基于STM32的智能移动拍摄手臂
2019-06-15李明喆刘萧键
李明喆 刘萧键


摘要:智能移动拍摄手臂是一种模仿人的手和臂设计的一种智能装置,该装置通过摄像头将获取的图像数据经处理传输给单片机后,经过无线传输,图像数据显示在移动终端。本文主要叙述了智能移动拍摄手臂的总体设计以及硬件和软件设计与实现。
关键词:智能手臂;图像传输;无线控制
中图分类号:TP242 文献标识码:A 文章编号:1007-9416(2019)03-0014-02
0 引言
智能移动拍摄手臂是以STM32为核心,以舵机、电机、摄像头、WiFi模块为外部固件,使用下半部分为履带小车和上半部分为智能拍摄手臂作为基本构架,完成对作业现场的摄像和作业。控制模块主要控制小车履带的运动和舵机的角度变换。此设计通过WiFi通信模块传输数据,接收来自手机的命令信号,分析控制命令。控制小车向控制方向行进、躲避障碍物,将摄像头返回的图像信息实时传输至移动终端显示,通过控制端进行监控和操作。它可以帮助人类完成因灵活性等制约因素而很难完成的工作,例如自然灾害现场摄像等工作。智能移动拍摄手臂可通过移动终端系统改变软件参数实现其前、后、左、右移动以及舵机移动等功能[1]。本文主要从系统工作原理和硬件电路中主控芯片、摄像头和无线通信模块等方面,来分析基于STM32的智能移动拍摄手臂的设计与实现。
1 系统总体设计
1.1 系统硬件组成
本设计由STM32单片机驱动模块、Android移动终端系统模块、图像采集模块和WiFi通信模块四大模块组成。其中,STM32单片机驱动模块由STM32控制板、电机、舵机等组成;图像采集模块的任务由摄像头完成;移动终端中载有软件可以对接收图像进行处理并发送命令使小车履带及舵机运动;中间数据传输通过WiFi通信模块实现。
1.2 系统工作原理
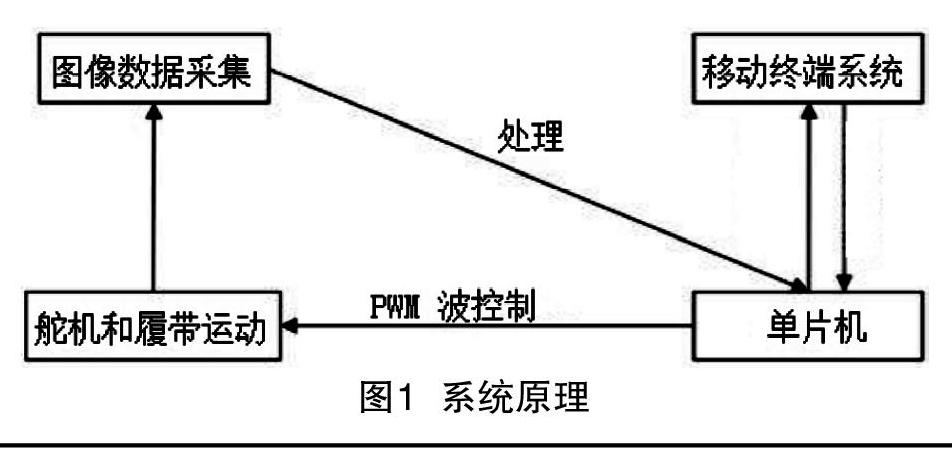
智能移动拍摄手臂使用摄像头进行图像数据采集,返回的图像信息经单片机模块后使用WiFi通信模块传输至移动终端系统处理显示;控制者根据返回数据判断并控制车底盘模块;控制数据被传输至驱动模块后,单片机输出PWM波控制直流电机进而控制舵机的角度变换及履带的运动,实现智能拍摄手臂的运动。系统原理图如图1所示。
2 硬件的设计与实现
2.1 硬件电路设计
驱动模块中采用STM32为主控芯片,控制直流电机进而控制由舵机组成的机械臂和履带电机;数据采集模块使用摄像头来完成;无线收发模块使用WiFi通信模块;移动终端系统采用移动手机上APP实现。系统模式图如图2所示。
2.2 硬件实现
(1)主控芯片。本设备的主控芯片选用STM32F103RBT6,有三种低功耗模式,分别是睡眠模式、停止模式和待机模式,具有容量大、芯片资源丰富、数据处理快等特点,便与实现传送图像数据等多种功能,且价格低廉,有利于节省成本。(2)电机模块。直流电机有很好的调速性能,安全性好、使用寿命长并且噪声低。电机驱动模块使用的直流电机驱动芯片为L298P,可以使小车有足够的驱动力。本设计中主控模块可根据接收到的来自移动终端系统的参数调整输出PWM波,控制直流电机运行进而控制履带的运动,实现智能拍摄手臂的运动。(3)摄像头模块。摄像头模块作为机器视觉领域的核心部件,被广泛地应用在安防、探险以及各类检测等场合。摄像头选用的是OV2640模块,该传感器支持输出最大为二百万像素的图像,还可以对采集得的图像进行补偿,还支持一些基础处理方式。传感器输出图像数据的帧率可调(十五至六十帧)。每一个像素点储存16位的数据来表示颜色,若想要分辨周围的环境确切值,也可以通过读取像素点的数据来确定。(4)WiFi通信模塊。电源连接稳压模块使工作电压为5V的无线通信模块能够正常运行,本设计中使用了体积较小的路由器作为WiFi模块,可按自己的设计要求进行配置,使得移动终端连接至智能移动拍摄手臂更加方便,进行数据的传输[2]。
3 软件设计与实现
软件系统的设计主要分为控制部分和移动终端APP两个部分。软件设计如图3所示。
控制部分程序主要是由摄像头进行图像数据采集和控制数据被传输至驱动模块组成。摄像头返回的图像信息实时通过WiFi通信模块传输至移动终端系统处理显示,单片机输出PWM波对机械臂和电机模块进行控制。移动终端的APP基于Android操作系统,使用Java语言设计。移动终端系统通过无线传输使控制协议将参数发送到WiFi模块上,移动终端在同一WLAN范围内通过访问设置的固定IP地址使之接收到图像信息。使用陀螺仪作为信号传感器。陀螺仪其转动角速度方向与外力矩作用方向互相垂直。通过程序控制移动器械手臂中舵机角度变换等操作,通过摄像头将实时数据返回移动终端[3]。
4 结语
本文简单地分析了硬件和软件的设计思路,完成了智能移动拍摄手臂的设计。本设计可满足我们的返回图像信息、移动等作业要求。拍摄手臂通过摄像头将获取的图像数据经处理传输给单片机后,无线传输,采集到的图像数据显示在移动终端,通过移动终端的控制,实现其运动和舵机的角度变换,达到设计要求。
参考文献
[1] 陈淑艳,陈文家.履带式移动机器人研究综述[J].机电工程,2007,24(12):109-112.
[2] 梁锋,王志良,解仑,等.多舵机控制在类人机器人上的应用[J].微计算机信息,2008,24(2):242-243.
[3] 廖义奎.Cortex-M3之STM32嵌入式设计[M].中国电力出版社,2012.
Smart Mobile Shooting Arm Based on STM32
LI Ming-zhe, LIU Xiao-jian
(Northwest University for Nationalities , Lanzhou Gansu 730000)
Abstract:Intelligent mobile shooting arm is an intelligent device designed to imitate the human hand and arm, the device transmits the acquired image data to the single chip computer through the camera, and then transmits it through wireless communication, the image data is displayed on the mobile terminal. This paper mainly describes the overall design of intelligent mobile shooting arm and the design and implementation of hardware and software.
Key words:intelligent arm; image transmission; wireless control
