基于LiDAR数据不同插值算法DEM构建研究
2019-06-07尤号田邢艳秋丁建华
尤号田 邢艳秋 丁建华
摘要:数字高程模型(DEM)是进行多种空间应用的基础,通常由地形三维坐标数据经内插得到,由于受插值算法性能的影响,因此本文对不同插值算法DEM生成结果进行对比研究。本研究以机载激光雷达数据为基础,基于常用插值算法,如:反距离加权插值算法、克里金插值算法、自然邻域插值算法和样条插值算法,生成城区、草地和林地3种不同地物类型DEM插值结果,并对所得插值结果进行对比研究。结果对于城区和草地较平坦区域而言,自然邻域插值算法结果较好,RMSE分别为0.433 m和0.052 m;而对于地形起伏较大的林地而言,样条插值结果较优,RMSE为0.748 m。结果表明,地形平坦区域DEM插值结果优于地形起伏较大区域,且不同插值算法在不同地物类型表现不同。
关键词:数字高程模型,激光雷达数据,插值算法,林地
中图分类号:TP79文獻标识码:A文章编号:1006-8023(2019)03-0020-06
Research on DEM Construction with Different Interpolation
Algorithms Based on LiDAR Data
YOU Haotian1, XING Yanqiu2*, DING Jianhua2
(1.College of Geomatics and Geoinformation, Guilin University of Technology, Guilin 541004;
2.Center for Forest Operations and Environment, Northeast Forestry University, Harbin 150040)
Abstract:Digital elevation model (DEM) is the foundation of many spatial applications and usually obtained by interpolation of terrains three-dimensional coordinates. And the accuracy of DEM is affected by the interpolation algorithm. Therefore, it is necessary to study the performance of different interpolation algorithms. In this paper, the commonly used interpolation methods, namely, inverse distance weighted interpolation, kriging interpolation, natural neighborhood interpolation and spline interpolation, were used to construction DEM based on airborne LiDAR data. And the results of different interpolation methods under urban, grassland and forest land use types were compared. It was showed that the results of natural neighborhood interpolation algorithm were better and RMSEs were 0.433 m and 0.052 m for the flat area of urban and grassland, respectively. While for the forest land with large terrain fluctuation, the result of spline interpolation method was better and the RMSE was 0.748 m. It was concluded that the results of DEM interpolation in flat terrain area were better than those in large terrain fluctuation area, and different interpolation algorithms had different performances under different terrain types.
Keywords:Digital elevation model; LiDAR data; interpolation algorithms; forest land
0引言
地球表面在调节全球气候、大气、水文以及生态过程方面均起着重要作用,对地球表面特征的准确描述能够帮助人类更好的理解上述过程[1],而地球表面特征最简单有效的量化方法之一是应用数字高程模型(Digital Elevation Model,DEM)[2]。DEM是用于存储地形信息的通用数据结构,通常由离散数据点经内插得到,并通过分析获得区域的地形特征。
传统DEM创建方法需要进行野外实地测量,因而导致DEM生成成本较高且耗时费力[3-4]。随着技术的发展,摄影测量已成为生成DEM的主要方法之一[5]。近年来,光探测测距(Light Detection and Ranging,LiDAR)系统凭借其能高精度、实时和大面积高效地采集三维信息的优势,现已成功用于数字城市、海岸监测和森林资源清查等领域[6-9],并发展成为地形数据采集的有效方法[10]。在激光雷达技术中,通过测量发射脉冲返回激光雷达传感器所需的时间来测量地面物体与激光雷达传感器之间的距离。与传统的测绘系统,包括摄影测量系统相比,LiDAR技术为高分辨率大面积的测绘提供了一种快速、准确的替代方案,并逐渐被用作生成DEM的主要技术[11]。
虽然机载LiDAR数据能够为DEM构建提供高精度的数据来源,但基于机载LiDAR数据的DEM高精度构建还受其他因素的影响[12],如:插值算法,即在相同数据源上应用不同的插值方法可能导致DEM构建精度不同,因此急需对不同插值算法的插值结果进行对比研究以获得最优插值算法,最大程度提高DEM构建精度。
基于此,本研究以机载LiDAR数据为基础,通过对LiDAR数据进行处理,得地面点和非地面点,之后在多种地物类型下应用不同插值算法生成DEM数据,通过对比研究得出不同地物类型的最优插值算法,以期为大区域DEM构建提供技术与方法指导。
1材料与方法
1.1激光雷达数据简介与处理
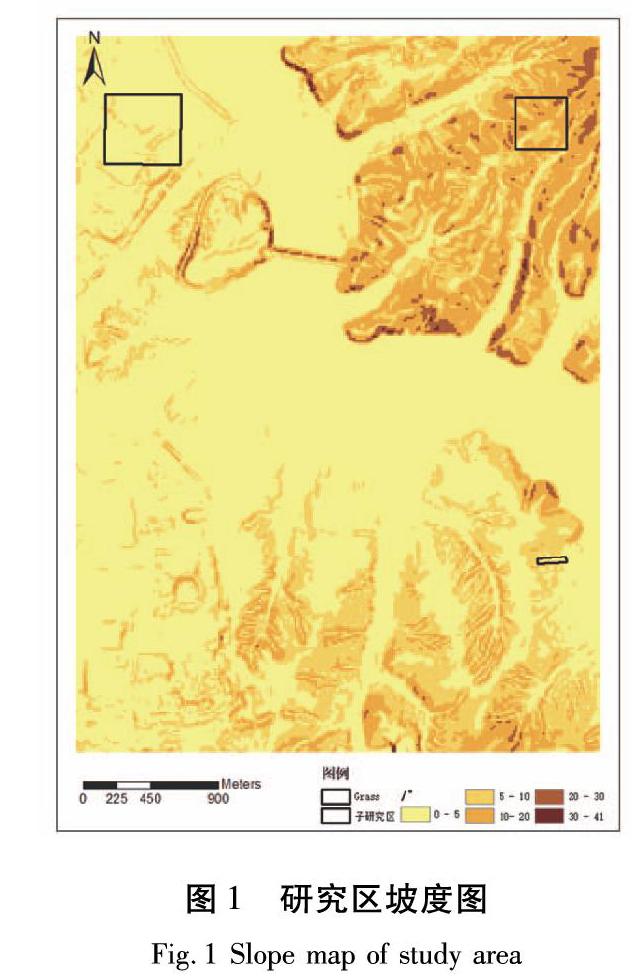
本研究所选地区位于吉林长春市,包括建筑物、道路、水域、林地和草地等多种地物类型,由平地和坡地等地形组成(图1)。
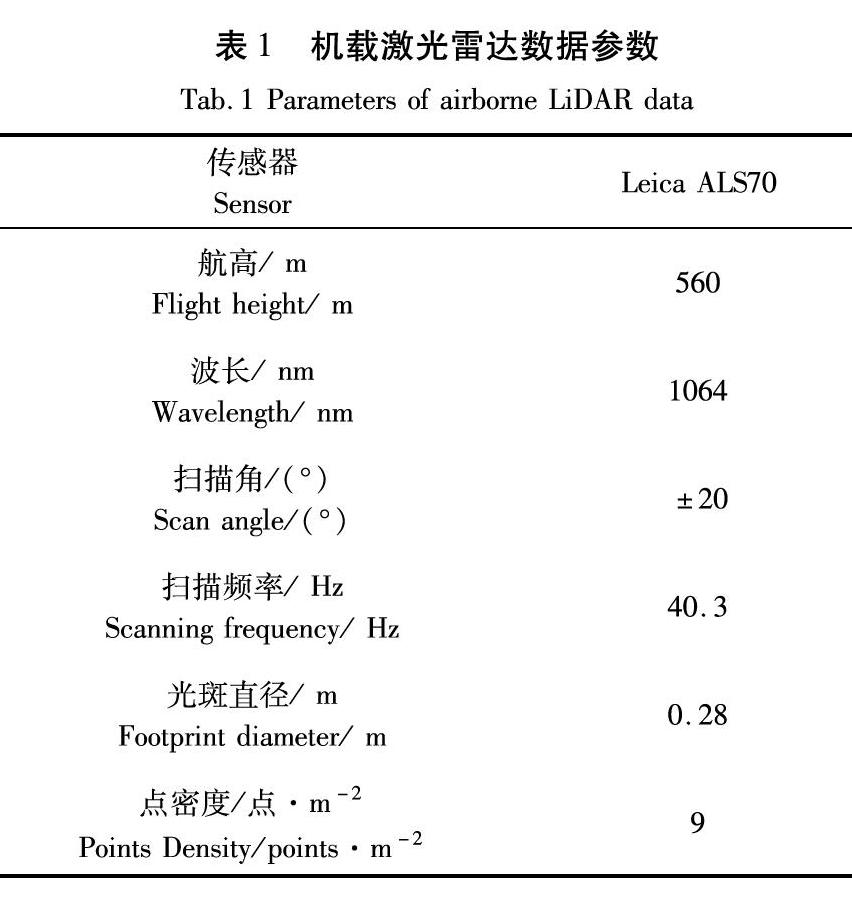
研究所用激光雷达数据获取于2012年5月,由Leica ALS70激光雷达传感器获取,飞行参数具体见表1。
首先,利用Terrasoild软件对原始激光雷达数据进行预处理,之后利用不规则三角网算法对预处理后的激光雷达数据进行滤波处理,得到地面点和非地面点,接着利用反距离加权插值算法对地面点进行插值以生成研究区参考DEM数据。为了与参考DEM形成对比来评价不同插值算法生成DEM精度,本研究将得到地面点云数据按每第50个地面点提取1个地面点(only every 50th point)进行数据抽取操作,之后应用不同插值算法生成DEM数据,且两类DEM数据像元大小均为1 m。
1.2插值算法
为了对不同插值结果进行对比,本研究选用了4种常用的插值算法,如:反距离加权插值算法、克里金插值算法、自然邻域插值算法和样条插值算法,具体描述如下。
(1)反距离加权插值算法。反距离加权插值算法是一种基于几何模型逼近的插值方法,主要是基于反距离加权算法利用其邻域范围内所有离散点的值对待插值高程点进行插值。因而,待插值点的高程值由其周圍一定范围内所有的点的高程值的加权值求得,权值由附近离散的点到待插值之间的距离来确定[13]。由于用离散点到待插值点的距离就能够把该算法的权值确定下来,所以这种插值算法具有很高的效率,计算量也比较小。本研究所用反距离加权插值算法参数设置具体为:输出像元大小为1 m,可变搜索半径,点数量为12。
(2)克里金插值算法。克里金插值算法是一种基于统计随机场模型的逼近算法[14]。它的主要运作原理是利用一定范围内的数据点的高程值赋上权值之后累加到待插值点的高程值,可以基于估计点的权值将克里金插值算法分为普通克里金和泛克里金等[15]。这种算法以周围离散点的属性和空间分布特征为基础,权值越小,距离插值点的距离就越大,权值越大,距离插值点的距离就越小,它们之间成反比的关系,离散点的分布不匀带来的误差就能够得到消除。本研究采用普通克里金插值算法,变异函数模型为球面模型,输出像元大小为1 m,可变搜索半径,点数量为12。
(3)自然邻域插值算法。自然邻域插值算法可以找到距离查询点最近的输入样本子集,并基于样本面积大小按比例进行权重插值[16]。该插值方法在进行对数据插值的时候不会对地形地貌的走势做出改变。局部性是自然邻域插值算法的基本属性,在做数据内插处理时就用了所要查询的点相邻的样本子集,并且能够确保样本范围包含插值高度。本研究所用自然邻域插值算法输出像元大小也为1 m。
(4)样条插值算法。样条插值作为一种插值方法,通过最小化整个表面曲率的数学函数来计值,从而产生一个平滑的表面,并且保证该表面通过该输入点[17]。最小曲率样条插值的基本形式在进行数据插值处理的时候应当满足以下的两个基本条件:①数据点必须要准确的穿插过插值的表面;②必须是最小的插值表面曲率。本研究所用样条插值算法参数设置具体为:输出像元大小为1 m,样条类型为规则样条函数,权重为0.1,点数量为12。
1.3精度评价
本研究通过计算插值DEM与参考DEM对应像元高程的均方根误差(RMSE)以评价不同插值算法生成DEM结果的精度,RMSE的具体计算过程为:
RMSE=(zdem-zref)2n。(1)
式中:Zdem是不同插值算法生成DEM像元的高程值;Zref是对应像元的高程值;n是DEM的像元数量。
2结果与分析
为了验证不同插值算法DEM生成精度以及不同插值算法地物类型的适用性,本研究分别选择研究区内的城区、草地和林地3种地物类型对不同插值算法结果进行对比研究。
2.1城区不同插值算法DEM插值结果
不同插值算法城区DEM插值结果如图2所示,
RMSE计算结果见表2。通过对图2和表2中的结果进行分析可知,在4种插值算法中最优插值算法是自然邻域插值(图2(e)),RMSE为0.433 m;其次是反距离加权插值(图2(c)),RMSE为0.516 m;克里金插值结果最差(图2(d)),RMSE为0.660 m。
2.2草地不同插值算法DEM插值结果
不同插值算法草地DEM插值结果如图3所示,RMSE计算结果见表3。通过对图3和表3结果进行分析可知,草地类型插值结果与城区类型插值结果类似,即在4种插值算法中最优插值算法是自然邻域插值(图3(e)所示),RMSE为0.052 m;其次是克里金插值(图3(c)所示),RMSE为0.053 m;反距离加权插值结果最差(图3(d)),RMSE为0.067 m。
2.3林地不同插值算法DEM插值结果
不同插值算法林地DEM插值结果如图4所示,RMSE计算结果见表4。通过对图4和表4结果进行分析可知,林地类型插值结果与城区和草地类型结果差异较大,主要表现在4种插值算法中最优插值算法是样条插值(图4(f)),RMSE为0.748 m;其次是自然邻域插值(图4(e)),RMSE为0.974 m;克里金插值结果最差(图4(d)),RMSE为2.227 m。
对城区、草地和林地3种地物类型所得结果进行对比分析,可知草地类型插值结果最优,城区次之,林地插值结果误差最大,这主要是因为草地类型地形平坦,不同区域坡度、高程差相对较小;而城区虽然地形也相对较平坦,但仍存在地形高程变化较大的区域,因而插值所得误差比草地类型大;对于插值误差最大的林区,则主要因为森林多生长于山地,不同区域高程、坡度相差均较大(图1),而且由于森林冠层遮挡,导致打到地面的LiDAR数据相对较少,因而在点云密度较低情况下插值生成林区DEM时误差较大,为了获取高精度DEM数据,在未来研究中应增加林区LiDAR数据密度。
3结论
为了获得最优插值算法,本研究以机载LiDAR数据为基础,通过对点云数据进行滤波、分类处理,得地面点和非地面点数据,之后利用不同的插值算法生成DEM,并对城区、草地和森林3种地物类型不同插值算法DEM数据进行对比研究,最终得不同地物类型下最优插值结果。
(1)对不同地物类型而言,城区、草地插值DEM精度高于林地。对于城区DEM而言,最大RMSE为0.660 m,最小RMSE为0.433 m;对于草地而言,最大RMSE为0.067 m,最小RMSE为0.052 m;而对于林地而言,最大RMSE为2.227 m,最小RMSE为0.748 m。相较而言,林地的最小RMSE(0.748 m)均比城区和草地的最大RMSE(分别为0.660 m和0.067 m)都大。
(2)不同插值算法适用的地物类型不同。对于城区和草地类型而言,最优插值算法是自然邻域插值,RMSE分别为0.433 m和0.052 m;对于林地而言,最优插值算法是样条插值,RMSE为0.748 m。
综上所述,在城区、草地和林地3种地物类型4种不同插值算法中,最优插值算法为自然邻域插值算法,但本研究仅选择了3种不同的地物类型,所得结论在其他地物类型下可能不具适用性,因而在未来的研究中应加入更复杂的地形条件、更多的地物类型以提高結论的适用性。
【参考文献】
[1]HUTCHINSON M, GALLANT J C. Digital elevation models and representation of terrain shape[C]. Terrain Analysis: Principles and Applications, 2000.
[2]WILSON J P. Digital terrain modeling[J]. Geomorphology, 2012, 137(1):107-121.
[3]GONG J Y, LI Z L, ZHU Q, et al. Effects of various factors on the accuracy of DEMs: an intensive experimental investigation [J]. Photogrammetric Engineering & Remote Sensing, 2000, 66(9): 1113-1118.
[4]ARUN P V. A comparative analysis of different DEM interpolation methods[J]. Geodezijos Darbai, 2013, 39(4): 171-177.
[5]杜敏,李明会,颜萍,等.全数字摄影测量DEM在生产中的质量控制[J].测绘与空间地理信息, 2009, 32(4):222-224.
DU M, LI M H, YAN P, et al. Quality control of full digital photographic surveying on DEM production[J]. Geomatics & Spatial Information Technology, 2009, 32(4) :222-224.
[6]高敏,韩聪.基于机载激光雷达技术的城市三维数据建设[J].测绘与空间地理信息,2014,37(11):135-136.
GAO M, HAN C. Construction of 3D data in urban area based on airborne LiDAR[J]. Geomatics & Spatial Information Technology, 2014, 37(11): 135-136.
[7]张靓,欧阳永忠,滕惠忠.航测与机载LiDAR技术在海岸带遥感中的应用[J].海洋测绘,2017,37(6):62-65.
ZHANG L, OUYANG Y Z, TENG H Z. Applications of aerial photogrammetry and airborne LiDAR in remote sensing monitoring of coastal zones[J]. Hydrographic Surveying and Charting, 2017, 37(6): 62-65.
[8]尤号田,邢艳秋,王萌,等.小光斑激光雷达数据估测森林生物量研究进展[J].森林工程,2014,30(3):39-42.
YOU H T, XING Y Q, WANG M, et al. The progress on estimating forest biomass using small footprint LiDAR data[J]. Forest Engineering, 2014, 30(3): 39-42.
[9]邢艳秋,姚松涛,李梦颖,等.基于机载全波形LiDAR数据的森林地上生物量估测算法研究[J].森林工程,2017,33(4):21-26.
XING Y Q, YAO S T, LI M Y, et al. Estimation algorithm of forest aboveground biomass based on airborne full waveform LiDAR data[J]. Forest Engineering, 2017, 33(4): 21-26.
[10]李鹏程,王慧,刘志青,等.一种从机载LiDAR点云数据获取DEM的方法[J].测绘通报,2012(5):59-62.
LI P C, WANG H, LIU Z Q, et al. A method of deriving DEM from airborne LiDAR points cloud data[J]. Bulletin of Surveying and Mapping, 2012(5): 59-62.
[11]HILL J. M, GRAHAM L. A, HENRY R. J, et al. Wide-area topographic mapping and application using airborne light detection and ranging (LIDAR) technology[J]. Photogrammetric Engineering & Remote Sensing, 2000, 66(8): 908-914.
[12]HODGSON M E, BRESNAHAN P. Accuracy of airborne LIDAR-derived elevation: empirical assessment and error budget[J]. Photogrammetric Engineering and Remote Sensing, 2004, 70(3): 331-339.
[13]靳克强,龚志辉,王勃,等.机载激光雷达数据提取DEM的关键技术分析[J].测绘工程,2010,19(6):39-42.
JIN K Q, GONG Z H, WANG B, et al. Key step analysis of extraction DEM based on LiDAR data[J]. Engineering of Surveying and Mapping, 2010, 19(6): 39-42.
[14]靳克强.机载激光雷达数据滤波生成DEM技术研究[D].郑州:解放军信息工程大学,2011.
JIN K Q. A study on data filtering and DEM extraction of airborne LiDAR point clouds[D]. Zhengzhou: PLA Information Engineering University, 2011.
[15]李俊晓,李朝奎,殷智慧.基于ArcGIS的克里金插值方法及其应用[J].测绘通报,2013,59(9):87-90.
LI J X, LI C K, YIN Z H. ArcGIS based Kriging interpolation method and its application [J]. Bulletin of Surveying and Mapping, 2013,59(9): 87-90.
[16]肖城龍.基于ArcGIS的空间数据插值方法的研究与实验[J].城市勘测,2017,32(6):71-73.
XIAO C L. The study and experiment of spatial data interpolation based on ArcGIS[J]. Urban Geotechnical Investigation & Surveying, 2017,32(6): 71-73.
[17]阎洪.气候时空数据的样条插值与应用[J].地理与地理信息科学,2003,19(5):27-31.
YAN H. The influences factors on field spectrometry[J]. Geography and Geo-Information Science, 2003, 19(5): 27-31.
