舰船推进负载管理技术研究现状和发展趋势
2019-06-03林云峰付立军肖雄波
林云峰,付立军,夏 立,肖雄波
(海军工程大学 舰船综合电力技术国防科技重点实验室,湖北 武汉 430033)
0 引 言
舰船综合电力系统由发电、输配电、变配电、推进、储能、能量管理6个分系统组成[1],电力推进负载的引入是综合电力系统的一个显著特征,从目前已经服役的国内外综合电力系统舰船可知,电力推进负载功率占发电机组容量比重均较高[2-3],如表1所示。
推进负载的异常功率变动可能会导致发电机组过载、电能质量下降等问题,同时,推进负载管理也是能量管理系统的重要组成部分,如图1所示。因此需要对推进负载进行有效管理[4],其管理水平关系到舰船的快速性、操纵性、可靠性、经济性、生命力等性能指标。
1 推进负载管理技术的研究现状
1.1 电力推进负载模拟技术
负载模拟系统一般由推进电机、联轴器、传感器、负载电机组成,如图2所示。负载模拟系统的目的是通过控制轴上的负载转矩模拟真实螺旋桨负载,作为负载管理技术的模拟应用平台。目前对螺旋桨负载模拟的设备主要有水力测功机、电涡流测功机、电力测功机和交直流电机等。异步电动机由于其经济性和优异的转矩动态响应能力并可以将能量回馈电网,近年来被广泛采用[5]。
在负载电机控制方式上,一般采用转矩闭环和前馈式间接矢量控制方式,由于模拟系统中存在联轴器等装置,存在模拟系统转动惯量补偿问题,采用负载转矩控制外环间接控制负载电动机电磁转矩,可以解决直接控制电磁转矩所带来的计算转动惯量补偿的问题[6]。由于电机负载高阶非线性,而且负载模拟需要在较大范围内变化,传统PID控制适应性差,模糊PI控制能够提高异步电机转矩控制的精确性、跟随性、稳定性[7]。
现阶段对于螺旋桨特性和船桨运动模型的研究较多,除了考虑到螺旋桨推力和转矩的计算公式外,还考虑到船对螺旋桨的伴流以及螺旋桨对船造成推力减额、三大附加阻力等因素。武汉理工大学还开展了对瓦格宁实验图谱拟合和推力系数、转矩系数修正的研究[8]。
在负载模拟平台技术上,模拟平台分为软件仿真平台、半实物仿真平台和缩比的实物平台3种[9-10]。
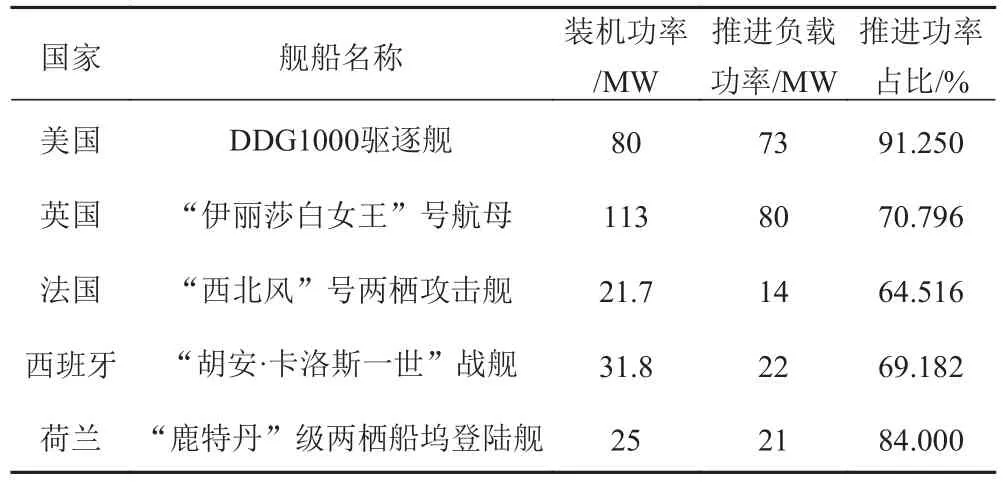
表1 各国主要综合电力舰船推进负载占比Tab.1 The proportion of major integrated power ship propulsion loads in various countries

图1 能量管理系统框架Fig.1 Energy management system framework

图2 负载模拟系统轴系结构Fig.2 Propulsion load simulation system structure
1.2 对推进负载控制策略改进的研究
舰船推进系统的结构如图3所示,主要包括推进电动机、减速器、螺旋桨等。

图3 舰船推进系统结构示意图Fig.3 Schematic diagram of ship propulsion system
推进负载具有恒功率特性,对综合电力系统稳定性造成影响,国外普遍采用加辅助控制环节来增强系统阻尼,避免发电机带推进负载时振荡失稳的问题。但该方法存在推进变频器控制复杂、控制特性易受影响等缺点。海军工程大学采用时域仿真和基于状态方程的特征值分析方法,计算中压直流综合电力系统的稳定性,改进了发电机、推进变频器等参数,解决了交流整流发电机并联运行时带恒功率负载时的稳定性问题[1]。
除了系统级的参数优化计算以外,根据环境对推进电机控制策略的改进也能够增强系统稳定性。文献[11]在平静海况下采取直接转矩控制或者转速控制,恶劣海况下采取抗过旋控制方法,实质上是一种转矩、功率结合的控制方法。
在推进电机加载速率控制的研究方面,文献[12]提出一种改进计算推进电机加载速率的方法,该方法根据船级社以及潜艇对电压跌落时间和电压跌落最大比率的标准,通过牺牲部分安全性来提高电机加载速度,系统安全裕量较小且对加速过程做了较多简化。
1.3 对功率限制以及重载询问策略的研究
1)动态功率限制和快速功率限制
由于推进系统的容量占比大,推进电机和螺旋桨以及传动机构构成的推进系统的运行状态直接影响到电网安全,主要分为2个方面。
①人为因素。如操纵人员非正常操作使得推进电机转速上升,推进负载快速增加,如果加载速度超过发电机响应速度,推进负载的功率需求将超过当前发电机组容量,发电机容易过载。
②非人为因素。如不良海况下,受浪、流影响,螺旋桨负载转矩波动,甚至可能因短时间内进出海面,导致100%负载突卸和突加,增加原动机的机械和热应力,增加燃油消耗。电力推进负载功率和推力与转速之间存在如下关系[13]:
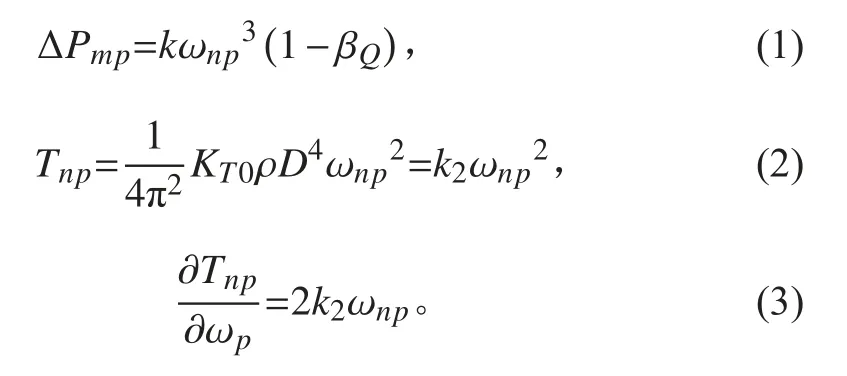
式中:ωnp为推进电机的额定转速,r/s;ΔP为电力推进系统瞬态负载变化量,W;k为在网机组数量;KT0为推力系数;P为海水密度,kg/m3;D为螺旋桨直径,m;ωnp为转矩减额系数;T为螺旋桨对船的推力,N。
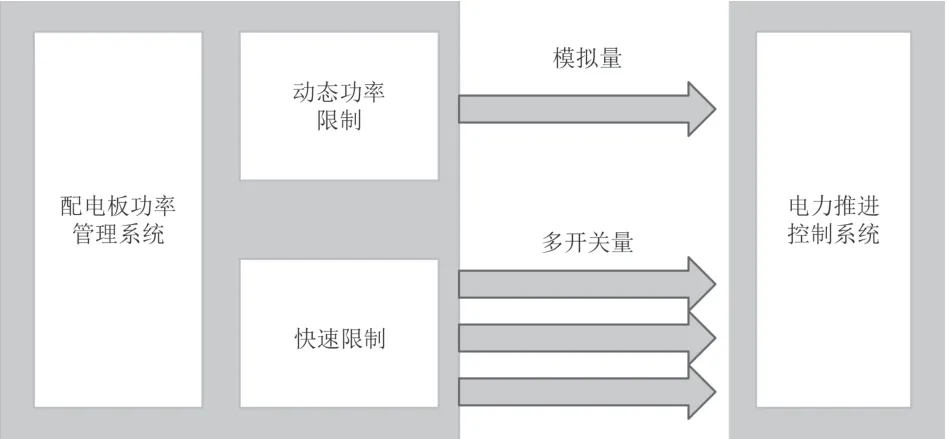
图4 动态功率限制和快速功率限制Fig.4 Dynamic power limit and fast power limit
由上述公式可以得出结论:电网功率与螺旋桨的额定转速成三次方正比,推力与额定转速成线性关系。推进负载管理系统必须响应推进功率波动。
功率限制的方法一类是基于剩余功率实时计算的功率限制,称为“动态功率限制”;另一类是基于事件触发的,称为“快速功率限制”[14]。如图4所示。
传统基于可用功率的方法在推进负载的功率投放速度方面太慢,结合舰船机动性和操纵性的需求,文献[15]加入发电机转速和转速加速度监测,并把它和传统的监测项目(发电机状态、实际消耗功率)一起作为功率限制条件,通过模糊逻辑控制器计算可支配功率,增强了功率限制策略的灵活性。由于推进功率随环境变化比较频繁,导致剩余功率信号变化大,若功率限制值随此信号调节可能会引起船舶电站振荡,可采用滤波的方法限制调节频率。动态功率限制解决了功率限制值动态响应的问题,但是由于存在滤波和通信环节,在快速性上难以起到保护作用,结合快速性要求,需要快速功率限制实现系统的快速保护。
快速功率限制是通过硬线直连方式连接电力推进控制系统,主要是应对电力系统紧急状况,如发电机组异常跳闸,逆变器、变压器等重要电力变换设备短路,安保装置失效等。推进变频器一般能够在50 ~100 ms的时间内快速减少功率消耗[5]。针对推进电机快速减载的过程,文献[16]提出了2种功率限制方法,一是在原有双环基础上增加功率环形成三闭环,二是在功率限制模式时切换转速、电流双闭环为功率、电流双闭环。
2)重载询问策略
重载询问机制主要考虑系统供电连续性和能量调度的经济性。电力推进负载是综合电力舰船的最大负载,推进系统启停和调速过程中触发增减机组的一般流程是:首先,能量管理系统(EMS)计算可用功率并传递给变频器控制单元,然后控制单元根据该信号监测推进器,在条件触发时进行功率限制并反馈功率需求给综合电力系统,最后综合电力系统据此进行增减机组,给出启动、调速允许信号。机动工况,系统可以设定较高的可用功率限制值,巡航工况时,则可以减少限制值。该方法称为恒定平均功率增减机管理原则,但是该原则存在系统功率需求响应速度慢的问题,为了提高响应速度,文献[17]提出融入重载负荷的采用恒储备功率增机、N-1 恒平均功率减机管理原则,将重载负荷的功率需求单独提取出来指导机组增减,减少了等待时间,增强舰船的操纵性能。
1.4 对储能单元和推进负载协调控制技术的研究
美国国家电力舰船发展和研究机构指出储能单元在舰船综合电力系统中具有广阔的应用前景,随着储能技术的发展,锂电池、超级电容器、飞轮储能装置等逐步进入上舰应用阶段[18-19],这也是高能武器上舰的必由之路。储能系统可以弥补紧急工况下发电机和推进电机之间的功率缺额,减少推进电机启动、调速过程对电网造成的冲击[20]。推进负载作为旋转的机械在运行时储存的能量还可以通过自动减载的方式用于高能武器系统的储能单元的充电过程中[21]。国外还展开了混合储能系统用于推进功率波动抑制的研究[22]。
在带有储能系统的舰船电力系统中,从电力系统、储能单元、推进负载三者的关系上来看,系统的功率传递模式可以按照如下方式配置。系统过载时,储能单元向电力系统放电提高系统带载能力;负载回馈制动时,储能单元吸收能量,替代制动电阻的作用并在反向推进过程中释放能量以减少发电机组的功率输出[23]。
舰船电力系统储能单元应用方面,国内外在拓扑结构、容量设计、充放电控制策略等方面开展了一些研究,但是针对推进负载管理的机动性需求和稳定性需求所做的研究国外有研究[24-25],国内上海海事大学等开展了部分研究[23]。上述研究大部分是针对民用电力推进船舶,针对综合电力舰船需求的研究较少。
2 今后的挑战和发展展望
经过几十年的研究,国内外对于舰船推进负载管理的研究已经取得了长足的进步,有些已经应用于实际舰船系统。结合现代舰船对电力推进系统高机动性、高可靠性、高自动化的需求,推进负载的管理技术,未来将呈现数字化、智能化、自动化、协同化的发展趋势。
2.1 数据质量管理技术
数据的获取和处理是进行推进系统状态评估等高级功能的基础和前提[26]。针对推进系统中的大量实时和非实时数据,引入数据质量管理技术(Data Quality Management)能够提高数据质量和推进负载的管理水平。在数据采集层面上,时间同步和信号快速采集技术需要深入研究。在数据处理层面上,全舰平台需要及时处理实时采集的数据,采用更高效的数据分发方式如DDS等,实时数据存储等先进的计算机信息处理技术,为实时能量调度提供数据支撑。
2.2 推进负载管理的平台技术
在综合平台方面,美国海军提出的全舰计算环境(TSCE)能够整合全舰计算资源,是未来舰船提高综合作战能力和信息化的有效手段[27]。推进负载管理的功能作为综合电力系统控制的子功能,需要将独立开发的功能进行平台迁移,同时根据任务性质要将任务划分为实时子任务和非实时子任务运行在不同的两级网络上。在充分高效利用共享信息资源,实现协调控制机制方面需要深入研究。
2.3 对复杂海况的研究和模式自动切换技术
受海浪、风、水流、尾场、螺旋桨进出水等影响,螺旋桨受到的机械力会通过机-桨耦合到电力系统,造成电力系统功率波动,影响电力系统稳定性。推进负载管理系统需要根据推进负载的波动分析海况并自动切换控制模式。对于海况环境的判断可以通过对给定控制模式下轴转矩、转速反馈得到,若超出该控制模式下的调控范围则自动切换到对应海况下的控制模式,提高自动化水平。
2.4 考虑储能的推进负载协同管理技术
受控的储能单元可以改进推进系统的运行状态,比如紧急加速、转速调节、以及快速制动过程中,提高舰船电网的安全以及改善舰船机动性。可以考虑的研究方向是有限储能容量下对于提高舰船机动性的效果;另一方面,推进负载作为一种旋转机械,其中蕴含着大量能量,而舰船具有惯性大的特点,其航行状态在功率短时间降低时不会发生较大改变。因此,在脉冲负载的储能单元充电时,可以短时间内降低推进负载的功率供给脉冲负载使用,保持发电机功率基本不变。可以针对脉冲负载的功率需求对推进负载自动降功率运行方面展开联合控制方法研究。
3 结 语
本文主要对国内外推进负载管理现有研究成果进行总结概括,从技术发展角度探讨了数据质量管理技术、平台技术、模式自动切换技术、推进负载协调管理技术等关键技术在舰船推进负载管理中的应用。舰船推进负载的管理涉及电机学、电力电子、流体力学、电力系统、自动控制、数学、通信等研究领域,多种物理场相互耦合,信息流和能量流相互作用。本文探讨的内容期望能够对推进负载管理技术的发展提供思路和借鉴,让有限能量更高效利用,发挥最大作战效能,提高舰船生命力和战术指标。
