基于单片机的平衡小车设计
2019-06-15艾昌雄吴熊俊
艾昌雄 吴熊俊 侯 群
江汉大学 湖北 武汉 430000
1 平衡小车总体设计
本文设计的基于单片机的平衡小车采用卷积神经网络作为网络架构,卷积神经网络是一种常见的深度学习架构,是一种多层结构的深度神经网络。在基于单片机的平衡小车设计中,采用STM32F103C8T6单片机作为主控制器,需要采集和处理的外部信息主要包括平衡小车的速度、当前姿态信息、赛道信息等。在方向控制中,采用OV7620 CMOS数字摄像头采集赛道信息,将信息输入训练好的基于卷积神经网络的赛道类型识别算法中,识别出当前的赛道元素类型,并辅助赛道中心线提取算法计算赛道中心线位置,根据识别出的赛道单元类型和中心线位置控制平衡小车前进方向[1]。
2 平衡小车硬件设计
2.1 单片机模块 本文所选用的主控制器为STM32F103C8T6单片机。STM32F103C8T6单片机是由意法半导体公司生产的,基于ARM Cortex-m3处理器为核心的微控制器,如图1即为STM32F103C8T6单片机电路图。
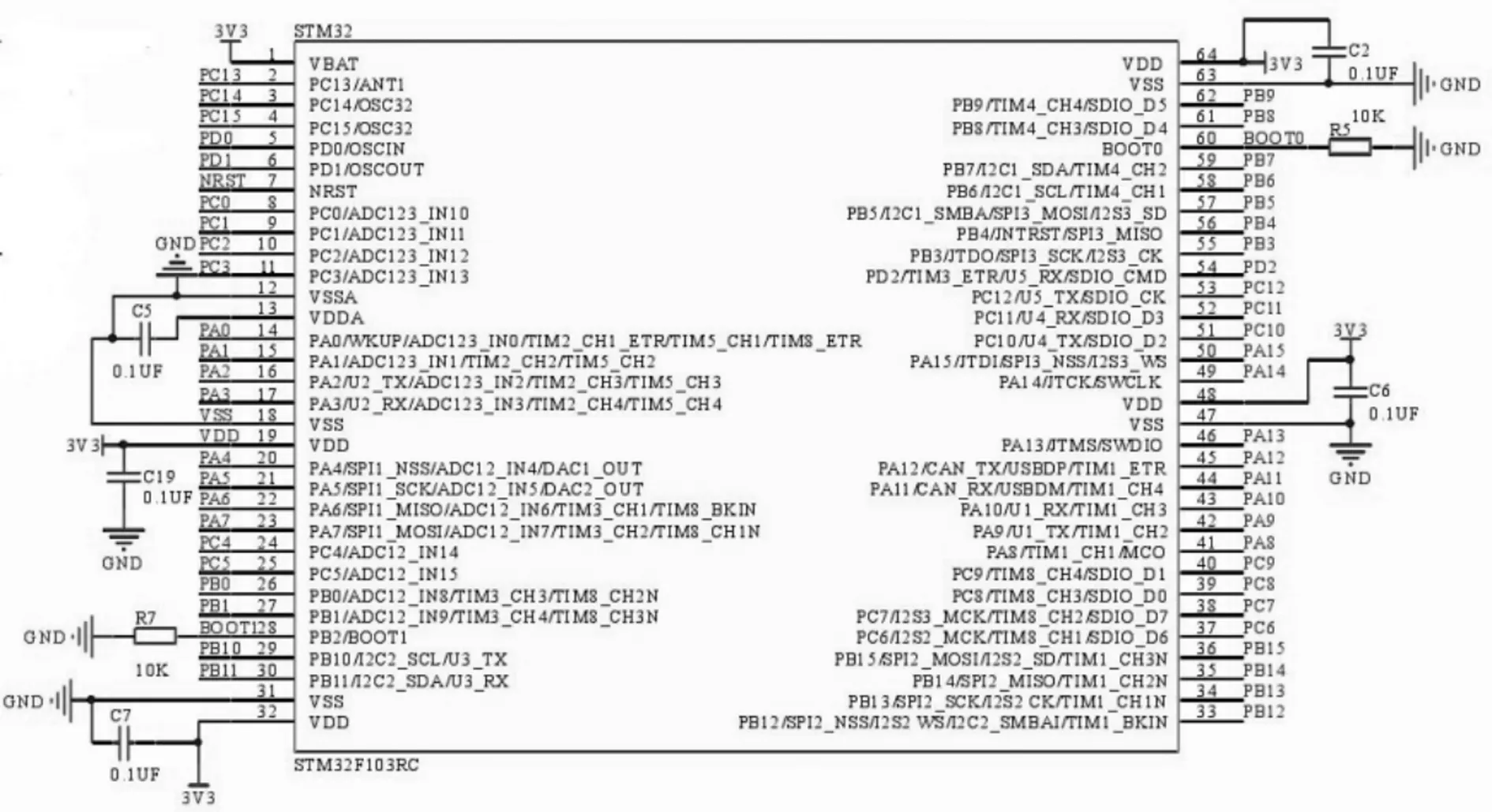
图1 STM32F103C8T6单片机电路
2.2 电源模块 本设计采用传统的12V锂电池供电,位置紧贴于电机之上以降低重心。降压模块采用的是常见的降稳压器,分别为LM2596T(12V降5V)和AMS1117-3.3(5V降3.3V)两个型号的芯片。其输出端口分别对应连接各模块电路中的VCC端口,整个系统GND共地。
2.3 电机模块 本文选用带编码器的直流电动机控制平衡小车。TB6612FNG是东芝半导体公司生产的直流电机驱动器,其外围电路简单,不需要额外的散热片,PWM支持频率高达100k Hz,完全可以满足要求。因此,本文选用TB6612FNG作为电机驱动器,其中AINl/AIN2、B01/B02、PWMA/PWMB为控制信号输入端子,A01/A02、B01/B02为控制信号输出端子,可实现两个电机的同时控制。
2.4 通信模块 本文采用无线蓝牙通信方式实现平衡小车与上位机的通信,通过STM32F103C8T6单片机串口连接蓝牙模块,将单片机计算出的平衡小车姿态数据发送到上位机实时读取。蓝牙模块电路主要通过引脚UART-TX和UART-RX与单片机连接。
2.5 姿态检测模块 本文采用传感器MPU6050检测平衡小车的角加速度和倾角。其中,MPU6050与STM32的通讯方式为IIC通信。该模块电路有四个接口,VCC、GND、SDA、SCL,将SDA和SCL与STM32相连,通过上述的MPU6050的通讯协议,STM32变可实现对MPU6050数据的读取。
2.6 速度采集模块 平衡小车的实时速度采集对精确控制速度起着关键作用。在本设计中,使用增量式编码器来测量速度。当车轮旋转时,驱动编码器旋转。通过对编码器在固定周期内输出的脉冲数进行计数,可以测量实时速度。由于编码器电源为5V,为防止主控制器损坏,外部计数器采用74LV4040A。当Q1引脚为低功率电平时,计数器开始计数,当Q1高功率电平时,计数器值被清除。
3 平衡小车算法设计与测试
3.1 平衡小车算法设计 本文设计的平衡小车采用卷积神经网络算法,利用大量样本数据对其进行训练,并利用卷积神经网络对赛道元素进行识别,辅助平衡小车跟踪算法,提高跟踪精度。在本设计中,基于LeNet-5网络模型设计了卷积神经网络结构。考虑到实际使用中赛道元素图像相对简单,计算量减少,根据实际设计要求,对LeNet-5网络结构进行简化,设计出适合系统实际情况的网络结构。本文将整个网络结构由LeNet-5的8层结构简化为6层结构,在网络中利用C1-S4层提取特征,S4层输出完成识别和分类功能[2]。
赛道元素样本由平衡小车采集,图像通过文本文件以灰度数据的形式保存到SD卡中,保存的样本用于训练。在PC端,首先构造网络结构,对网络参数进行随机初始化,然后从SD卡中读取样本进行批量训练学习。当网络输出满足误差要求时,训练结束,网络参数保存到本地。网络训练程序流程图见图2。
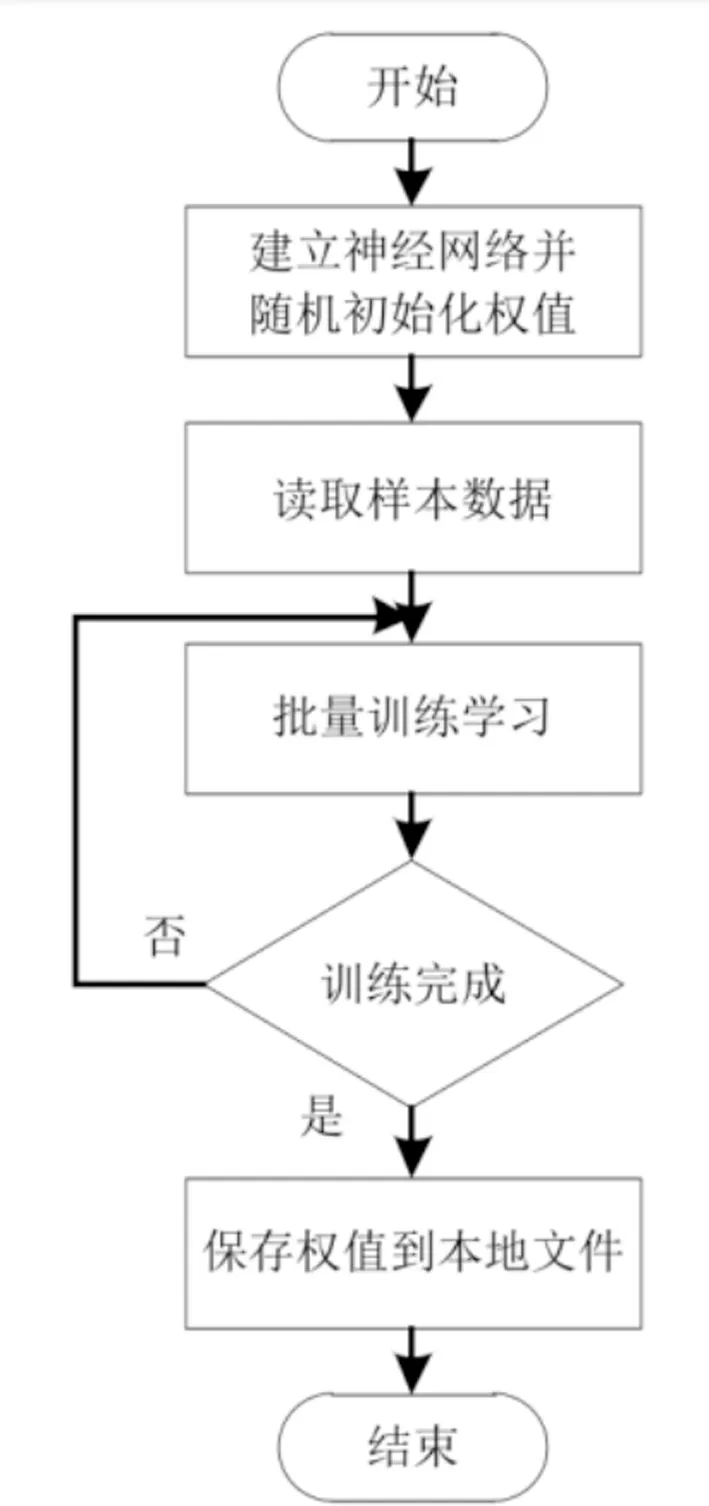
图2 网络训练程序流程图
卷积神经网络主要用于确定赛道单元的类型,辅助平衡小车的转向算法,提高平衡小车寻迹的精度。平衡小车首先构造卷积神经网络,然后读取SD卡中训练好的网络参数并初始化网络。网络框架完成后,可以对采集到的图像进行识别。识别后,得到10位的输出。通过比较十位的输出,选择输出值最大的赛道对应编号。为了提高识别结果的可信度,需要对识别结果进行多次比较[3]。
3.2 平衡小车测试分析 在赛道上测试平衡小车的速度、寻迹精度和平衡稳定性,经过多次参数调试,试验结果表明,平衡小车能调试的最快平均速度为1.70m/s,平衡小车运行时赛道元件无误判,寻迹精度高。在平衡小车通过各赛道元件的试验中,轨迹相对良好,没有失控情况,平衡状态相对稳定。由此可知,由此可以得知本文设计的基于单片机的平衡小车在速度、寻迹精度、平衡稳定性等方面具有良好的性能,值得在实践中投入应用。
