人车分离无人驾驶拖拉机关键技术研究
2019-06-19欧阳劲志杨辉罗小全
欧阳劲志 杨辉 罗小全
【摘要】本文介绍了国内外无人驾驶拖拉机的技术发展水平,提出了无人驾驶拖拉机电控系统的设计思路,简述了系统关键技术的解决方案,论述了系统的工作模式和工作原理。
【关键词】无人驾驶;路径规划;自动转向
随着计算机技术、全球卫星定位技术、地理信息技术的发展以及精细农业的兴起,国内外许多研究机构开始围绕无人驾驶拖拉机展开研究工作。在国内,针对拖拉机人车结合的智能驾驶的研究较多,人车分离的无人驾驶的研究较少。无人驾驶拖拉机能实现精准作业,提高土地利用率;降低人工运行费用,提高生产效率;减少燃油消耗,实现节能减排;大区域作业技术优势突出。
一、系统架构与关键技术
(一)系统架构
无人驾驶拖拉机电控系统由远程控制分系统、路径规划分系统、紧急避险分系统、机具悬挂分系统、导航定位分系统、变速转向分系统等几个分系统组成,各分系统又包含不同的子系统,实现特定的功能。各分系统简介如下:
1.远程控制分系统包含有远程监视和远程遥控子系统。远程监视子系统通过安装在拖拉机上的摄像头对周围的图像信息进行采集,将图像信息无线传输至位于远端的显示屏上,使操作人员能观察到拖拉机周边的环境。远程遥控子系统的功能是,实现农机人员操纵远程控制终端,使拖拉机完成转弯、行驶等行为。
2.路径规划分系统包含路径规划子系统。路径规划子系统支持多种路径指导模式,如平行线指导、曲线指导、自适应曲线、中心点环线指导等模式。
3.紧急避险分系统具有避免拖拉机撞上水井、树木、行人的功能。复合探测子系统包含有距离传感器、红外传感器等探测终端。距离传感器探测前方是否有障碍物,红外传感器探测前方是否有行人,当它们探测到障碍物或人进入危险距离时,会发送信号给CPU,实现紧急停车熄火,以免发生事故。
4.机具悬挂分系统包含机具起降子系统和机具动力子系统。机具起降子系统控制电磁阀的开闭,使液压装置完成机具的升降、悬浮等动作。机具动力子系统通过控制动力输出轴离合器的结合或分离,控制拖拉机给旋耕机等农机具的动力输出。
5.导航定位分系统包含DGPS导航和姿态纠偏子系统,其功能是实现拖拉机导航定位。
6.变速转向分系统包含自动变速子系统和自动转向子系统,它们负责执行CPU所传递的指令,改变拖拉机的行驶速度和行驶方向。系统中安装有发动机转速传感器、转向角度传感器、制动压力传感器、离合位移传感器等探测终端,实时监测行车状态,反馈给CPU,实现变速转向的闭环控制。
(二)关键技术
1.DGPS导航。DGPS(差分GPS)是针对改善GPS利用码定位的精度而发展出來的系统,采用相对定位的原理,对两个不同测量点利用差分方式消去大部分共同误差而获取较高的精度。本系统采用DGPS来获取高精度位置信息,实现方法是:在一个精确的已知位置(基准站)上安装GPS监测接收机,计算得到基准站与GPS卫星的距离修正值,基准站将此数据通过无线通讯传送给拖拉机CPU,对车载GPS接收机的测量值作误差修正,利用修正后的数据计算出自身的位置,消去公共误差,从而获得更精准的路径导航。
2.地形补偿。为适应高精度的需要,地形补偿技术被引入系统,通过姿态纠偏模块中陀螺仪所采集到的拖拉机的偏航、倾斜、爬坡、下坡等状态信息,补偿不同地形对拖拉机行进产生的影响,减小机车行驶轨迹和规划路径之间的偏差,从而精确控制拖拉机的行驶路径。
3.路径规划。路径规划是用来指导机动车位置的一种方法。规划的路径应满足车辆转向的要求,不能超过车辆最小转弯半径;同时必须考虑耕种、播种等作业形式对车辆行驶路径的不同要求。为满足要求,无人驾驶拖拉机电控系统中的路径规划系统应具有数据存储功能;电子地图的显示、缩放、平移的功能;DGPS测得的位置信息在电子地图中的定位、跟踪功能;行驶路径、规划路径的坐标显示功能;作业区域的路径规划功能等。
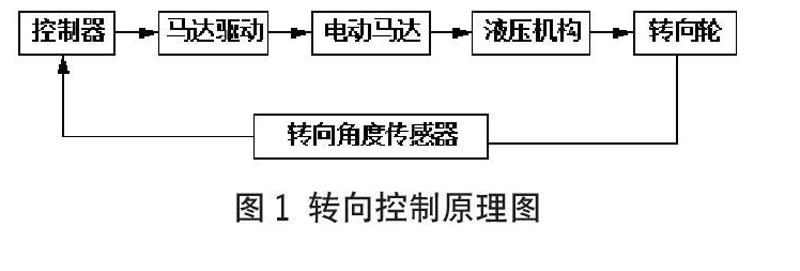
4.自动转向。电动机传动技术被引入转向系统中,通过一个小的电动马达来驱动拖拉机的液压转向装置,与转向角度传感器和控制电路一起实现自动转向功能。转向角度传感器测量转向轮与主车轴之间的角度,这个角度定义了车辆将行驶的方向。控制器接收角度传感器的反馈信号,并通过主程序循环调用,实现对拖拉机转向闭环控制,原理图如图1所示。
5.自动变速。该系统采用ARM7系列LPC2294芯片作为控制器,子系统主要分为四个模块:一是A/D采集模块:对发动机转速传感器、制动压力传感器、离合位移传感器、转向角度传感器的信号进行A/D转换和数据采集。二是GPIO(通用输入输出)模块:控制继电器的导通和截止,控制各液压装置完成不同动作。三是PWM输出模块:控制步进电机驱动器,驱动油门步进电机运转,调节油门大小。四是CAN通讯模块:通过CAN总线与上位机进行通讯,接收上位机的目标控制信号。系统设计如图2所示。
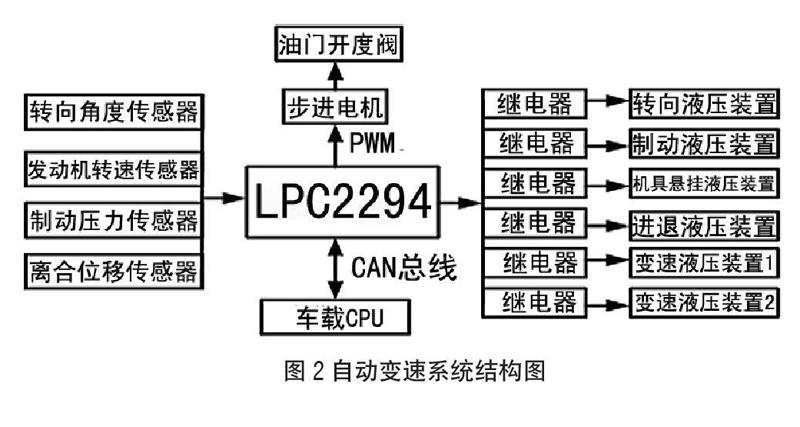
该系统由控制器接收各传感器的反馈信号,结合芯片内置的控制策略,控制继电器的通断和步进电机的运转,实现拖拉机加速、匀速、减速、制动、转向、机具升降、前进后退和换档变速等一系列动作。
二、系统组成及工作原理
(一)系统组成
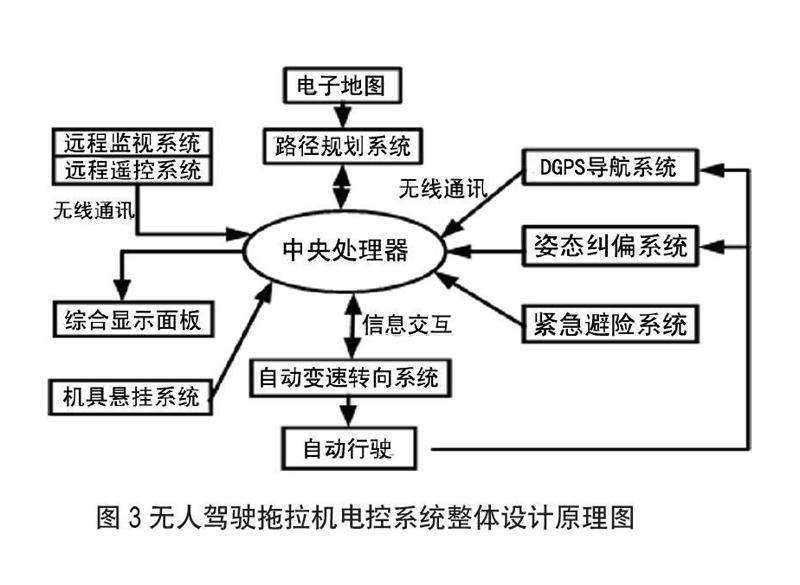
无人驾驶拖拉机电控系统,包括中央处理器、远程遥控系统、远程监视系统、机具悬挂系统、紧急避险系统、路径规划系统、DGPS导航系统、姿态纠偏系统、自动变速转向系统及综合显示面板等部分。无人驾驶拖拉机电控系统整体设计如图3所示。
(二)拖拉机工作原理
1.拖拉机自主工作状态。将做好的电子地图导入中央处理器中,中央处理器根据地块边界规划出合理的作业路径。在拖拉机开始行驶时,DGPS导航系统测得动态数据,通过无线通讯传送到拖拉机中央处理器,计算得到位置信息。通过姿态纠偏系统获取拖拉机的行车状态信息,并将状态信息传送到中央处理器运算,补偿DGPS导航系统使测得的位置信息更准确。中央处理器和路径规划系统实现信息交互,中央处理器将补偿后的位置信息与之前在电子地图上已规划好的路径进行对比,得到偏差值,将偏差值处理后,通过自动变速转向系统来控制无人驾驶拖拉机的行驶速度和方向。当拖拉机进入到耕作路径时,中央处理器发出指令,接通动力输出离合,同时控制悬挂系统中的农机具降至工作深度,拖拉机开始作业,耕作任务完成后,升起农机具,断开动力输出离合。在系統中应用角度传感器、发动机转速传感器、位置传感器、压力传感器等传感器测量行车信息,并将行车信息转换为电信号传递给控制器进行运算,再由控制器发出指令控制自动变速转向机构,构成闭环系统,实现对拖拉机驾驶的智能控制。中央处理器实时控制综合控制面板显示的内容,如车辆的行车信息等。
2.拖拉机应急工作状态。拖拉机行进中,前方若出现障碍物或行人,且与拖拉机的距离进入危险范围时,系统视为紧急情况。安装在拖拉机前方的红外传感器测量前方是否有行人,距离传感器测量与人或障碍物的距离。中央处理器循环查询传感器的测量信息,根据CPU内置的控制策略,作出判断和决策。当拖拉机与行人或障碍物的距离进入危险范围时,CPU发出指令,紧急制动熄火,确保行车安全。同时,发出信号给远程控制终端,提醒农机操作人员出现紧急情况。
3.拖拉机遥控工作状态。远程监视系统通过车前后方的摄像头获取图像信息,通过无线通讯传送给控制室内的显示屏上,当出现紧急情况意外停车时,方便调取图像查看原因。远程控制系统通过无线通讯与中央处理器连接,中央处理器对接收到的指令进行运算,控制变速转向机构完成相应动作,实现对无人驾驶拖拉机的远程控制。
三、结语
该无人驾驶拖拉机电控系统把DGPS导航、地形补偿、路径规划、自动变速与转向等几项关键技术有机地结合起来,借助于计算机软硬件系统和执行机构,实现拖拉机的无人驾驶。该课题目前已获得国家专利,为将来实现“一人多车”集群作业奠定了技术基础。为便于设计方案的更新,该电控系统采用模块化结构设计。为便于扩展应用新技术,系统预留了充足的硬件端口,其设计方案和研究方法可为同类研究提供思路。
