基于Hessian矩阵的线结构光光条中心提取
2019-06-15陈念郭阳宽张晓青
陈念 郭阳宽 张晓青

摘要:本文以傳统的Steger算法为前提,对基于Hessian矩阵的光条纹中心提取算法进行了优化,并通过实验验证了光条中心提取的效果。
关键词:线结构光;图像预处理;Steger算法
中图分类号:TP39 文献标识码:A 文章编号:1007-9416(2019)03-0126-02
0 引言
通过激光三角法拍摄的光条图像一般都具有一定的像素宽度。为实现准确的测量,需要提取条纹中心线。目前使用较多的激光条纹中心提取算法有极值法、灰度重心法、骨架细化法、方向模板法、曲线拟合法等[1-4],但以上方法都有一定的缺陷。本文提出一种基于Steger算法的光条纹中心提取方法。
1 线激光光条图像的特点
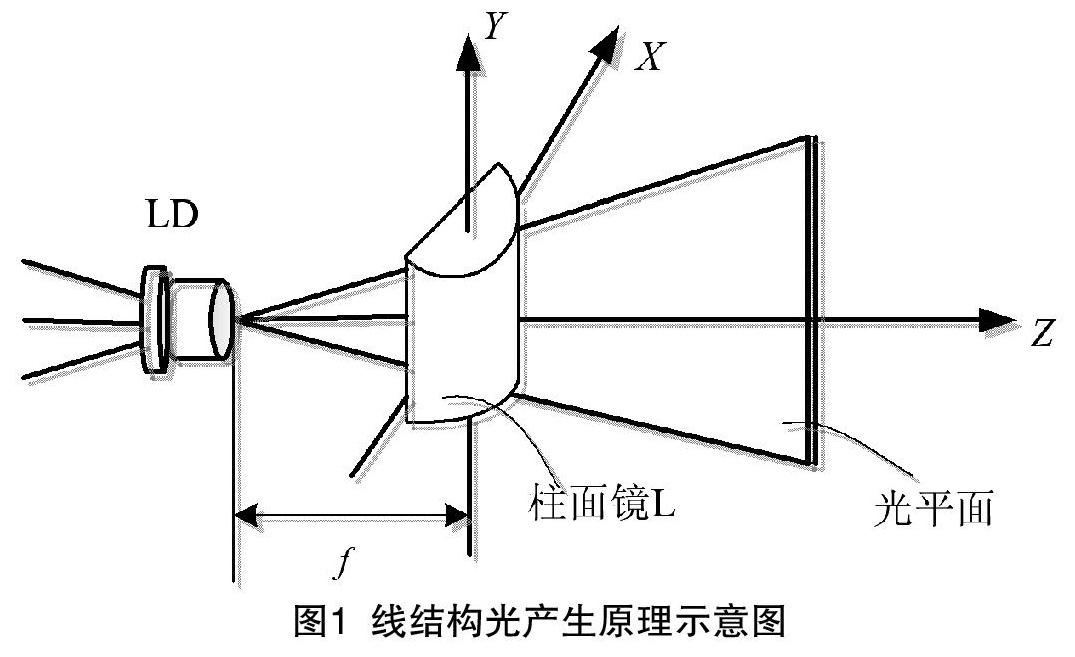
线激光器发射一个连续的光平面与待测物表面的交线是有一定宽度的光条,该光条的横截面光强分布近似服从高斯分布[5],如图1所示。
G(x)= (1)
式中u为数学期望,σ为均方差。
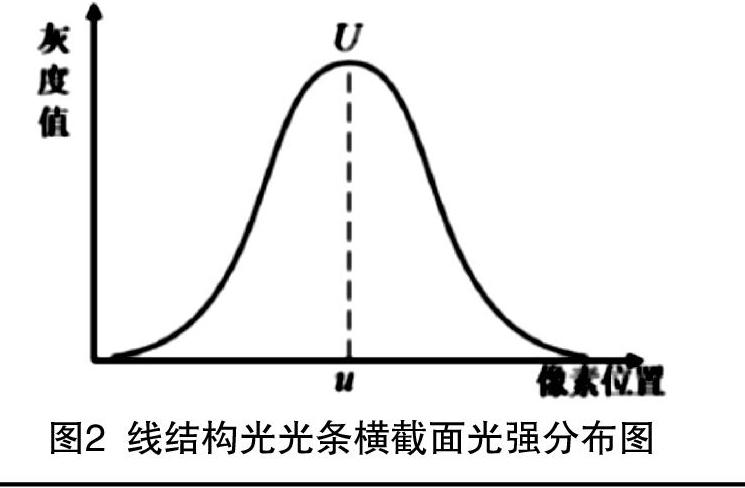
光条图像及灰度强度分布如图2所示,光条区域的灰度值近似呈高斯分布。
2 光条图像的预处理
相机所拍摄的光条图像包含了许多噪声,且发生了变形,光条强度受到了调制,给光条中心提取增加了困难[6]。因此,在提取激光光条中心前需对光条图像进行以下预处理:
2.1 光条区域提取
本文采取的方法是在原始图像中设定一个包含所需激光光条图像的较小的矩形区域,然后将该矩形区域的图像分离出来,大大减小了计算量。
2.2 图像滤波
由于光条图像受测量环境、相机内部产生的热噪声等因素的影响,严重影响光条提取结果及测量系统的准确性。
经对比,中值滤波效果较好。但滤波后使部分光条图像信息被滤除掉了。为了保证信息的完整性,需对滤波后的图像再次进行形态学滤波,如图3所示。
3 Steger法提取光条纹中心线
通过Hessian矩阵得到光条法线方向,利用泰勒展开得到激光条纹的中心点的亚像素位置[7]。激光条纹上一点(x,y),Hessian矩阵为:
H(x,y)=Z(x,y)= (2)
式中:g(x,y)为二维高斯函数。rxx表示图像沿x的二阶偏导数,其他参数类似。设(nx,ny)为Hessian矩阵所求的单位向量,以点(x0,y0)为基点。对激光条纹横截面上灰度分布函数进行二阶泰勒展开,激光条纹横截面上点(x0+tnx,y0+tny)的灰度。
Z(x0+tnx,y0+tny)=Z(x0,y0)+N(rx,ry)T+NH(x,y)NT/2 (3)
式中:N=(tnx,tny),(rx,ry)由图像像素点z(x,y)分别与高斯核卷积得到,即: (4)
由=0,根据(3)式得到:
t= (5)
则光条中心点的精确位置为:(x0+tnx,y0+tny)。
Steger算法微分形式高斯核函数进行卷积,求取激光条纹图像上每一个像素点的Hessian矩阵。高斯函数的均方差σ越大,光条图像平滑效果越好,但是σ过大会使光条图像模糊虚化,图像信息失真严重,而σ值的确定与激光条纹的宽度有关,即:σ<,其中ω为光条宽度。本文所测多楔带,线激光垂直打在多楔带横截面上,由于多楔带的每个楔面形状一样,所以整条光条的宽度是相同的,所以σ值固定。光条中心提取结果,如图4所示。
4 实验验证
为验证本文算法的有效性,对测量对象--多楔带的外形参数进行测量并与影像仪的测量结果进行对比,见表1。
参考文献
[1] 张远,张广军,江洁.Steger算法的FPGA递归逻辑结构设计与实现[J].传感器与微系统,2008,27(9):78-81.
[2] 王泽浩,张中炜.自适应方向模板线结构光条纹中心提取方[J].激光杂志,2017(1):60-64.
Line Structure Light Strip Center Extraction Based on Hessian Matrix
CHEN Nian,GUO Yang-kuan, ZHANG Xiao-qing
(Beijing Key Laboratory of Photoelectric Testing Technology, Beijing Information Science and
Technology University, Beijing 100192)
Abstract:The light stripe center extraction algorithm based on Hessian matrix is optimized. The effect of strip center extraction is verified by measuring the V-ribbed parameters.
Key words:structured light; image preprocessing; Steger algorithm
