基于Calypso电磁实时跟踪系统的4D剂量验证
2019-06-06蔡春雅戴振晖张白霖朱琳招什武杨耕朱远湖李飞王学涛
蔡春雅,戴振晖,张白霖,朱琳,招什武,杨耕,朱远湖,李飞,王学涛
广州中医药大学第二附属医院,广东广州510006
前言
由呼吸运动导致的肿瘤运动仍是当今放射治疗的一大难点,特别是在基于MLC 的调强放疗中可导致最高47.8%的靶区剂量偏差[1]。近年来,放射治疗方案渐趋于以立体定向放射治疗(Stereotactic Body Radiotherapy,SBRT)为主的大剂量、大分割治疗,对靶区剂量的精确度要求更高。呼吸门控、4D-CT等技术可在一定程度上预测肿瘤运动范围,但由于缺乏可靠的肿瘤实时运动信息,无法保证靶区治疗精度。Varian Edge 直线加速器配置的Calypso 4D 电磁跟踪系统,可通过对植入到病人体内或者放置在体表的Beacon 转发器反馈的电磁信号进行检测,在三维空间内实现对靶区的实时连续跟踪,精度达亚毫米级[2-4]。本研究基于Calypso电磁跟踪技术,利用三维半导体探测阵列Delta4系统与自制呼吸运动平台,探讨对运动靶区的实时4D剂量验证。
1 材料与方法
1.1 仪器设备
1.1.1 Delta 4三维剂量验证系统 圆柱形模体中嵌有两个正交的二维半导体探测器矩阵,共有1 069个P型半导体探测器,探测面积20 cm×20 cm,中心6 cm×6 cm范围内探头间隔为5 mm,周围探头间隔为1 cm,各向同性,可完成任意角度的测量,分辨率0.007 8 cm2,剂量响应最小为1 mGy。在实际测量前,Delta4需按步骤依次进行参考点测量、相对剂量校准、绝对剂量校准和方向性校准,其中参考点的剂量测量使用0.6 cc指形电离室插入Delta4校准模体内进行。
1.1.2 Calypso电磁定位跟踪系统 由Beacon转发器、控制台、电磁阵列、光学定位系统和监测工作站5 个部分组成。Beacon 转发器分为植入式与表面式,植入式转发器将3个转发器植入到靶区内,对于离体表较近的肿瘤可在体表放置转发器,以精确反馈肿瘤位置。当Calypso 系统检测到运动靶区超出预先设定的运动阈值,立即触发脉冲开关电路控制加速器停止出束,以保证治疗过程中肿瘤靶区的位置自始至终处于高剂量区域,实现较小偏差的精确照射。
1.1.3 可编程呼吸运动平台 自主研发的运动平台最大运动幅度40 mm,最大载重20 kg,可通过程序控制前后(SI)方向运动频率和运动幅度实现周期往返运动。
1.2 放疗计划
在Eclipse计划系统上,基于Delta4的CT图像分别创建一个6 MV X线,5 cm×5 cm方野计划;10 cm×10 cm方野计划;直径10 cm圆形野计划。计算模体中的剂量,把三维剂量文件通过DICOM RT 传输到Delta4系统。
从2018年在广东省中医院接受调强放疗的胸腹部肿瘤患者中随机挑选接受静态调强(Intensity Modulated Radiation Therapy, IMRT)计划患者5 例,接受旋转调强(Volumetric Modulated Arc Therapy,VMAT)计划患者5 例,将所有计划移植到Delta4 模体,分别重新计算模体中的剂量,导出RTDose 剂量分布文件。
1.3 验证方法
1.3.1 实验设置 如图1所示,运动平台置于Edge 直线加速器治疗床上并搭载Delta4模体,模体表面十字线与机房激光十字线对齐。Delta4在验证前预热20 min,并完成一个盒式射野计划测量。Calypso 阵列置于Delta4 上方,3 个植入式Beacon 转发器固定在Delta4圆柱形模体表面(图2),根据Calypso 系统跟踪范围要求,3 个转发器相对于等中心坐标分别为A(-6,-1.5, 5)、B(-6, 1.5, 5)和C(6.0, 0.0, 5),单位为cm。电磁转发器持续输出三维空间实时位置信息,采集频率为25 Hz[5-6]。在计划系统的CT图像上确定3个转发器(Apex、Left、Right)位置并将转发器坐标和计划等中心坐标输入Calypso工作站。
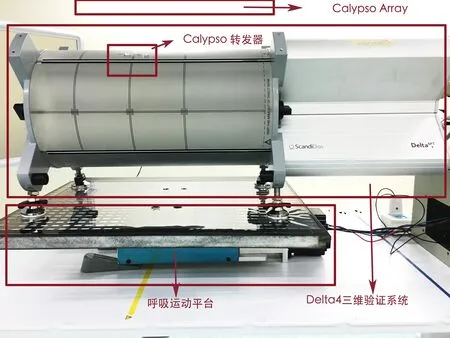
图1 实验设置Fig.1 Experimental setup
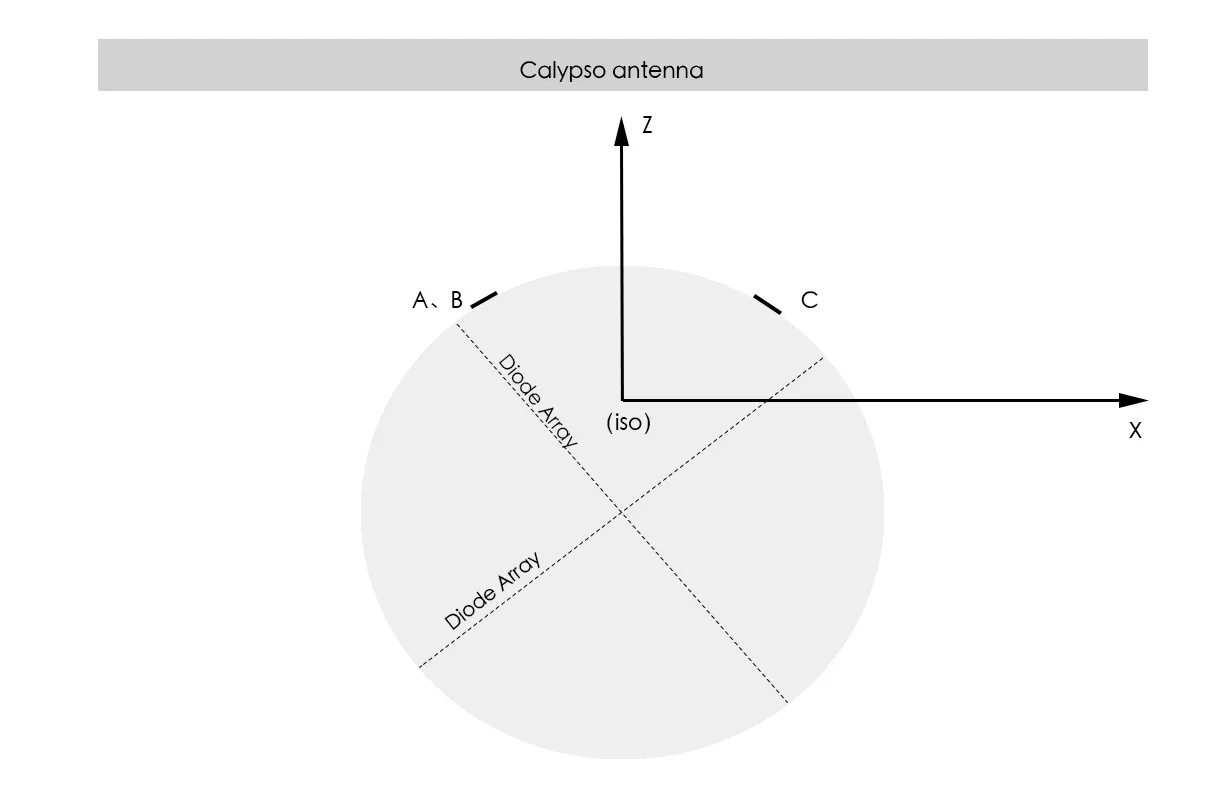
图2 Calypso Beacon与Delta4模体相对位置Fig.2 Relative position of Calypso Beacon and Delta4 phantom
1.3.2 剂量测量 将Delta4 模体置于运动平台上,运动平台静止不动,在模体上分别执行放疗计划并保存测量结果;运动平台搭载Delta4 模体作SI 方向上周期(T)=5 s,振幅(A)=±10 mm 的周期往返运动,分别执行放疗计划并保存测量结果;运动平台搭载Delta4 模体做SI方向上T=5 s,A=±10 mm的周期往返运动,使用Calypso 跟踪模体运动,设置运动阈值分别为±2、±3、±5 mm,分别执行放疗计划并保存测量结果。
1.3.3 数据分析 通过ScandiDos 软件对Delta4 实际测量剂量分布与治疗计划系统计算的剂量分布进行对比,按照一般临床要求,采用3%/3 mm 的γ 判定标准,通过的测量点数占有效测量点数百分比≥90.0%表示剂量验证通过。静态、动态无跟踪、动态跟踪不同阈值下γ 通过率两组间比较采用配对t 检验,P<0.05为差异有统计学意义。
2 结果
2.1 实测剂量γ通过率
静态、动态下Calypso 运动阈值为±2、±3、±5 mm以及动态无跟踪时γ 通过率见表1。与静态下平均γ通过率比较,使用Calypso动态运动阈值为±2、±3 mm时γ 通过率差异无统计学意义(P>0.05),Calypso 动态运动阈值为±5 mm 与动态无跟踪时比较γ 通过率差异具有统计学差异(P<0.05)。Calypso 动态跟踪下使用±2、±3 mm运动阈值时γ通过率平均值≥90.0%。

表1 总γ通过率比较(%)Tab.1 Comparison of gamma passing rates(%)
2.2 单野剂量分布比较
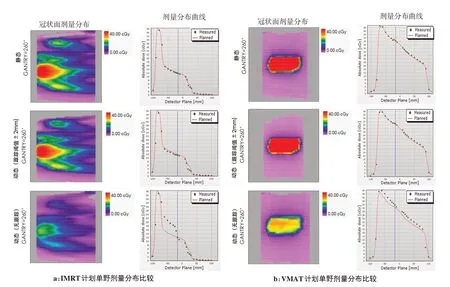
图3 单野剂量分布比较Fig.3 Comparison of single-field dose distribution
图3是使用ScandiDos软件显示IMRT、VMAT计划单个调强野下静态、动态运动阈值±2 mm、动态无跟踪情况下测量的冠状面剂量分布图及剂量分布曲线,可见在动态靶区剂量分布沿运动方向的差异明显,中心及靶区周边均出现剂量跌落的现象,IMRT较VMAT剂量跌落更为明显。呼吸运动会导致实测剂量分布与IMRT 计划剂量分布差异很大,使用Calypso 实时跟踪,设置运动阈值≤±3 mm,动态下靶区剂量分布与计划剂量基本吻合,确保肿瘤不漏照射。
3 结论
对于胸腹部肿瘤患者,呼吸运动导致的肿瘤运动可显著引起剂量误差。有学者通过CT扫描分析表明由于呼吸及心脏跳动等因素导致的胸腔内肿瘤运动在SI方向上运动范围最大(平均1 cm)[7-10],Mechalakos等[11]通过荧光透视影像的研究也得出类似结论。本研究发现,静态下靶区剂量分布可见明显锯齿形分布,动态下靶区剂量分布出现明显“模糊效应”,锯齿分布几乎消失,靶区边缘适形度变差,这种差异主要出现在小野和射野边缘处(图3),动态测量时IMRT计划各子野剂量偏差平均值约±32%,VMAT计划各子野剂量偏差平均值约±28%。目前多数研究是基于模体建立数学模型等方法来说明呼吸运动对剂量的影响,4DCT界定肿瘤运动范围、Varian Gating呼吸门控、Elekta ABC自主呼吸技术、CBCT校正摆位等技术虽可以指导临床肿瘤治疗方案和计划设计,但不能完全消除实际呼吸运动造成的剂量影响[12]。
Balter 等[13]和戴振晖等[14]通过模体研究表明Calypso 系统定位精度可达亚毫米级,Mao 等[15]的研究表明Calypso 植入式转发器植入患者体内用作肿瘤位置跟踪是可靠的,位置精度可达±1 mm。本研究中应用Calypso电磁跟踪系统对靶区进行实时跟踪,通过采集靶区实时位置信息进行在线四维剂量验证,比较动态测量时有、无Calypso 引导以及不同运动阈值下实时三维剂量验证的结果,探讨肿瘤实时跟踪对胸腹部肿瘤治疗剂量精度的提高,实现了4D剂量验证,对运动肿瘤放疗有一定指导意义[16-20]。
