无人系统的互操作架构研究
2019-06-09张永平
张永平
摘 要:互操作性是不同信息系统之间交换信息和使用已交换信息的能力。通过介绍民用领域中的互操作架构和军用领域中的互操作架构,分析现有互操作技术存在的问题,并针对性地提出解决方案,为军民融合型的无人系统通用互操作架构设计提供参考思路。
关键词:互操作性;无人系统;架构设计
中图分类号:TN929.5 文献标志码:A 文章编号:2095-2945(2019)17-0047-03
Abstract: Interoperability is the ability to exchange information and use exchanged information between different information systems. By introducing the interoperation architecture in the civilian field and the interoperation architecture in the military field, the problems existing in the existing interoperation technology are analyzed, and the solutions are put forward. The purpose of this paper is to provide a reference for the design of general interoperation architecture of military-civilian integrated unmanned system.
Keywords: interoperability; unmanned systems; architecture design
借助人工智能技术,无人系统能够自主感知周围环境,并通过信息分发共享形成统一态势,进而分析判断,智能地完成各种任务。然而,现有的无人平台或小型无人系统仍然是烟囱式发展,不同种类、不同型号的无人平台无法实现互联互通互操作。随着信息技术(IT)和操作技术(OT)的深度融合,工业互联网致力于实现不同生产设备之间的互操作性,正在蓬勃发展的智能无人系统,应当也能够汲取工业互联网的发展经验,在推动无人平台/系统信息化、网络化、智能化发展的同时,大力提升无人系统的互操作水平。
1 互操作技术概述
由于不同场景下的互操作性呈现差异化,互操作性还没有一个精确的定义。不管定义如何,互操作性的内涵有两点,一是两个或两个以上系统能够交换信息,二是系统间能有效使用交换信息协同工作[1]。为了确定互操作需求、评估现有系统互操作能力,很多组织或学者提出了互操作等级模型。概念互操作等级模型(LCIM)是广泛使用的一个互操作等级模型[2],将互操作分成六个层级,分别是:L0(无互操作),L1(技术互操作),L2(语法互操作),L3(语义互操作),L4(语用互操作)和L5(概念互操作)。L0表示系统之间没有建立连接,数据独立使用,不具备互操作性。L1表示系统之间建立了物理连接,能够进行比特或字节流的交换。L2表示系统之间使用公共数据协议和公共数据结构进行数据交换。L3表示系统之间借助公共的数据参考模型交换数据的使用语境,使数据具有清晰的语义。L4表示系统之间交换的信息包括数据的使用方法和适用性。L5表示系统之间共享公共参考概念模型相对于真实对象的假设和约束,从而建立真实世界的公共视图。
2 现有互操作架构
2.1 民用领域互操作架构
(1)网络互操作架构
开放系统互联(OSI)模型是应用最为广泛的互操作架构。它将计算机网络抽象为七层,从下至上分别是:物理层,链路层,网络层,传输层,会话层,表示层,应用层,实现了L1技术互操作,L2语法互操作和L3语义互操作。技术互操作由OSI模型的1~4层管理,提供一套基于协议的网络基础设施技术,实现网络交换原始信息的能力。语法互操作由OSI的5~6层处理,提供正在传输的数据类型和格式,实现节点之间交换结构化数据的能力。语义互操作由OSI的第7层应用层实现,使系统能从应用程序的上下文中解释结构化数据的含义。在OSI架构中,技术互操作得到很好地理解和标准化,而语法和语义互操作则依赖于特定行业或特定应用,并进行相应的优化。
(2)工业互联网互操作架构
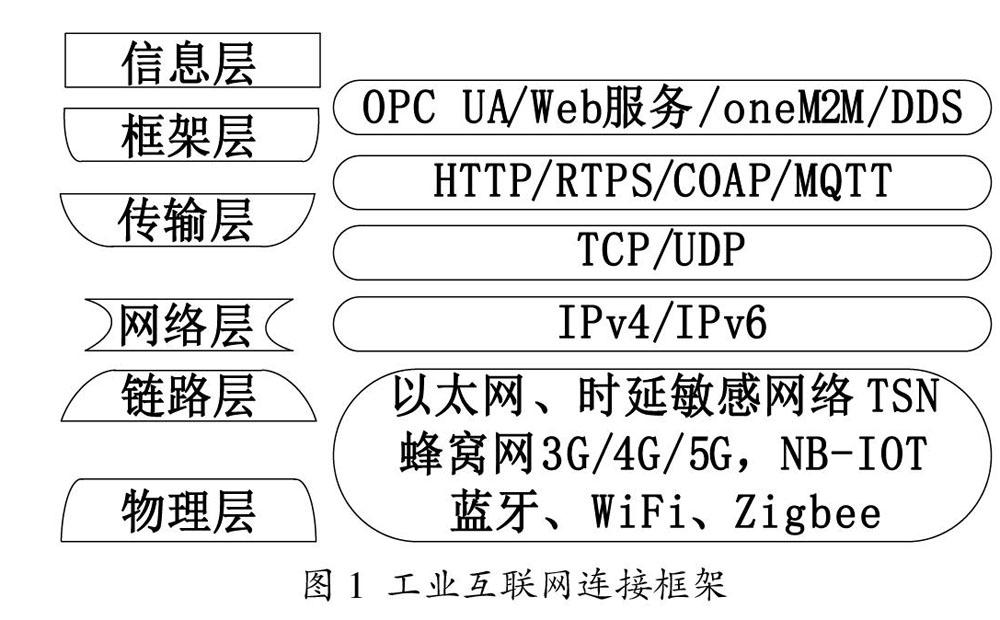
为了促进工业场景的互操作性,工业互联网联盟(IIC)提出了工业互联网连接框架(IICF),如图1所示。该框架将OSI模型的表示层和会话层重新整合为互操作框架层,通过提供必要的机制,以实现数据的结构化和无歧义解析。从该连接框架可以看出,工业互联的技术互操作仍然沿用OSI模型中物理层、链路层、网络层和传输层中的成熟协议,对现有基础设施进行改进,以满足工业控制的实时性和可靠性要求。而语法互操作则将之前的客户端/服务器模式扩展到发布/订阅模式和基于统一资源定位的Web服务模式,允许应用程序以不同的服务质量(QoS)级别来传输状态、事件和流等结构化数据。信息层旨在实现语义互操作,虽然各行业均在建立覆盖尽可能广泛的信息模型,但是目前还没有适用于跨行业的标准化统一语义数据模型。
2.2 军用领域互操作架构
(1)北約无人机控制站互操作标准化接口(STANAG 4586)
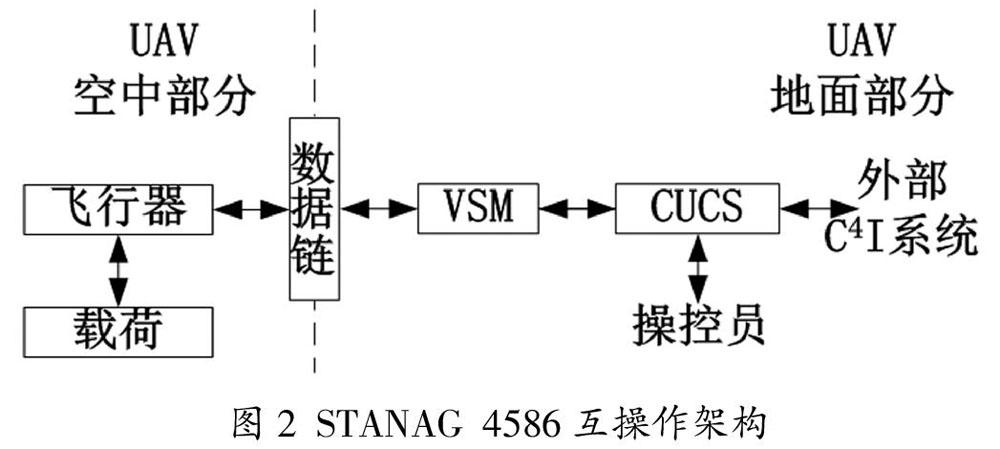
随着无人机技术的发展,无人机大量应用到指挥、控制、通信、计算机和情报系统(C4I)中,STANAG 4586标准被制定用来实现不同地面控制站与不同无人机及其载荷之间的互操作性,其互操作架构如图2所示。STANAG 4586包含了无人机核心部件(CUCS)和飞行器之间的接口、CUCS和外部C4I系统之间的接口,以及CUCS和无人机系统操控员之间的接口,通过对系统信息的资源共享和共同利用来满足任务目标需求,有效提高灵活性和效率[3]。需要指出的是,CUCS仅对飞行器进行非实时和近实时控制,飞行器的实时控制由飞行器专用设备(VSM)来实现。
(2)无人系统联合体系(JAUS)
JAUS最初是美陆军针对无人地面车辆而建立的消息集合和数据协议,后来联合工业界和学术界形成无人地面系统联合体系(JAUGS)。随着无人系统的发展,JAUGS的研究对象扩大到美国防部范围内的所有无人系统,并正式更名为无人系统联合体系JAUS。2004年,美国机动车工程师协会将JAUS纳入到航天航空标准下的无人系统子类标准。自此,JAUS的发展势不可挡,已成为民用领域无人系统互操作的事实标准之一。
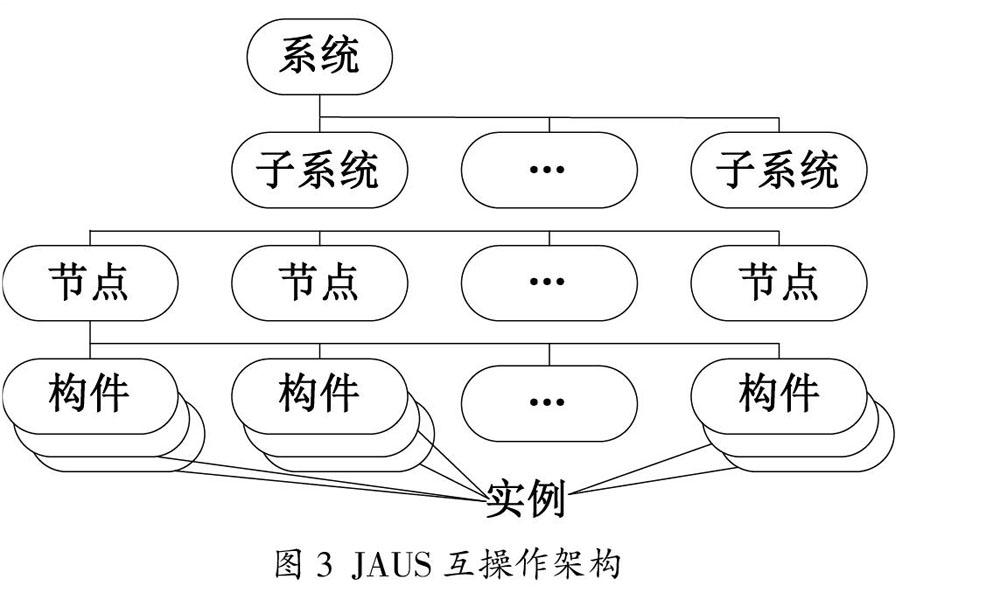
如图3所示,JAUS定义了一种通用的无人系统体系结构,采用分层的方式划分了系统层、子系统层、节点层、构件/实例层、以及服务层。系统层是一系列可互操作的子系统的集合体,子系统层则对应无人系统中的物理实体或操控员控制单元,节点层则是为子系统提供某种能力的软件、硬件模块。构件可看做节点中提供某种服务或多种服务的应用程序,而实例则对应于应用程序的一个实现。JAUS以模块化、松藕合、可扩展的体系结构为基础,以一组与具体应用无关、可重用的构件和服务为支撑,以标准接口消息为交互保证,支持面向作战任务的系统重构和技术集成,从而使遵循JAUS的无人系统之间具有互操作性[4]。
(3)无人系统控制段(UCS)
STANAG 4586将无人系统分为地面部分、空中部分和C4I部分,UCS则在地面部分和空中部分之间增加了无人机控制部分,试图建立一个通用的基础服务体系,使无人机控制模块可以接入任意无人系统中,也可与任意无人系统实现互操作。UCS将软件系统架构分成六个域,空间态势域:提供态势感知信息以指挥控制和保护无人机;外部消息与通信域:管理UCS和外部C4I系统之间的通信接口;任务规划域:产生和监控所有任务规划;初始任务控制域:接收任务命令,并执行该任务;传感器信息域:获取传感器信息,监控信息质量,处理并发送;系统支持域:提供综合后勤保障服务,支持无人机运作。UCS基于模型驱动架构(MDA)的概念,抽象出与实现技术无关的完整描述业务功能的核心平台无关模型(PIM),通过制定针对不同技术的转换规则及辅助工具将PIM转换成与具体实现技术相关的平台(PSM),如图4所示[5]。
3 存在的问题与解决方案
目前开展的互操作研究既缺乏系统的基础理论支撑,又缺乏对互操作性的协调一致理解,因而还存在以下问题:
(1)民用领域的工业互联网采用已有的基础设施和广泛应用的TCP/IP协议栈,已基本实现异构系统的互联互通,并朝着语义互操作阶段快速发展。而军用领域的无人系统互操作仍处在制定数据接口协议的语法互操作阶段。
(2)新兴信息技术的飞速发展驱动着产业的重大变
革,工业互联网的兴起聚焦于信息化共享的数据要服务于工业化,但是,决策控制对数据的实时可信需求反过来推动着信息化技术的发展,目前主要集中于对已有基础设施的改造以提高实时性和可靠性。
(3)智能无人系统的蓬勃兴起促进了人工智能等新兴信息化技术在国民生活领域的广泛应用,数据接口协议恰是实现无人系统互操作性的基础。然而,现有的无人系统互操作协议仍然采用传统互联网的基础设施和协议栈,这将为智能无人系统更高层次的互操作性埋下隐患。
通过以上分析,以下是建议的解决方案:
(1)无论是民用领域还是军用领域,无论是有线网络还是无线网络,互操作的核心是数据共享能力和数据使用能力。数据感知是数据共享的前提,决策控制是数据使用的目的。因此,互操作架构要具有通用性,要能覆盖互操作的各个阶段(等级)。
(2)决策控制是互操作性研究的重要着力点,它将传统的以数据共享为目的的“分组交换网”提升到以数据使用为目标的“控制交换网”。对于“控制交换网”,互操作性不仅要研究基于现有基础设施及现有协议栈的实现途径,还要研究新的基础设施或新的协议栈以应对更高性能的挑战。
(3)智能无人系统区别于传统互联网和工业互联网的重要一点是,无人系统从地面范围扩大到水面、水下、空中、甚至到临近空间,大量的无线连接使得其复杂性远超以有线网络为骨干的互联网。因此,针对智能无人系统应统筹规划,设计全新的“开放系统互操作性模型”。
参考文献:
[1]汤再江,徐享忠,等.指挥信息系统与作战仿真系统互操作研究综述[J].系统仿真学报,2015,27(8).
[2]晉芳华,刘鹏,钱兴华.语义级互操作的关键技术研究[J].舰船电子工程,2016,36(7).
[3]卓琨,黄国策,等.美国无人系统路线图中通信和互操作性发展研究[J].飞航导弹,2015(5).
[4]M.-mMarques,等.两种无人系统体系结构-STANAG 4586和JAUS[C].信息控制自动化国际会议,ICA 2015.
[5]刘泽勋.无人机控制模块的概念与发展[J].飞航导弹,2016(4).
