一种ITAE六旋翼无人机双闭环串联
2019-06-20胡浩伟赵庆展田文忠马永建
胡浩伟 赵庆展 田文忠 马永建



摘 要: 针对传统比例积分微分(PID)控制算法在多旋翼姿态控制时因闭环零点所导致的系统超调量增加、反应速度降低的问题,以六旋翼无人机为研究平台,提出一种时间加权绝对误差值积分(ITAE)指标双闭环串联?前馈PID姿態控制算法。结果表明,在该算法下系统的超调量[σ]可控制在2%以下,调节时间[ts]控制在0.5 s以内,可实现对六旋翼无人机高度、偏航角、仰俯角和滚转角的控制,可保证无人机系统的稳定性且使稳态误差接近于0。该算法有效解决了传统PID控制算法在进行姿态控制时存在的超调量大、调节时间长的问题,同时也解决了前馈滤波PID算法控制时出现的超调量降低、调节时间增加的问题,说明算法对六旋翼无人机具有较好的控制效果。
关键词: 六旋翼无人机; 时间加权绝对误差值积分; 双闭环; PID控制算法; 超调量; 姿态控制
中图分类号: TN876?34 文献标识码: A 文章编号: 1004?373X(2019)10?0097?05
A dual?loop series and feed?forward PID attitude control algorithm based on
ITAE for six?rotor unmanned aerial vehicles
HU Haowei1,2, ZHAO Qingzhan2,3, TIAN Wenzhong1,2, MA Yongjian2,3
(1. College of Mechanical and Electrical Engineering, Shihezi University, Shihezi 832003, China;
2. Geospatial Information Engineering Research Center of XPCC, Shihezi 832003, China;
3. College of Information Science and Technology, Shihezi University, Shihezi 832003, China)
Abstract: In order to solve the problems of the increase of system overshoot and decrease of reaction speed caused by the closed?loop zero point during the multi?rotor attitude control of the traditional proportional integral differential (PID) control algorithm, a dual?loop series and feed?forward PID attitude control algorithm based on the time?weighted absolute error value integral (ITAE) index is proposed taking the six?rotor unmanned aerial vehicle (UAV) as the research platform. The results show that, by using the algorithm, the system overshoot [σ] can be controlled below 2% and the adjustment time [ts] within 0.5 s, which can realize the control of the height, yaw angle, pitch angle and roll angle of the six?rotor UAV, and ensure the stability of the UAV system and the steady?state error close to zero; the algorithm can effectively resolve the problems of large overshoot and long adjustment time during the attitude control of the traditional PID control algorithm, and also the problems of the decrease of overshoot and increase of adjustment time during the control of the feed?forward filtering PID algorithm, which indicates that the algorithm has a good control effect on the six?rotor UAV.
Keywords: six?rotor UAV; ITAE; dual?loop; PID control algorithm; overshoot; attitude control
目前多旋翼无人机姿态控制的研究大多集中于四旋翼无人机,主要的控制算法包括:神经网络控制[1]、经典 PID 控制[2]、反步控制[3]、自抗扰控制[4?5]、滑模控制[6?7]、鲁棒控制[8?10]等。相比于四旋翼无人机,六旋翼无人机具有如下的优点:更大的负载能力、更高的稳定性和理想的容错性。在六旋翼无人机的控制算法方面,近年来的研究包括:文献[11]针对姿态控制存在的时间延迟和执行机构动态特性可能引起的响应振荡,利用牛顿第二定律和牛顿?欧拉方程提出基于抗时滞线性自抗扰的六旋翼无人机姿态控制,实现了对六旋翼无人机的姿态稳定跟踪控制,但是该方法的控制结构相对简单,待整定参数较少,与实际工程中的情况差距较大,需在工程实践中进一步验证;文献[12]针对六旋翼无人机位置追踪控制存在的控制精度低、稳定性差等问题,通过将其数学模型线性化处理,设计了基于 PID控制算法的姿态和位置控制器,实现了较好的稳定与跟踪性能,仿真结果表明飞行器能完全追踪给定的参考输入,但是由于实验条件所限,使得实验目标值与实际值曲线有偏差。目前六旋翼无人机姿态控制的主要问题有:
1) 如何降低建模的复杂性以及简化内外不确定性和未知扰动的影响;
2) 如何解决姿态控制延迟和执行机构动态特性可能引起的响应振荡等。
在这些问题的基础上,结合對六旋翼无人机结构和飞行原理的分析,针对传统PID闭环控制算法在多旋翼无人机姿态控制[13?15]时出现的因闭环零点所导致的系统超调量增加、反应速度降低,结合控制系统优化设计理论[16],提出采用ITAE评价指标的双闭环串联?前馈最优PID控制算法对六旋翼无人机悬停模式下的姿态控制问题进行研究。结合性能评价指标ITAE,通过引入串联环节、前馈滤波环节和双闭环反馈环节,有效降低控制系统的调节时间和超调量。
1 六旋翼无人机建模
定义姿态角:偏航角[α]、俯仰角[β]、滚转角[γ]。建立坐标系如图1所示。
图1 坐标系
理想情况下根据Euler?Newton方程、动力学方程可得地面坐标系下六旋翼无人机在三个坐标轴方向的线位移运动方程为:
[x″=C1CαCβSγ+SαSβ-Kxfx′my″=C1SαCβSγ-CαSβ-Kyfy′mz″=C1CβCγ-Kzfz′m-g] (1)
式中:[Sα]和[Cα]分别表示[sin α]和[cos α],此规则同样适用于[β],[γ]。
角运动方程如下:
[α″=lC4-Kzfα′Izβ″=lC3-Kyfβ′Iyγ″=lC2-Kxfγ′Ix] (2)
六旋翼无人机参数如表1所示。
2 ITAE指标双闭环串联?前馈PID控制算法
针对传统PID控制,当存在误差带时,系统超调量较大,调节时间较长,无法满足系统的控制要求等问题,以及ITAE指标[17]的前馈滤波PID算法控制下4个目标量的调节时间较长的问题。基于此,本文提出一种基于ITAE评价指标双闭环串联?前馈PID控制算法。双闭环串联?前馈PID控制见图2。
图2 双闭环串联?前馈PID控制
理想条件下,视六旋翼无人机悬停状态的空气阻力为线性变量,机体相对于地面坐标系近似静止。由式(1)、式(2)得,则系统对应的姿态传递函数[Gs]分别为:
高度传递函数:
[GZs=1sms+Kzf] (3)
偏航传递函数:
[Gαs=lsIzs+lKzf] (4)
俯仰传递函数:
[Gβs=lsIys+lKyf] (5)
滚转传递函数:
[Gγs=lsIxs+lKxf] (6)
因此,进行高度控制时前馈滤波环节的传递函数为:
[GZps=57.47s2+12.35s+57.47] (7)
进行偏航控制时前馈滤波环节的传递函数为:
[Gαps=56.88s2+12.23s+56.88] (8)
进行俯仰控制时前馈滤波环节的传递函数为:
[Gβps=136.8s2+29.41s+136.8] (9)
进行滚转控制时前馈滤波环节的传递函数为:
[Gγps=136.8s2+29.41s+136.8] (10)
取串联校正环节[Gns]为:
[Gns=1+s2+s] (11)
取内环增益:[K内=0.001];外环增益:[K外=1]。
3 算法仿真
利用对比分析法,设置实验组为ITAE评价指标双闭环串联?前馈PID控制。对照组分别为:传统PID控制和ITAE指标前馈滤波PID控制。输入信号为单位阶跃信号,采用经验法、试凑法进行参数整定。整定结果如表2所示。系统的输出对比曲线如图3所示。根据系统的仿真结果,得出3组方法对应的系统参考指标分析表如表3所示。


结合图3和表3,分析本文提出的ITAE指标双闭环串联?前馈PID控制方法相对于传统PID控制方法和ITAE前馈滤波PID控制方法的改善情况。分析结果如表4所示。通过对算法进行仿真分析发现:

1) 圖3中,传统PID控制算法的系统动态响应超调量[σ](除偏航角)均在20%以内,调节时间[ts≤2 s],在误差允许范围内,稳态误差均为0;但是当误差带[Δ=2%]时,系统的调节时间应该小于1 s,超调量应该小于5%。由此可知,虽然传统PID控制中的4个目标量的调节时间符合要求,但是系统超调量却未满足要求。其主要原因是系统结构单一,没有有效抑制系统震荡的环节,致使传统PID方法进行六旋翼无人机姿态控制时超调量较大。ITAE指标下前馈滤波PID控制算法的系统动态响应超调量[σ]在10%以内,调节时间[ts≤1.5 s],在误差允许范围内,稳态误差均为0。相比于传统PID控制,引入前馈滤波的ITAE指标PID控制算法对4个被控目标量在超调量的控制上有较好的效果,但是系统的调节时间却有不同程度的延长。
这主要是由于引入的前馈滤波环节同时也带来了闭环零点,闭环零点的存在会增加系统的调节时间。所以引入前馈滤波的ITAE指标PID控制算法并非是六旋翼无人机姿态控制系统的理想控制方法。本文提出的ITAE指标双闭环串联?前馈PID控制算法的系统动态响应超调量[σ]均在5%以内,调节时间[ts≤0.5 s],误差允许范围内,稳态误差均为0。相比于传统PID控制算法和引入前馈滤波的ITAE指标PID控制算法,本文的方法对无人机姿态控制不论是在调节时间还是在超调量上都有较好的控制效果,在不同程度上改善了这两类算法在超调量和调节时间控制上存在的不足。
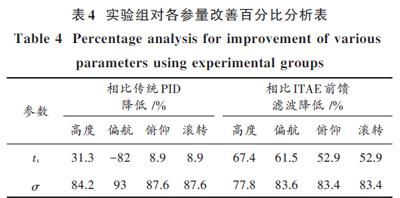
图3 实验仿真图
2) 表4中,本文的ITAE指标双闭环串联?前馈PID控制算法,在结构上引入串联环节和前馈滤波环节对于传统PID 控制算法和引入前馈滤波的ITAE指标PID控制算法在无人机姿态控制时出现的超调量大、调节时间长都具有较好的改善效果。对传统PID 控制算法调节时间的改善上,在俯仰控制和滚转控制上接近9%,高度控制上超过31%;超调量的改善上,在俯仰控制和滚转控制上超过87%,高度控制上超过84%,在偏航控制上超过90%。对引入前馈滤波的ITAE指标PID控制算法调节时间的改善上,在俯仰控制和滚转控制上超过50%,在偏航控制和高度控制上超过60%;超调量的改善上,偏航控制、俯仰控制和滚转控制上均超过了83%,高度控制上达到77%以上。因此,本文提出的ITAE指标双闭环串联?前馈PID控制算法能较好地改善传统PID控制算法和引入前馈滤波的ITAE指标PID控制算法在无人机姿态控制时出现的控制效果不理想的情况,在不同程度上优化了PID算法在无人机姿态算法控制中的应用。
3) 本文提出的ITAE指标串联?前馈双闭环 PID控制算法,由于双闭环控制结构引入的闭环零点会造成调节时间的延长,为了使系统反应灵敏、调节速度加快和稳态误差减小,采用经验凑试法,通过增大比例项系数的方式来进行调节,使得进行高度控制时比例项的值为390,大于其他两种算法对应的值。相比于传统PID控制,本文提出的控制算法由于双闭环结构引入的闭环零点和串联环节的存在使得系统的调节时间增加,使得在偏航控制时的调节时间为0.42 s,大于传统PID控制时对应的0.23 s。
4 结 论
本文采用ITAE指标双闭环串联?前馈PID控制算法对六旋翼无人机悬停模式下的姿态控制进行研究,选择两种算法进行实验对照。结果表明,文中提出的ITAE指标双闭环串联?前馈PID控制算法既能有效解决传统PID控制算法在进行姿态控制时存在的超调量大、调节时间长的问题,同时也能解决因引入前馈滤波进行PID控制时出现的降低超调量却增加调节时间的问题,有效地提高了控制质量,证明本文所提出的算法仿真效果优于对照组算法仿真效果。本文在六旋翼无人机悬停模式下姿态控制算法研究上,具有一定的合理性和有效性,但是仍旧存在以下局限性:
1) 在进行悬停状态下的姿态建模时,在假设的基础上直接进行线性化处理,忽略各参量之间的耦合联系,与实际情况有差别;
2) 为了降低分析、计算的复杂度,文中将六旋翼无人机系统近似处理为标准三阶系统,将其他因素进行理想化处理,在算法处理上缺乏严谨性。
针对以上的不足,对于ITAE指标双闭环串联?前馈PID控制算法仍需进行后续的研究,以期找出控制品质更加优良的改进算法。
注:本文通讯作者为赵庆展。
参考文献
[1] 鲜斌,张浩楠.基于神经网络的小型无人直升机非线性鲁棒控制设计[J].控制与决策,2018,33(4):627?632.
XIAN Bin, ZHANG Haonan. Nonlinear robust control for a small unmanned helicopter based on neural network [J]. Control and decision, 2018, 33(4): 627?632.
[2] 马娅婕,彭攀来,刘国庆,等.基于梯度下降法和双环PID的四旋翼飞行器的研究与设计[J].现代电子技术,2017,40(18):11?14.
MA Yajie, PENG Panlai, LIU Guoqing, et al. Research and design of quadrotor based on gradient descent method and double?loop PID [J]. Modern electronics technique, 2017, 40(18): 11?14.
[3] 魏青铜,陈谋,吴庆宪.输入饱和与姿态受限的四旋翼无人机反步姿态控制[J].控制理论与应用,2015,32(10):1361?1369.
WEI Qingtong, CHEN Mou, WU Qingxian. Backstepping?based attitude control for a quadrotor UAV with input saturation and attitude constraints [J]. Control theory & applications, 2015, 32(10): 1361?1369.
[4] 李毅,陈增强,孙明玮,等.离散型自抗扰控制器在四旋翼飞行姿态控制中的应用[J].控制理论与应用,2015,32(11):1470?1477.
LI Yi, CHEN Zengqiang, SUN Mingwei, et al. Attitude control for quadrotor helicopter based on discrete?time active disturbance rejection control [J]. Control theory & applications, 2015, 32(11): 1470?1477.
[5] 胡琼,费庆,耿庆波,等.基于自抗扰控制技术的实时飞行仿真研究[J].控制工程,2014,21(4):537?546.
HU Qiong, FEI Qing, GENG Qingbo, et al. Real?time simulation of flight control system based on ADRC technique [J]. Control engineering of China, 2014, 21(4): 537?546.
[6] 刘锦涛,吴文海,李静,等.四旋翼无人机SO(3)滑模变结构姿态控制器设计[J].控制与决策,2016,31(6):1057?1064.
LIU Jintao, WU Wenhai, LI Jing, et al. Sliding mode variable structure attitude controller design of quadrotor UAVs on SO(3) [J]. Control and decision, 2016, 31(6): 1057?1064.
[7] 尤元,李闻先.四旋翼无人机设计与滑模控制仿真[J].现代电子技术,2015,38(15):80?83.
YOU Yuan, LI Wenxian. Design of quadrotor UAV and its sliding mode control simulation [J]. Modern electronics technique, 2015, 38(15): 80?83.
[8] 李远伟,王常虹,伊国兴,等.涵道式无人机鲁棒控制系统设计[J].电机与控制学报,2010,14(9):81?87.
LI Yuanwei, WANG Changhong, YIN Guoxing, et al. Robust control system design for a aducted fan unmanned aerial vehicle [J]. Electric machines and control, 2010, 14(9): 81?87.
[9] FRANCO A L D, BOURLES H, DE PIERI E R, et al. Robust nonlinear control associating robust feedback linearization and H∞ control [J]. IEEE transactions on automatic control, 2006, 51(7): 1200?1207.
[10] KIM J, KANG M S, PARK S. Accurate modeling and robust hovering control for a quadrotor VTOL aircraft [J]. Journal of intelligent and robotic systems, 2010, 57(1): 9?26.
[11] 蔡敏,王思明.抗时滞LADRC的六旋翼飞行器姿态控制[J].科学技术与工程,2017,17(6):77?82.
CAI Min, WANG Siming. Attitude control of six?rotor helicopter based on anti?delay linear active disturbance rejection control [J]. Science technology and engineering, 2017, 17(6): 77?82.
[12] 王伟,邱启明.六旋翼飞行器建模及位置跟踪控制[J].电子器件,2014,37(3):507?513.
WANG Wei, QIU Qiming. Modeling and position tracking control for six?rotors [J]. Chinese journal of electron devices, 2014, 37(3): 507?513.
[13] 冯新强,韦根原.基于ITAE的时滞过程内模PID滤波器参数优化[J].电力科学与工程,2015,31(10):40?43.
FENG Xinqiang, WEI Genyuan. Internal model control PID optimization for process with time?delay based on ITAE index [J]. Electronic power science and engineering, 2015, 31(10): 40?43.
[14] 冀亮,钱正洪,白茹.基于四元数的四轴无人机姿态的估计和控制[J].现代电子技术,2015,38(11):112?116.
JI Liang, QIAN Zhenghong, BAI Ru. Attitude estimation and control of quaternion based quad?axis UAV [J]. Modern electronics technique, 2015, 38(11): 112?116.
[15] BERTRAND S, GUENARD N, HAMEL T, et al. A hierarchical controller for miniature VTOL UAVs: design and stability analysis using singular perturbation theory [J]. Control engineering practice, 2011, 19(10): 1099?1108.
[16] 李一波,宋述锡.基于模糊自整定PID四旋翼无人机悬停控制[J].控制工程,2013,20(5):910?914.
LI Yibo, SONG Shuxi. Hovering control for quadrotor unmanned helicopter based on fuzzy self?tuning PID algorithm [J]. Control engineering of China, 2013, 20(5): 910?914.
[17] 胡寿松.自动控制原理[M].6版.北京:科学出版社,2012.
HU Shousong. Principle of automatic control [M]. 6th ed. Beijing: Science Press, 2012.