
图3表示了基于传统SMC控制与PSO-SMC控制的转速动态响应仿真结果。仿真结果表明,传统SMC控制下的转速响应上升时间tr为0.0108 s,超调量Mp为52.1%;PSO-SMC控制下的转速响应上升时间为0.0102 s,超调量为28.7%.在PSO-SMC控制下转速响应时间降低了约5.6%,超调量降低了约44.9%。在空载运行时间段内,初始时电机在两种控制策略下稍有波动,PSO-SMC控制下的转速波动较小。
图4、图5表示了基于传统SMC控制与PSOSMC控制的转矩、电流动态响应仿真结果。在初始启动与变负载阶段,PSO-SMC控制下的转矩、电流动态响应波动较传统SMC控制较小。
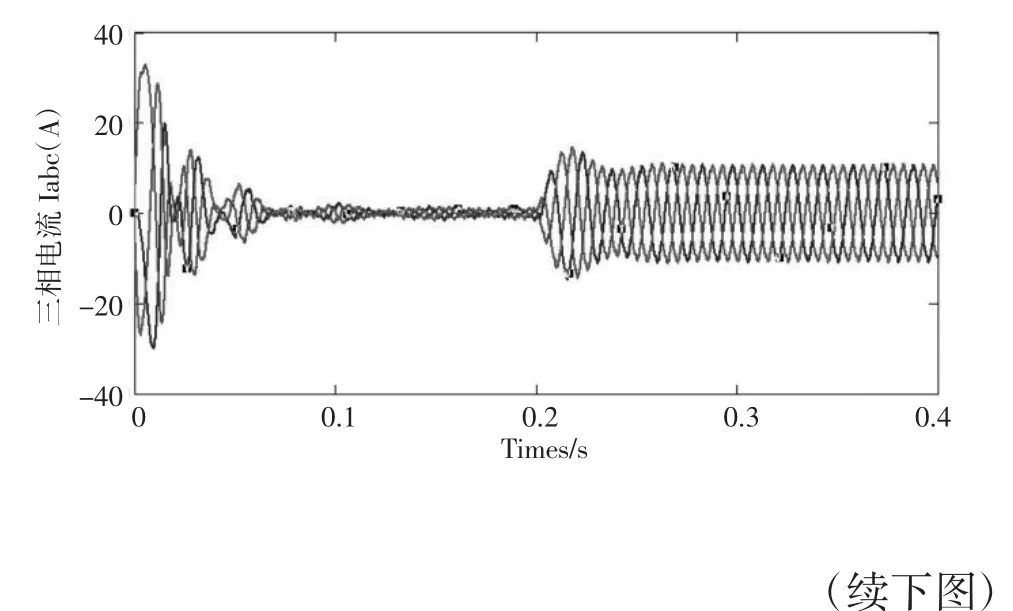

图5 两种控制策略下的PMSM电流响应仿真曲线
图6 、图7为系统起动和突增负载的动态响应实验结果。电机转速1 000 r/min,系统起动在0.2 s时负载转矩从0突增至10 N·m。
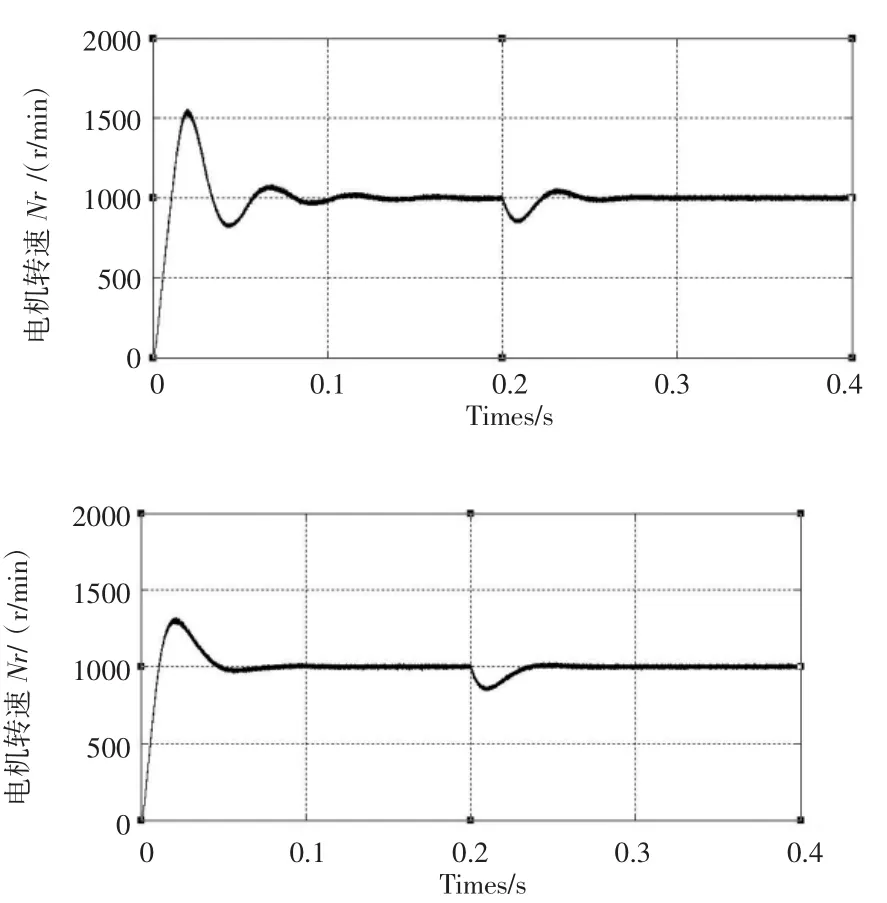
图6 两种控制策略下的PMSM转速响应实验曲线
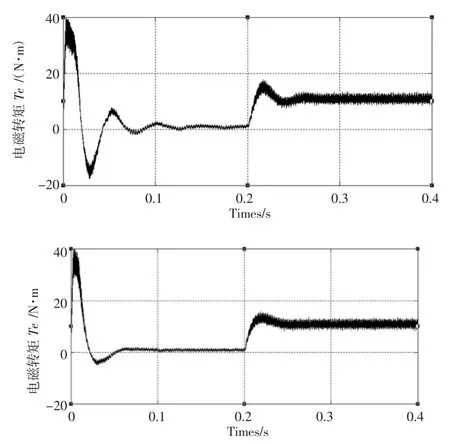
图7 两种控制策略下的PMSM转矩响应实验曲线
由图6、图7可知,基于PSO的SMC控制器在响应超调量、系统稳定性、抗外界扰动能力上均优于传统SMC控制器。
5 总结
针对永磁同步电机控制策略的不足,本文设计一种基于PSO-SMC算法优化的PMSM控制器。首先建立理想永磁同步电机在旋转坐标系d-q下的数学模型,然后建立采用指数趋近律的SMC速度控制模型,采用粒子群算法对SMC控制器参数c、ε、q进行优化,最后采用仿真实验对其性能进行测试。实验表明,该控制方法较传统的SMC控制调制性能更优,响应的超调量和调整时间明显减小,动态和稳态性能明显改善。
