仙泉煤矿井下导线网设计与测量成果分析
2019-05-28张继贤肖雨彤
张继贤,肖雨彤
(中国测绘科学研究院,北京 100039)
目前,国内外高等院校教师和矿山测量及其相关技术人员针对矿山测量工作,尤其是井上、下控制测量方面,做了大量的探索、分析和研究,取得了很多宝贵的经验和良好的技术方法,为矿山测量工作的正确实施提供了良好的依据[1]。国内矿山测量界,胡洪[2]教授在分析采用坚强边理论对陀螺定向导线进行分步处理算法优缺点的基础上,提出一种更为严密的矿井陀螺定向导线整体平差模型。张宇冉[3]提出利用严密函数式可以计算导线端点的点位误差以及计算加测若干条陀螺方位的导线终点误差。池深深[4]通过对井下等边直伸形方向附合导线优化方法及平差通用模型研究,提出了两种观点。罗亦泳[5]教授提出以柯西核函数与交叉验证法构建相关向量机,相关向量机是一种精度及可靠性高的矿区GPS高程异常拟合方法,对于快速测定矿区正常高有一定的参考价值。李建章[6]提出一种基于线性模型的导线网平差方法,利用该方法进行导线网数据处理,不需要解算待求点近似值。煤矿井下控制测量工作存在的主要问题或不足体现在以下两方面[7]:第一,井下导线各等级控制测量的方法有明确的规定,如±7″导线应一次观测两个测回,但正常作业也难免出现粗差甚至错误,可靠性难以保证;第二,规程中规定,井下导线控制测量井田一翼长度大于等5km,每隔1.5~2.0km加测一条陀螺边,可达到±7″的精度,但对超大型井下导线结点网加测陀螺边的数量和位置问题,并没有明确的研究意见。本文根据仙泉矿区实际情况和现代先进测量仪器的高精度以及合理数据处理方法,在相关测量规程的框架下,对仙泉矿区提出合理的井下导线测量方案和数据处理方法[8]。
1 测区位置概况
山西晋煤集团长治仙泉煤业有限公司位于长治县城东南6.5km处的北仙泉村村东、南仙泉村村北,距矿井西部边界4km有长治陵川公路通过,西南方向距沙峪西池乡乡级公路1km,向北20km至长治市与207、208、309国道及太焦线、邯长线铁路相接,交通较为方便。井田呈不规则多边形,南北最长4.577km,东西最宽3.105km,井田面积为9.2231km2。矿区位于沁水煤田东部地区边缘,潞安煤炭国家规划矿区外东南角,长治南北普查区东南部边缘。
2 井下导线网设计
平面控制资料和高程控制资料有矿区近井点控制网,近井点控制网是利用长治县国土局提供的控制点作为起算数据,并与仙泉煤业的近井点构成14点的GPS(D级)控制网[9,10],并且GPS基线的解算和控制网的平差精度完全符合《全球定位系统(GPS)测量规范》(GB/T 18314—2001),这些数据皆完整可靠,可以直接使用,因此本次设计任务便不需要做地面控制设计,只进行井下导线网设计。
2.1 导线方案
井下导线网设计是井下导线测量的施测依据,也同样是井下高效和安全生产的前提,根据已有资料信息分析,本次井下导线网设计方案可分为三种,采用何种方案是多方面因素决定的,不同的方案将产生不一样的导线网精度,同时也会依据人力、物力、财力方面的需求,在符合相关规程要求的限差之内,分析计算选出最佳方案。
2.1.1 方案一:闭合导线
所谓闭合导线就是导线测量的一种,根据一条已知边,测量若干个夹角和边长后又闭合到已知边的导线测量方法,然后通过平差后,可计算得到经过的未知点的平面坐标。这种导线终点有已知边检测,可以很好的控制整个导线的精度。根据已有资料和巷道的实际分布,绘制出闭合导线分布图,如图1所示。
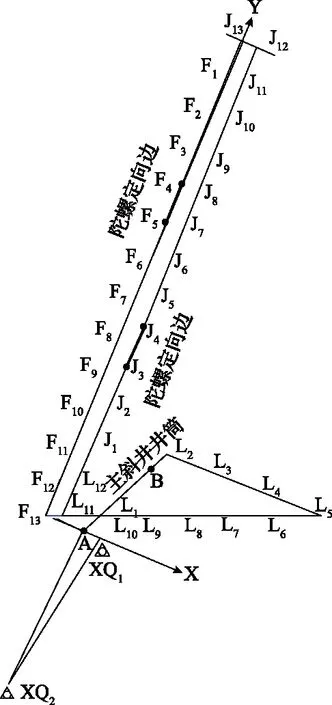
图1 闭合导线分布图
由图1可知,方案一导线设计从主斜井井口两个已知近井控制点XQ1-XQ2构成的已知边开始布设,经过A-L1-B-L2-L3-L4-L5-L6-L7-L8-L9-L10-L11-L12-J1-J2-J3-J4-J5-J6-J7-J8-J9-J10-J11-J12-J13-F1-F2-F3-F4-F5-F6-F7-F8-F9-F10-F11-F12-F13-L11-L10-L9-L8-L7-L6-L5-L4-L3-L2-B-L1-A闭合到XQ2-XQ1,其中,L11-L10-L9-L8-L7-L6-L5-L4-L3-L2-B-L1-A-XQ2-XQ1为重复测段。在该设计方案中,J3-J4和F4-F5加测了陀螺边。
2.1.2 方案二:方向附和导线
所谓方向附合导线就是从已知控制点出发,往外延伸布设未知点,附和合到一条已知方向的陀螺边。根据已有资料和巷道的实际分布,绘制出方向附和导线分布图,如图2所示。

图2 方向附和导线分布图
方案二与方案一相比,不同之处在于导线布设到F13就为止,没有重复测段L11-L10-L9-L8-L7-L6-L5-L4-L3-L2-B-L1-A-XQ2-XQ1,同时J3-J4、F4-F5和支导线终端F12-F13加测了陀螺边。
2.1.3 方案三:附合导线
所谓附合导线是由一个已知控制点或控制边出发开始测量,往外延伸经过若干未知点,到达另一个已知点或已知边,然后通过平差计算得到未知点平面坐标的导线测量。根据对已有资料和巷道图的分析,发现在副斜井井口附近有两个已知控制点XQ4和XQ5,因此绘制出附合导线分布图,如图3所示。

图3 附合导线分布图
从方案三中可以看出,导线的终边为已知控制边,可以有效的控制并检核导线误差。其中J3-J4、F4-F5、Z9-Z10、Z23-Z24加测了陀螺边。
2.2 加测陀螺边
矿区井下测量有其特殊性,在布设井下导线时,导线是以支导线的形式前进的,支导线由于没有已知边进行约束,会导致误差逐渐累积,随着导线延伸的越来越长,其精度也会不断下降,最后可能其精度超出限差从而引发测量事故。因此,为了控制方向误差累计,在导线延伸到一定距离对其加测陀螺边是目前为止最优的解决方案,陀螺经纬仪定向限差要求见表1。

表1 陀螺经纬仪定向限差
规程中要求在井下测量工程中,只要测段距离达到1.5~2.0km,就必须对待定边进行加测陀螺边来提高测角精度。
1)对于方案一,从A点到J3点,井下导线长度以达到约1.5km,所以需在J3-J4加测陀螺边;而从J3点到F4点,井下导线长度达到了约1.2km,虽然超过1.5km,但是在F4-F5段将开采一段大致向东的工作面,以及该巷道以后将继续向北延伸,为了方便以后向掘进巷道布设导线,保证和控制待开采巷道导线的精度,因此在F4-F5段加测陀螺边;在方案一中,虽然导线点F5闭合到已知点的距离已超过1.5km,因为L11-L10-L9-L8-L7-L6-L5-L4-L3-L2-B-L1-A-XQ2-XQ1为重复测段 ,第二次重复测量时可以参照第一次测量时的成果,对导线误差进行控制。
2)对于方案二,由于导线没有闭合,从点F5到点F13为支导线,支导线终边必须加测陀螺边以控制整个导线的精度,所以在方案一的两条陀螺边的基础上加测了陀螺边F12-F13。
3)对于方案三,导线从已知边XQ1-XQ2附合到已知边XQ5-XQ4,但是从导线点F5到副斜井已知边的导线长度约3.6km,所以需要在方案一的基础上再加测两条陀螺边,加测的两条陀螺边均匀分布,分别是Z9-Z10,Z23-Z24。
3 数据处理
3.1 陀螺仪定向导线测角平差
对于测绘行业而言,数据处理是一项十分重要的工作,关系到测量成果的质量和可靠性。由于井下控制测量是随着巷道的掘进而测量的,因此,井下导线往往不是一次全面布网,而是随巷道掘进而逐步敷设。这种情况下,数据处理人员通常以单导线平差的方法来处理所测数据,将其处理结果作为最终作业成果。
1)根据测量的数据解算AB与CD的定向中误差mα1与mα2以及井下导线的量角中误差mβ,其中:

2)根据条件观测平差原理可以得出导线角改正数条件方程式,所以,井下导线角度闭合差为:
α1-α2+β1+β2+…+βn-n180°=W(2)
则改正数的条件方程式即为:
υα1-υα2+υβ1+υβ2+…+υβn+W=0(3)
式中,υα1、υα2分别为陀螺定向边坐标方位角α1、α2的改正数;υβi为导线中角度βi的改正数;n为导线中角度个数。
3)确定定向边方位角和角度的权,当等精度观测时,设导线量角的中误差mβ为单位权中误差μ。即pβ=1,因此陀螺定向边的方位角权为:
得出权倒数为:
4)联合组成法方程式为:
NK+W=0
N=n+q1+q2(6)
解得:
5)通过计算求得井下导线测角的改正数为:
υβ1=υβ2=…=υβn=K(8)
定向边AB的坐标方位角α1的改正数是:
υα1=q1K(9)
定向边CD的坐标方位角α2的改正数是:
υα2=-q2K(10)
将各个角度的改正数带入测角中,就可以求得井下各个导线角的最或然值。
3.2 导线方案的选择
本次共设计了三种井下导线测量方案,但是最终施测的方案只能有一种,因此,根据三种方案导线点的点位误差以及其他误差,选择本次井下导线布设的方案。
3.2.1 点位误差估算
1)在方案一导线设计图中,XQ1-J4为方向附和导线,其余为加测陀螺定向边的导线,最终形成闭合导线,所以可以计算出导线终点XQ1的点位误差。求出方案一中三段导线XQ2-J4、J4-F5、F5-XQ1的重心O1、O2、O3坐标如下:
在图2的基础上,以点F13为原点,建立导线重心图,其中重心O1、O2、O3也分布在上面,如图4所示。

图4 导线重心图
通过该图计算导线与X轴之间的夹角以及η、ζ,各导线点至本段导线重心O的距离在Y轴和X轴上的投影长度见表2。
根据表2中数据及其相关公式计算得出如下结果:
因为方案一导线全长约6387m,导线全长相对闭合差为1.14×10-5且远小于1/8000,所以方案一符合相关规程要求。
2)在方案二导线设计图中,F12-F13加测陀螺边作为最终边,形成方向附合导线。根据方案一的处理方法,计算得第三段导线F5-F13的重心O3与F9重合。
根据表2的数据以及相关公式得出以下结果:
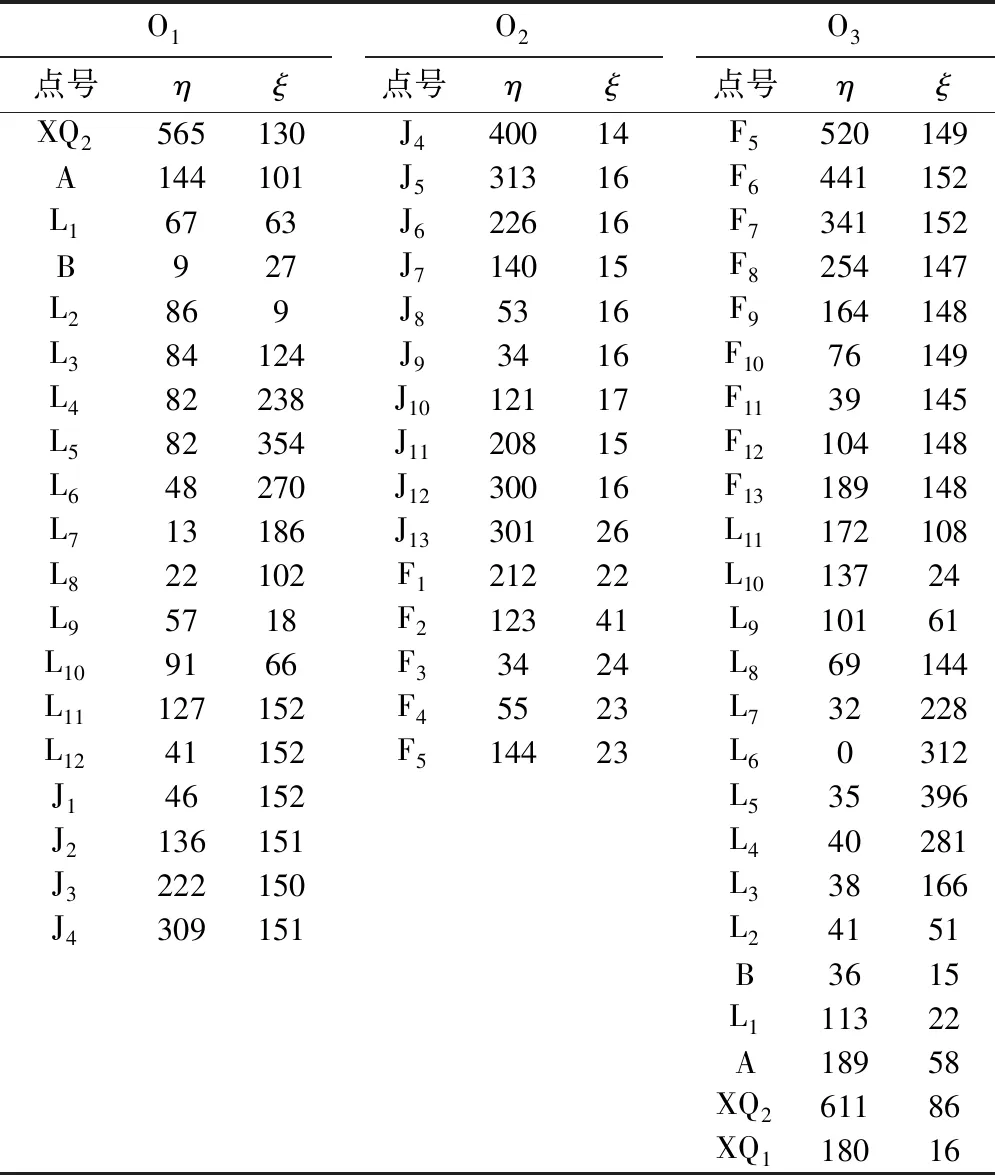
表2 各导线点至本段导线重心O的距离在 Y轴和X轴上的投影长度
因为方案二导线全长约4336m,导线全长相对闭合差为1.36×10-5且小于1/8000,所以方案二符合相关规程要求。
3)在方案3导线设计图中,加测陀螺边将导线分为5段,其重心分别为O1、O2、O3、O4、O5。因为该方案导线长度过长,各导线点至本段导线重心O的距离在Y轴和X轴上的投影长度数据太多,不方便在本篇设计中制成表格。根据方案一和方案二的计算原理,得出以下结果:
因为方案三导线全长约7800m,导线全长相对闭合差为1.17×10-5且小于1/8000,所以方案三符合相关规程要求。
3.2.2 最优方案选择
1)方案一与方案二相比,方案一的导线全长相对闭合差比方案二小,虽然方案一重复观测了L11-L10-L9-L8-L7-L6-L5-L4-L3-L2-B-L1-A-XQ2-XQ1这条边,但是重复观测可以进行精度验证,并且方案一相比较方案二少观测了一条陀螺边,相比较而言,方案一更适合实际工程应用。
2)方案一与方案三相比,方案一的精度更高,同时,方案三的导线过于长而且加测了四条陀螺边,这会大大地增加测量成本。
综合分析,方案一为最佳的导线方案设计。
4 结 论
1)依据仙泉矿井下巷道图和已有控制点,绘制了三种井下导线布设方案图,并给出相关的测量所需要的仪器及其精度;并根据《煤矿测量规程》所要求的限差,计算得出了三种方案的终点点位估算误差,且都符合要求,为仙泉矿井下导线施测提供了理论依据。
2)介绍了陀螺定向的具体过程以及相关限差要求,并根据加测陀螺边的要求,给出了三种方案所要加测陀螺边的位置及数量。根据对三种方案的误差比较以及成本预估,选出了最佳方案一,并预计了该方案所需要的费用,为施测前期的准备工作提供了基础。
3)对选出的最佳方案进行分析,提出了合理、可靠、严谨的测量数据平差方法。
