基于SW的非圆圆柱齿轮参数化设计及仿真分析
2019-06-03方立霞张天萌
王 丹 ,方立霞 ,2,张天萌
(1.中国矿业大学银川学院机电动力与信息工程系,宁夏 银川750011;2.中国矿业大学(北京)机电与信息工程学院,北京100083)
0 引言
非圆圆柱齿轮也称异形齿轮,是一种分度曲面不是旋转曲面的齿轮,组成非圆圆柱齿轮高副后,在啮合过程中,瞬时角速度比按某种既定的运送规律而变化[1],故可实现变传动比和特殊的运动和函数运算,对机构的运动特性很有利,可通过改善机构的运动条件,进而有效提高机构的运动平稳性能。
1 非圆圆柱齿轮概述
非圆圆柱齿轮属于一种特殊的圆柱齿轮,由于其节圆是非圆节曲线,故非圆圆柱齿轮兼有圆柱齿轮和凸轮传动的优点,即能实现凸轮的变数传动且易于控制,又能实现齿轮的精确高效且载重平衡,整体结构紧凑,刚性好,传动平衡,相对于圆柱齿轮更适合于高精度传递效率更高的操作要求,更适合复杂机械的应用。与此同时,非圆圆柱齿轮机构还可以实现变传动比传动,与某些机构组合可以实现特殊规律的运动[3,4,5]。目前,非圆圆柱齿轮的应用前景前景广阔[6],例如:在纺织机械中使用非圆圆柱齿轮周习性改变经纬纱的密度以得到不同的花纹;在卷烟机的传送带上用非圆圆柱齿轮实现间歇式驱动机构;在插齿机主运动机构中采用一对非圆圆柱齿轮来驱动曲柄连杆机构,可使主轴在工作行程中的速度变化均匀,加大回程加速度;在多轴车床中,采用一个主动非圆圆柱齿轮同时带动5个非圆圆柱齿轮的机构以获得变速比传动等[7]。
2 非圆圆柱齿轮结构参数
非圆圆柱齿轮的轮齿结构几何参数包括:轮齿、齿槽、端面、法面、齿顶圆、齿根圆、基圆、分度圆等,如图1所示。配对轮齿互相接触,从而完成齿轮的持续啮合运转[7]。非圆圆柱齿轮的设计关键是:确定满足传动比要求的齿轮节曲线,设一对非圆圆柱齿轮的中心距为a,则满足a=r1+r2(r1和r2分别为两非圆圆柱齿轮分度圆半径)。

图1 非圆圆柱齿轮参数结构
3 非圆圆柱齿轮机构几何参数设计及计算
3.1 非圆圆柱齿轮设计及计算
非圆圆柱齿轮的已知参数如表1所示:

表1 非圆圆柱齿轮设计参数
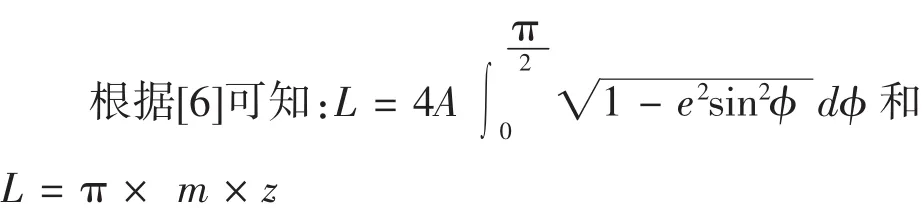
式中:L为节椭圆周长;φ为啮合转角(此处取单次啮合转角 180°);
将表1中已知数据代入,可计算非圆圆柱齿轮长半轴:A=90.82 mm
计算椭圆短半轴:

3.2 非圆圆柱齿轮齿廓设计
首先,作椭圆:长半轴A=90.82 mm,短半轴B=60.74 mm;作椭圆弧上各点到右焦点的连线。根据非圆圆柱齿轮齿廓曲率半径

和 R= ρcosα0,α0=20°(式中 R 为当量齿轮基圆半径),求出非圆圆柱齿轮齿廓曲率半径,见表2。
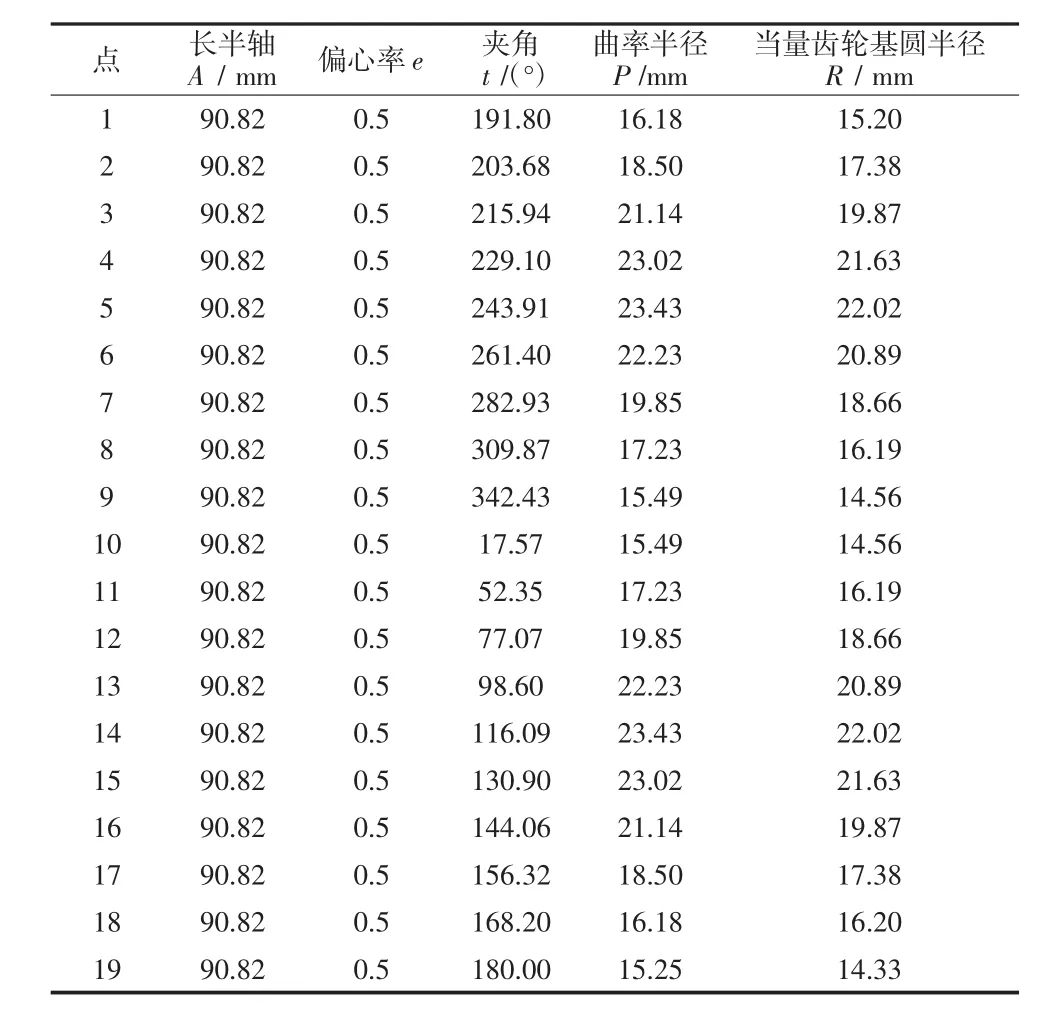
表2 非圆圆柱齿轮曲率半径数据
按照表2中非圆圆柱齿轮齿廓曲率半径,同时结合各点的渐开线的直角坐标系参数方程:
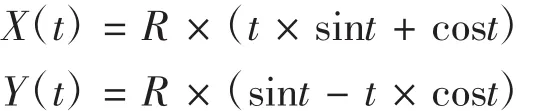
最终得出基圆半径R的渐开线绘制齿形如图2所示。以对应的渐开线与椭圆节曲线上的交点为上直线L1,以L1为轴线镜像与其相邻的曲线直线L2,如图3所示。

图2 正反向渐开线曲线轮廓
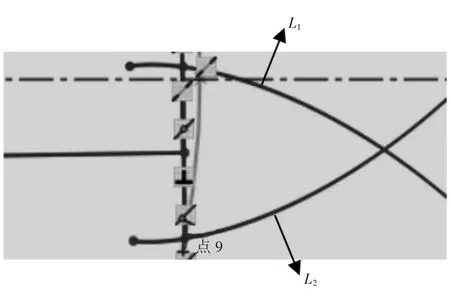
图3 正反向渐开线相交
同理作椭圆齿轮的齿顶椭圆和齿根椭圆,再作曲线根部的切线“剪裁实体”得到图4,最终得到齿轮齿形图5,进而调整并确定非圆圆柱齿轮全部几何参数如表3。

图4 齿轮齿顶齿根圆
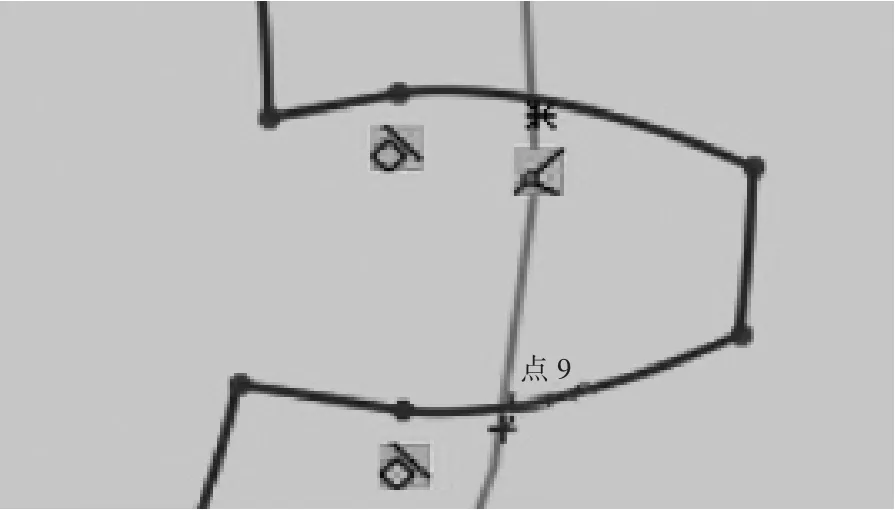
图5 齿轮齿形

表3 非圆圆柱齿轮基本几何参数
3.3 轴及标准件的设计计算
齿轮轴需要定位齿轮厚度为10 mm,根据轴径估算公式得最小轴径直径为10 mm,设计计算出轴径最大径直径为20 mm,轴的总长度为40 mm,初步拟定轴段结构方案如表4。

表4 输入轴各轴端尺寸及长度
此处轴的设计及校核计算从略,以及以及轴端上将来安装非圆圆柱齿轮的安装要求,利用My Function设计出相应的满足强度条件的平键如图6所示。

图6 键的校核

故平键设计满足强度要求。完成最终轴段结构设计。
键的强度校核满足要求弯曲应力:
4 基于SolidWorks的非圆圆柱齿轮参数化建模及装配
4.1 非圆圆柱齿轮机构建模
(1)非圆圆柱齿轮的建模
“拉伸凸台”得椭圆齿轮,在椭圆齿轮中心完成用于连接按照的轴孔,单个非圆圆柱齿轮完整模型如图7所示[2]:
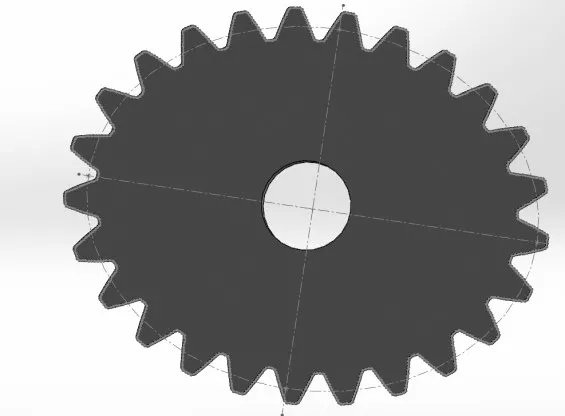
图7 单个非圆圆柱齿轮完整模型
(2)齿轮轴的建模
建立φ15的齿轮轴以及用于连接非圆圆柱齿轮的标准平键键槽如图8轴所示。
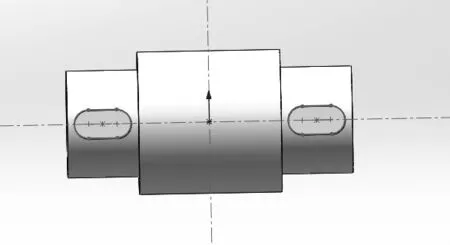
图8 轴的模型
4.2 非圆圆柱齿轮机构的装配过程
首先将普通平键装入非圆圆柱齿轮轮轴的键槽内,并加入侧面和底面配合关系进行定位,其次加入非圆圆柱齿轮配合节曲线机械配合,两非圆圆柱齿轮同轴心后,最终完成非圆圆柱齿轮机构装配体如图9所示。

图9 非圆圆柱齿轮机构装配轴模型
5 非圆圆柱齿轮机构的运动仿真
5.1 非圆圆柱齿轮啮合动态仿真
在实现动态仿真前,先在装配体模式下对齿轮进行动态模拟。单击装配体中“模拟”按钮,设置主动非圆圆柱齿轮的驱动旋转方向和驱动速度。
5.2 非圆圆柱齿轮的仿真分析
使用SolidWorks Motion对非圆圆柱齿轮进行仿真运动分析,如图10所示。非圆圆柱齿轮机构的动态运动特性性能如下图所示。
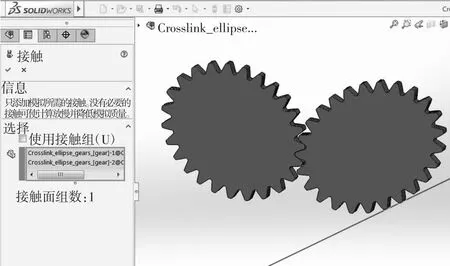
图10 非圆圆柱齿轮机构运动仿真模型
(1)非圆圆柱齿轮啮合角速度变化曲线如图11所示。

图11 非圆圆柱齿轮啮合角速度运动
因非圆圆柱齿轮角速度是稳定匀速运动60 deg/sec,故角速度加速度为0 m/s2,所以运动速度稳定匀速,充分验证了非圆圆柱齿轮匀速运动特性的正确性。
(2)非圆圆柱齿轮轮齿啮合力仿真曲线如图12所示。

图12 非圆圆柱齿轮啮合齿的啮合力
非圆圆柱齿轮轮齿啮合力仿真曲线如图12,从变化曲线可以得到:两轮齿之间的啮合力在两非圆圆柱齿轮啮合瞬间发生渐变,8.2 s的时候达到最大值为125.3 N,在13 s的时候达到第二个峰值为105.5 N。且该啮合力变化呈周期性变化。
6 总结
本文鉴于非圆圆柱齿轮的可实现变传动比的特性展开研究,通过非圆圆柱齿轮的参数设计,计算出非圆圆柱齿轮的几何参数,并利用虚拟样机样机软件Solidworks对非圆圆柱齿轮进行三维参数化建模,在此基础上构建了非圆圆柱齿轮副运动仿真模型,从而实现了椭圆齿轮三维参数化设计,最后通过Motion对非圆圆柱齿轮进行了动态运动特性仿真分析,从而为非圆圆柱齿轮得设计开发提供了设计参数化模型及依据。
