导弹测发控系统CAN总线拓扑结构的分析及选择∗
2019-06-06陈基昕赵锦宇
陈基昕 王 忠 赵锦宇
(火箭军工程大学 西安 710025)
1 引言
导弹测发控系统是对导弹各信号和系统性能进行测试,配合地面测试设备检查是否符合发射条件,对检查合格的导弹按命令进行发射的系统[1]。系统采用总线分布式的测控技术,可以简化系统结构,有利于各测试设备模块化、一体化的设计,提高系统的可靠性和实时性。弹上设备和地面设备之间大信息量的交互采用以太网实现,小信息量的交互采用1553B总线实现,而地面设备的通信以CAN总线互联。随着导弹技术的发展,导弹测发控系统正向多主、全分布式网络集成化方向发展[2],选择一个合适的网络拓扑结构有利于最大化的发挥网络性能。本文主要研究导弹地面测发控系统的拓扑结构,通过分析典型的拓扑结构,并根据系统的信息流分别计算总线的负载率,选取总线型和星型混合型的结构作为系统的拓扑结构。
2 导弹测发控系统概述
2.1 导弹测发控系统节点定义
导弹测发控系统需把弹上和地面设备看成一个整体,并按照固定流程,严格把控设备工作的先后次序,相互统筹配合才能完成。弹上被测信号由信号转接箱引入地面测试设备,进行信号调理和测试,由地面测发控系统对测试结果进行处理、分析和判断是否出现故障,若测试合格则按正常操作流程进行导弹的发射任务。导弹测发控系统包含了主控单元、远控单元、发射控制台、自动测试设备、测发控计算机、指挥自动化、信号转接箱、产品等效器、地面测试电源、绝缘通路测试仪、定位定向设备等节点,节点定义如表1所示。

表1 导弹测发控系统节点定义表
2.2 导弹测发控系统信息流分析
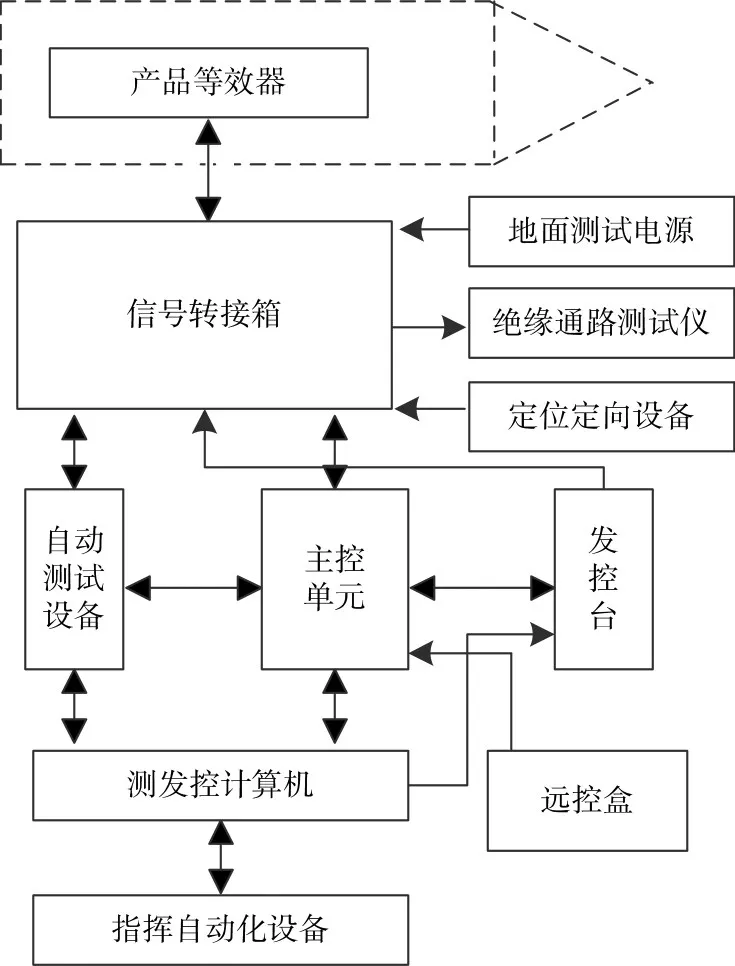
图1 导弹测发控系统的结构组成图
本文主要对导弹地面测发控系统做研究,故对弹上信息流不做过多分析。地面测试设备以主控单元作为导弹测发控系统的核心,是人机交互的窗口和显控终端,主要用于指挥员向各测试设备输入决策指令,它可直接与远控盒、发控台、测发控计算机、自动测设备、信号转接箱等设备直接通讯,接收来自这些设备的激励、采样和测量数据并回读测试结果。远控单元可实时显示系统的测试数据,检查发射密匙是否正确,将检查结果发送至主控单元。发控台需手动控制,向信号转接箱输入配电信号,向主控单元发送控制信号,发控台的发光二极管用于监测信号传输是否稳定。自动测试设备负责采样地面设备的测试数据并将激励信号源传送给信号转接箱,该节点自身具备电源,无需外部供电。指挥自动化设备用于收集、传递和处理信息,如当系统发现故障需紧急断电,则指挥自动化系统会通过指挥自动化设备将报警信号传至测发控计算机,中止发射任务,导弹测发控系统需与指挥自动化系统共同配合完成导弹的发射。在导弹的实际测试中一般用产品等效器来模拟导弹的输入输出[3],与地面测试设备进行通信,如姿态控制信号、惯组运动参数、弹上的开关量信号、待测模拟信号等,通过信号转接箱接入地面测试设备。地面测试电源、绝缘通路测试仪、定位定向设备等节点也是通过信号转接箱实现弹地数据的通讯。系统的结构组成图如图1所示。
3 典型CAN拓扑结构
总线的拓扑结构即各节点的互连方式,对网络的可靠性、通信效率等性能都有很大影响。选择一个合适的网络拓扑结构是实现CAN协议的基础,有利于降低通信费用,提升整个网络的性能。常见的拓扑结构有总线型拓扑、环型拓扑、星型拓扑等[4]。

图2 常见类型拓扑结构示意图
1)总线型拓扑结构
总线型拓扑结构是用一根电缆连接网络中所有节点,各节点的分支连接到CAN总线的主干电缆。当某节点发送数据到总线上时,网络上的所有节点均能帧听到此数据,只有目标节点才能接收此报文,其余节点待目标节点接收完毕后才能忽略该报文。总线型拓扑结构易于实现且构建成本较低,但其容错能力和可拓展性较差。
2)环型拓扑结构
环型拓扑结构各节点通过总线构成一个封闭的链路,数据流沿着一个方向单项传输。环形拓扑结构的实时性好,数据传输吞吐量较大,可作为高速链路使用,但其灵活性差,不易拓展。当环形拓扑结构中的一个节点发生故障时,会导致整个网络的瘫痪,对于导弹测发控系统的而已,系统在测试过程中有可能会遭到攻击而导致某节点被破坏,进而影响整个系统工作,因此环型拓扑结构不适用于导弹测发控系统中,本文不作研究。
3)星型拓扑结构
星型拓扑结构是一个中央节点连接多个分支节点的网络结构,所有节点间的通讯必须经过中央节点再发送至目的节点。星型拓扑结构集中式的特性使得网络易于拓展,且网络稳定性较好,当某一个分支节点因故障而中断时不会对整个网络产生太大的影响,但相比于其他网络拓扑结构,星型拓扑结构需要消耗更多的电缆,增加了构建网络的成本。
4 总线负载率的计算方法
总线的负载率是指在数据传输过程中,实际传送速率与理论上最大能传送速率的比值。总线的负载率过高即总线上通信过于繁忙,则低优先级的报文有可能因为长时间的仲裁失利而导致通讯延迟,甚至出现丢帧现象,总线的负载率过低,则会使总线不能被充分利用导致资源浪费。因此,严格控制CAN总线的负载率在合理范围内,有利于维护网络的实时性。一般在工业控制系统中,总线的负载率应该维持在30%以下,而军用场合最高可允许总线负载率达到50%~70%[5]。
4.1 总线负载率影响因素
CAN总线的负载率与数据帧的结构、位填充机制、帧间空间以及报文类型有关。
1)数据帧结构
CAN的帧类型包括数据帧、远程帧、错误帧和过载帧等,为便于计算本文以数据帧为例。数据帧分为标识符为11位的标准帧格式和标识符为29位的扩展帧格式,数据帧的各位场格式固定[6],其位数结构分布如表1、2所示。

表1 标准数据帧结构

表2 扩展数据帧结构
2)位填充机制
CAN总线中使用了“位填充”规则,也就是在实际传输位流时,当发送器检测到一帧数据中有连续5个相同的位,则在后面自动添加一位补码位即填充位。文献[7]中指出对于长为x位的数据流,极端情况下最大位填充量为(x-1)/4位。填充规则示意图如图3所示。其中数据帧和远程帧的CRC界定符、ACK场、帧结束,错误帧,过载帧均有固定格式,不做位填充处理[8]。
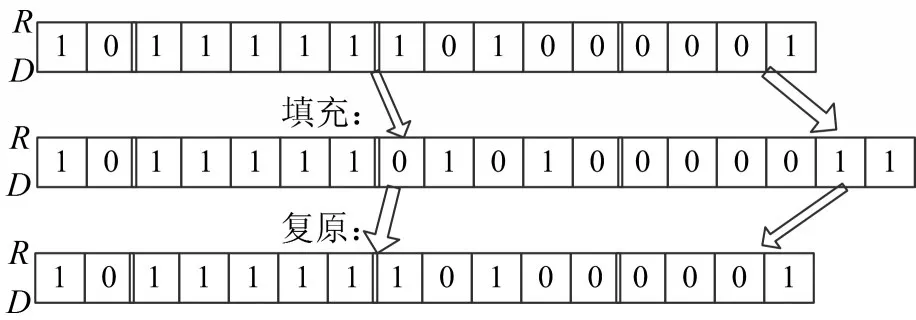
图3 位填充机制示意图
3)帧间空间
总线上发送的报文帧与帧之间由帧间空间隔离,帧间空间由3位隐性位的间歇场和位数不限的空闲位场共同组成,因此帧间空间的长度至少为3位。间歇场期间总线上不允许发送报文,且错误帧和过载帧无帧间空间[9]。计算总线负载率时应当将帧间空间考虑在内。
4)报文类型
在CAN的测控网络中,有些报文会按照固定的周期发送至某个节点,如发控台每隔一定时间就向主控单元发送一个用于检查自身工作状态的报文信息,这类报文称为周期性报文[10]。而有的报文只在因特定事件触发才发送,如某节点因故障而发出的报警信息,这类报文称为事件性报文[11],本文事件性报文的周期T取1s。
4.2 总线负载率计算方法
根据总线型拓扑结构的导弹测发控系统信息流分析,及各节点实际发送的报文,表3列出了部分总线型拓扑结构的报文预估表。

表3 总线型CAN拓扑结构报文预估表
设CAN总线上的选定位传输速率为Vbus,报文的发送周期为T。由表1可知标准数据帧Lregular=44,扩展数据帧Lregular=64,数据字段的字节数为N,因此一个数据帧的报文位数有4-1。考虑位填充在极端情况下的位数有4-2。帧间空间以最小的3位作计算,则有单个报文的总线负载率计算公式有式(3)。
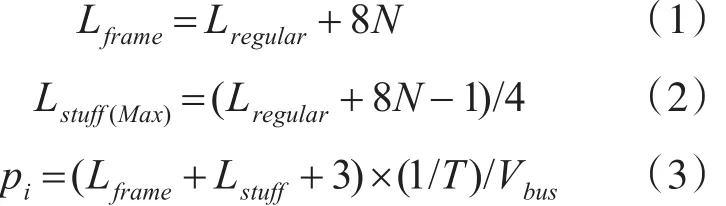
其中i=1,2,3…m,m为该节点发送报文的个数。则该节点的总线负载率为

以表3节点MCU第一条数据为例,使用标准数据帧Lregular=44,数据长度N=8,报文类型为周期性报文,其周期T=0.02s。文献[12]给出了CAN总线传输距离和位传输速率的关系如图所示,最远传输距离可达10km,在40m范围内最大传输速率可达1Mbps。考虑导弹测发控系统实际需求,两个节点的最大通信距离一般在200m以内,因此总线上的位传输速率选择Vbus=500kbps。

图4 CAN总线传输距离和位传输速率关系图
由式(3)有:

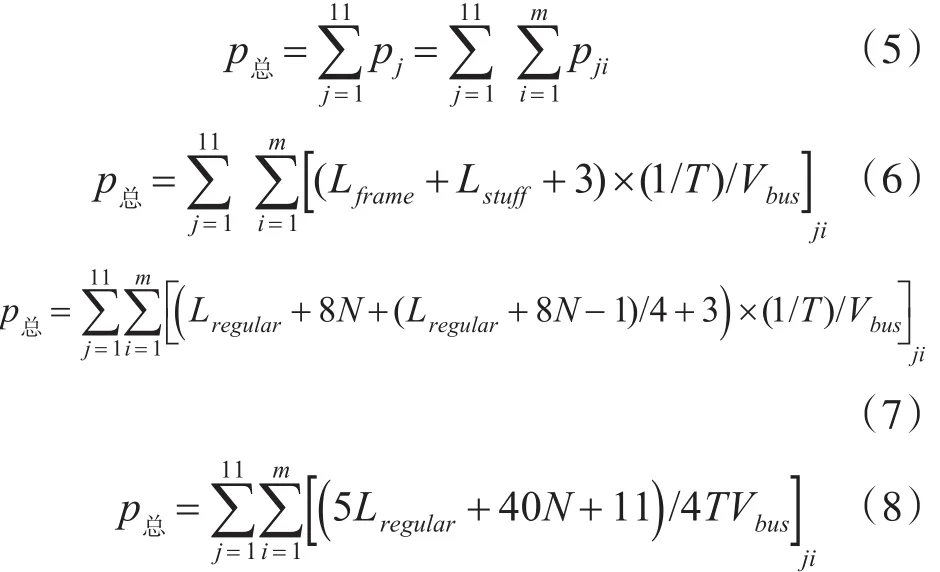
故该报文的负载率为0.55%。同理参照总线型拓扑结构预估表的所有数据依次对节点MCU的各报文进行计算,由式(4)得 p=10.02%,因此节点MCU的总线负载率为10.02%。本文研究的导弹测发控系统有11个节点,整个CAN网络的总线负载率即所有节点的负载率总和,计算公式如下:
经计算,总线型拓扑结构各节点的总线负载率如表4所示。
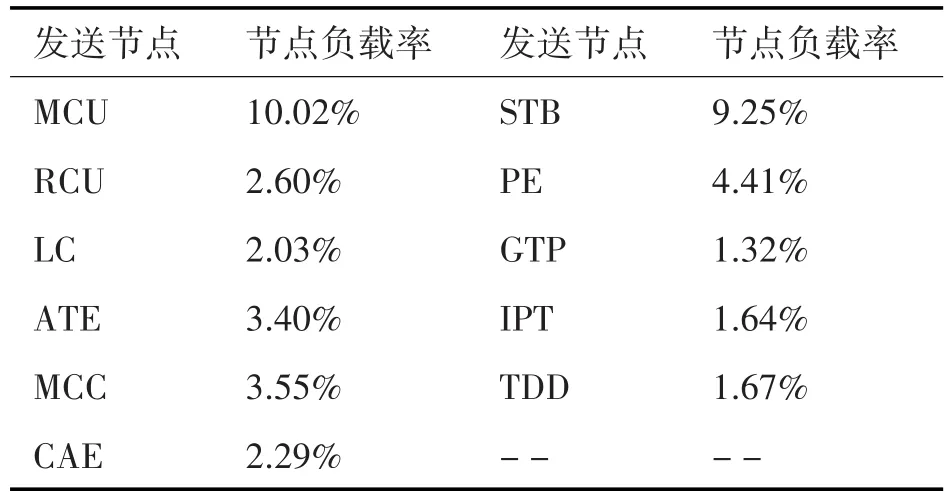
表4 总线型拓扑结构各节点的总线负载率
由式(8)得总线型拓扑结构的总线负载率为p总=42.18%,总线的负载率在合理的范围内,但军用条件下该网络负载率显得比较浪费资源。
5 总线型和星型混合型拓扑结构
5.1 系统负载率的理论计算值
星型拓扑结构的稳定性较好,节点通讯需通过中央节点转发,因此总线上传送的报文数量有所增加,其报文预估除中央节点外与总线型拓扑结构基本一致,按上述方法对所有节点的报文进行计算星型拓扑结构的总线负载率为61.80%,其中中央节点的总线负载率为29.74%。星型拓扑结构的总线负载率符合军用场合的总线负载率要求,但总线的负载率较高,网络繁忙时有可能导致低优先级的报文通讯延迟,为保证CAN测控网络的实时性,可将导弹测发控系统各节点搭建成总线型和星型混合型的拓扑结构,网络结构组成如图5所示。
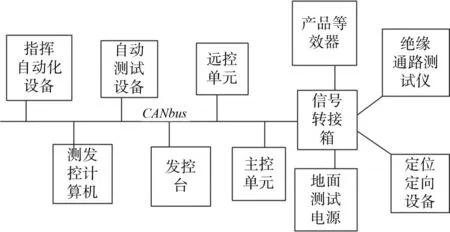
图5 总线型和星型混合型拓扑结构组成图
产品等效器、地面测试电源、绝缘通路测试仪和定位定向设备测试的数据均需要由信号转接箱接入地面测试设备,因此混合型拓扑结构星型方向以信号转接箱作为网络的中央节点,连接到总线型方向的主控单元,再依次将其他节点挂载在总线上。依照第4节总线负载率的计算方法对混合型拓扑结构的报文预估进行计算,其网络负载率为54.06%,符合军用场合的网络负载率的要求。
5.2 系统的仿真实验
系统的仿真实验,硬件平台使用11块CAN总线实验板模拟导弹测发控系统11个通信节点。实验板的主控芯片采用稳定性较好的STC89C52RC单片机,CAN控制器和收发器分别为SJA1000和TJA1050,且开发板上有一个4位的数码管和5个LED灯可用于显示通信的状况是否良好。为减小各器件的信号干扰,CAN控制器SJA1000的TX0端和RX0端并不是与CAN收发器TJA1050的TXD端和RXD端直接相连,而是在节点中引入两个6N137的光耦隔离电路以及一个B0505电源隔离模块,它能够有效地降低误码率,提高了电路抗干扰性,起到了电气隔离的作用。硬件接口电路原理图如6所示。将11块CAN开发板分别以按照总线型、星型、总线型和星型混合型的拓扑结构连成网络,并把CAN_H、CAN_L、VCC、GND端对应相连。其中的一块开发板接CAN分析仪,CAN分析仪可以通过USB接口把CAN网络与电脑的上位机软件CANTest相连。

图6 硬件接口电路原理图
CANTest是由广州致远电子有限公司开发,配合CAN分析仪使用的专业上位机软件,可对CAN通信数据进行采集、处理以及对数据的收发进行实时的监控。当网络上的通信稳定时,CAN分析仪的绿色指示灯按照均匀的时间间隔闪烁,此时点击BusFlow,可以打开总线实际利用率的界面,监测到当前总线的实际利用率,调整刷新时间可调整界面的显示速度。总线型、星型、总线型和星型混合型的拓扑结构实际利用率如图7、8、9所示。
实验结果对比理论的计算结果稍有偏差,是由于实验中受实际终端电阻、电源电压和共模干扰等原因,但是不影响对拓扑结构的适应性选择。相比于总线型和星型拓扑结构,混合型的网络拓扑结构充分利用了总线资源,且避免了因总线过于繁忙而导致通讯延迟,达到了导弹测发控系统实时性的要求。

图7 总线型拓扑结构实际负载率界面

图8 星型拓扑结构实际负载率界面
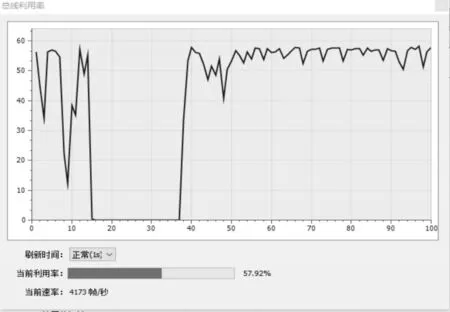
图9 总线型和星型混合型拓扑结构实际负载率界面
6 结语
导弹测发控系统是一个对可靠性和实时性要求极高的系统,本文以CAN总线的网络负载率为指标,参照军用条件下的总线负载率标准,选择适用于导弹测发控系统的网络拓扑结构,但是对拓扑结构的分析不仅可以计算网络负载率,还可以对每条报文的最大响应时间进行分析,验证每条报文是否满足约束条件。本文对导弹在实际测试、发射和控制过程中具有一定的应用价值。
