一种基于多传感器数据融合的智能旅行箱设计
2019-06-03罗奕帮谭晓静陈海亮陈金佳张江银
罗奕帮,谭晓静,陈海亮,陈金佳,张 镇,张江银
(闽南理工学,福建 石狮362700)
0 引言
近年来,我国箱包市场逐渐推出智能旅行箱系列产品,智能化通常体现在安检自动开锁方面,或者手机可以在拉杆箱上充电,或者智能防丢报警,或者设计万向轮以及箱子外观等方面,功能比较单一,市面上出现的儿童智能旅行箱的功能也局限在静音万向轮,伸缩自如的拉杆,能够实现自动跟随、智能放丢、移动充电等功能的旅行箱很少,价格较高,使用人数较少。基于传统只有推拉功能的旅行箱,本文设计的智能旅行箱可以实现遥控追随,距离报警,定位追寻,对外充电,称重等基本功能。最大限度的方便使用者的旅途,为使用者解决对于旅行箱的各种“后顾之忧”。
1 系统设计
本产品通过多种传感器感应和处理数据实现对使用者的寻迹追随,省去肩拉担扛的烦恼;并实现“物物相连”,使使用者不必躬身探查行李箱以了解行李箱的各种状态,只需要通过身上必备的手机,使用其上的APP即可实时了解行李箱的各种状态,比如:当与使用者的距离超出范围时自动发出警报提醒使用者;对外充电,出门在外手机没电或者其他用电设备没电时,可使用行李箱对其反向充电;当使用者想了解自己行李箱所承载的重量是否超出飞机等运输设备的规定范围时,可通过APP即可了解所有物的重量;当使用者不幸丢失行李箱时,可通过APP知详行李箱的位置,进而寻回。具体见图1、图2。
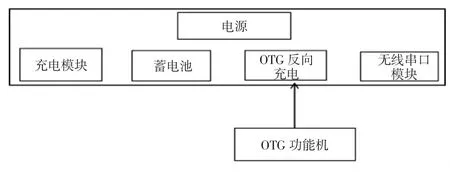
图1 电源框图
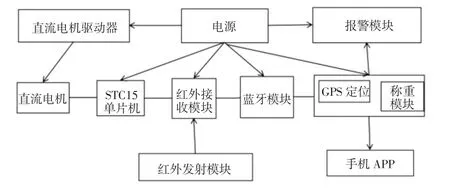
图2 智能旅行箱框架结构图
2 系统实现
本设计采用直流电机、单片机、蓝牙模块、GPS定位模块[1]、报警模块依次相连,电源模块采用蓄电池提供各模块供电,利用OTG技术[2],输出降压电压实现反向充电,供随身电子设备手机或其他用电设备充电,反向充电手机类型仅适合魅组、三星、小米、华为等具备OTG功能机;采用STC系列单片机,直流电机由直流电机驱动器驱动,采用电流精确检测技术、有刷直流电机转速自检测技术、再生电流恒电流制动、PID调解技术,可较好控制电机启动、制动、换向过程和堵转保护;蓝牙模块用于追踪行李箱的踪迹;定位模块进行GPS定位,将定位信息反馈到智能手机APP上,监测行李箱运动轨迹,将行李箱定位导航信号传递至蓝牙模块,蓝牙模块发送控制信号给单片机,驱动直流电机控制旅行箱的运动,实现行李箱的自动跟随功能,当行李箱超过预定距离时,发送信号至报警模块,发出语音报警,放丢失。
3 技术实现
3.1 智能手机APP
本系统充分发挥“互联网+”的优势[3],开发相应的手机APP,通过智能手机软件实现对旅行箱的控制,通过APP连接蓝牙,实现使用者-行李箱的人机连接,从而实现在蓝牙控制下自动跟随,将位置信息反馈给手机APP实现对旅行箱的定位导航,同时追踪运动轨迹,本系统可控制跟随主人在地毯、毛毯、水泥路、大理石等地面活动,当离开主人10 m以外发出语音提示信号,实现行李箱防丢失。如图3所示,通过智能手机APP实现地图轨迹跟踪,遥控器控制的双控制操作。
图3APP操作界面
3.2 自动称重
重量检测模块采用电阻应变片称重传感器(见图4),额定载荷20 kg。检测原理是在被测物体上贴附应变片,被测物体表面发生变化时应变片里面的金属箔随之弯曲,根据金属发生机械弯曲时电阻会发生相应变化的原理,根据应变片的弯曲度,就可以确定电阻变化,输出电压发生变化。因此使用者想了解自己行李箱所承载的重量是否超出飞机等运输设备的规定范围时,可通过APP即可了解所有物的重量。
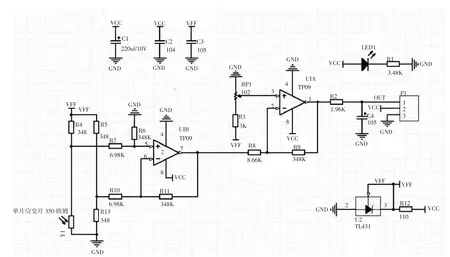
图4 称重传感器原理图
3.3 红外接收模块
本设计中通过红外接受模块,判断使用者位置,通过5~10个红外传感器采集行李箱前面的红外反射数据,至单片机,控制直流驱动电机器,实现行李箱的运动控制,可实现前进、转向、后退。单片机系统接收红外数据,根据数据显示结果控制距离阈值的修改。本模块采用具有寻迹、避障功能的红外传感器,检测距离在50 cm以内,通过发射管发出的红外线,遇到障碍物(使用者),红外线发射回来,接受管接收信号。该模块检测角度0~350,通过阈值比较电压实现检测距离可调,比较器采用LM933,工作性能稳定,该传感器较广泛用于智能小车避障,机器人避障等领域,并且抗干扰性较强,装配方便,本设计经过调试效果较好。见图5。
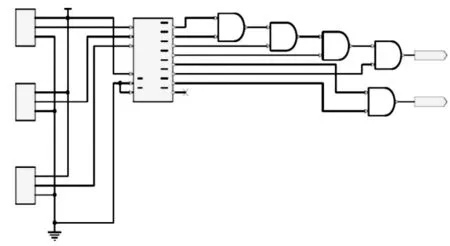
图5 避障电路原理图
3.4 蓝牙模块
采用HC-06蓝牙串口模块[4]、蓝牙2.0协议,通用性比较高,可以用于许多工业数传。作为蓝牙串口,也可以于iPhone和Android设备以及模块之间连接透传。本设计旅行箱自动跟随功能融合蓝牙、红外定位双重技术,使智能旅行箱跟随主人在地毯、毛毯、水泥路、大理石等地面活动,贴合实际运行模式。见图6。
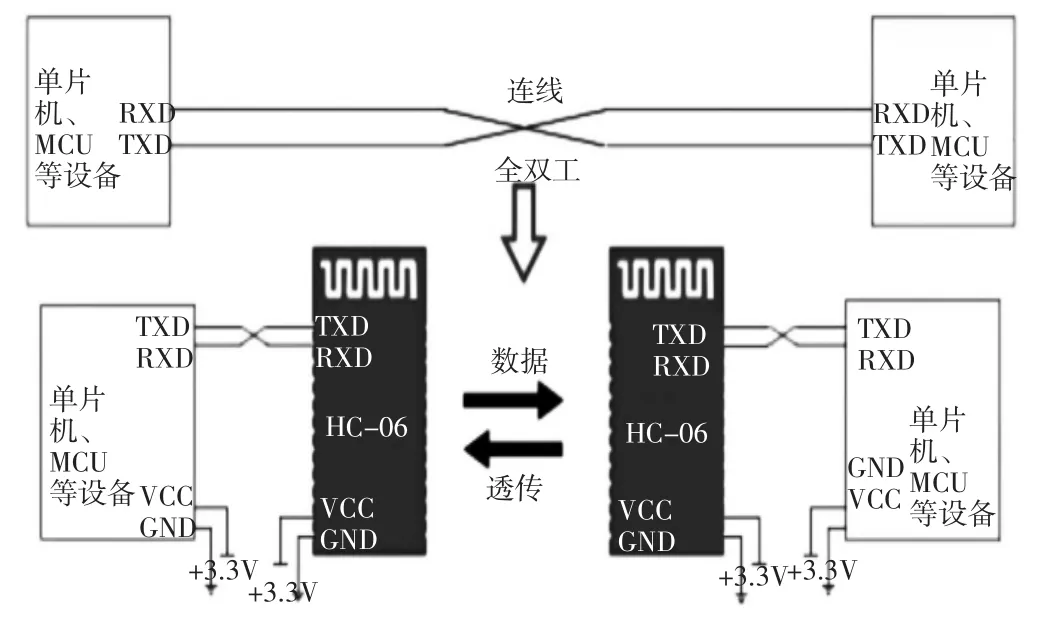
图6 蓝牙模块原理图
4 算法实现
本设计通过多传感器信息融合技术实现对使用者的寻迹追随。自动跟随模块采用5个红外传感器采集使用者当前位置信息,传送给上位机,通过显示数据进行阈值的修改。
如果采用单一传感器采集到的数据往往含有噪声,加上传感器自身存在均方误差,因此从含有噪声的数据中得到的估计值必然存在估计误差,误差值有随机性,使用此类数据会使系统的精度和实时性降低。因此可利用同种类多传感器测量同一数据。本文对距离数据采用多组红外传感器进行自适应加权估计数据融合算法[5]。根据门限值对各传感器方差的变化值进行估计,按照加权系数平方和最小原则,对参与融合的各传感器加权系数进行调整,确保融合数据的均方误差一直保持最小,这种算法并不需要传感器测量数据信息,该算法估计从理论上可以证明有线性无偏最小方差的特点。
检验数据一致性:设有N个传感器对某一对象进行测量,N组数据Xi(i=1,2,…,n),按照检验准则进行数据检验,相邻两数据差不超过给定门限值:

其中ε由传感器精度确定。
加权系数估计:设N个传感器对某系统状态参数的观测方程:
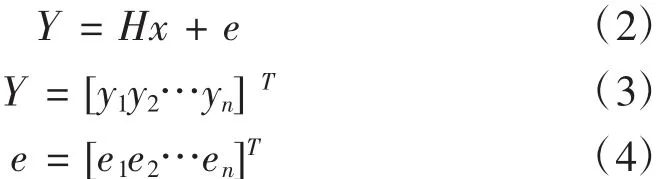
其中,Y为n维测量向量,x为一维状态量,e为n维测量噪声向量,含噪声信号,H为n维常向量。采用加权最小二乘法估计准则,从向量Y中估计状态量x,取加权误差平方和最小值:

设正定对角加权阵W表达式:
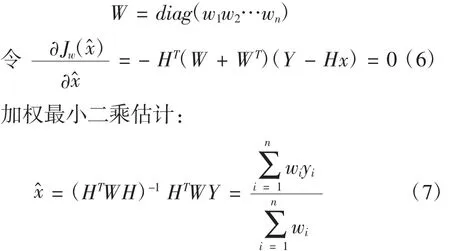
具体算法:取两个不同传感器p,q,得到观测数据 Xp,Xq,计算互协方差函数 Rpq,Rpq=E[XpXq]=E[X2],计算Xp自互协方差函数 Rpp,计算 Xp,Xq互协方差函数Rpq,根据传感器测量到的k个数据,进行时间域估计;

对每个传感器对应的最优加权因子,根据各自传感器的测量数据以自适应方式求出来。经验证,在单传感器不能提供信息不够准确和可靠度不高的情况下,使用多传感器进行数据融合,减少信息的模糊度,能够改善系统的可靠性,增加确认目标的可信度,有效提高系统性能。
5 智能旅行箱的特点及注意事项
本设计自动跟随旅行箱采用红外传感器,体积小,成本较低,可应用于搜索和跟踪红外目标,确定空间位置并且能够对其运动轨迹进行跟踪,根据传感器数据显示发出左传、右转、前进指令,在光滑路面可以成功实现自动跟随功能。当离开主人10 m以外发出警告。可自动称重。在行李箱电能富余时,手机没电或者其他用电设备没电可对其反向充电。当行李箱丢失时,可在APP上通过GPS定位寻回。但是在非光滑路路面以及较恶劣天气条件下,存在操控较困难的问题。
6 结束语
本文设计的旅行箱采用的智能技术体现在通过互联网模块推送APP信息给使用者,通过避障传感器使行李箱在跟随使用者途中能够避开遇到的障碍物,完善了旅行箱智能化和人性化的功能。在国内旅行箱市场上鲜有同类型产品,有广阔的市场前景。多传感器感应和数据处理的融合技术算法可以运用在探测、跟踪、目标识别领域,可以提高系统的有效性,能够增强系统的生存能力,提高数据的可信度等优势,但是目前多传感器数据融合存在理论体系尚不完整的缺点,该算法应用在智能控制领域方面有待进一步完善和提高。
