差分GPS数据对无人机空三精度影响的探讨
2019-05-27刘竹均
刘竹均 王 义
(中铁二院工程集团有限责任公司,四川成都 610083)
1 概述
无人机航空摄影具有灵活性强,现势性高,响应快速,受天气条件、空域管制影响较小等特点。近年来,该技术在高速铁路航空摄影大比例制图、抢险应急制图、大比例工点制图等项目中发挥了重要的作用。无人机航摄系统搭载的多为非量测相机,致使其所航摄影像基线短、像幅小、畸变大,往往需要野外布设大量的地面控制点进行空三加密,极大地制约了无人机技术在大比例制图中的生产效率。
差分GPS辅助空中三角测量:利用与航摄仪相连接的机载GPS接收机和设在地面上的一个或多个基准站GPS接收机同步观测[1],采用GPS载波相位测量差分定位技术,获取航摄仪曝光时刻摄站的三维坐标。将差分后的摄站三维坐标作为观测值,引入区域网进行空三加密,可辅助确定像片方位元素[2]。王红莲[3]、郑亮本[4]等对差分GPS辅助无人机空中三角测量技术进行了试验和探讨,试验数据表明,采用差分GPS辅助无人机影像空三,能在保证精度的前提下减少控制点布设数量。以往的差分GPS辅助空三技术是将GPS数据用于自动连接点的提取和相对定向,其目的是增强区域网的内部连接精度。以下研究将高精度的像主点差分GPS数据与外业控制点共同作为区域网平差的输入值,辅助区域网无外控区域的绝对定向,以提升整网的空三加密精度。以此为出发点,探索加入和不加入像主点差分GPS数据对无人机影像空三加密精度的影响。
2 项目情况介绍
以某高铁一个测区为试验区,该试验区位于丘陵地带,高程为600~700 m,地形等级为Ⅱ级[5]。试验区长度约为10 km,宽度约为6 km(长方形),共布设16条航线,无人机航高约500 m,共拍摄无人机影像999张,布设地面控制点73个;航摄仪参数见表1。

表1 航摄仪参数
采用YS-D1无人机差分GPS系统获取无人机航飞影像的像主点差分GPS坐标数据。YS-D1是一套完整的高精度机载差分系统,可在高动态环境下采集数据并精确解算。其精度技术指标见表2。

表2 YS-D1差分系统的精度技术指标
3 无人机空三加密流程
采用inpho Match-AT和Pix4DMapper软件相结合的方式,进行无人机影像的数据处理和空三加密数据处理。inpho Match-AT是一款主流的空三加密软件,具有较高的自动化处理能力,能够自动匹配大量、高精度的连接点,减少人工参与,提高工作效率。然而无人机原始影像畸变较大,且飞行姿态不稳定,IMU精度较低,原始的无人机数据无法直接为inpho所用。因此,需要对无人机数据进行预处理工作。Pix4DMapper是当今市场领先的集全自动、快速、高精度为一体的无人机影像数据处理软件,可自动、批量化地处理无人机原始影像数据,解算相机的畸变参数,生成畸变改正后的影像。无人机影像空三加密技术流程如图1所示。

图1 无人机影像空三加密流程
3.1 Pix4DMapper无人机影像预处理
采用Pix4DMapper软件进行无人机影像的预处理,一般要经过以下几个流程。
(1)GPS数据坐标转换
GPS数据的坐标系统为WGS84坐标(B,L)和大地高系统(H),而高速铁路航测制图的坐标系一般为独立分带的工程坐标系和正常高系统。因此,空三加密使用的像主点GPS数据应首先进行坐标和高程系统的转换处理,并将其经纬度坐标转换为成图所要求的工程坐标系统。
(2)测区工程建立
导入无人机原始影像和差分GPS数据,系统可自动识别航摄仪相机参数。
(3)区域网相对定向
利用差分GPS数据匹配像点坐标,进行区域网相对定向。
(4)成果输出
输出畸变改正后的影像,并导出外方位元素(包含线元素和角元素)。
3.2 inpho Match-AT无人机影像空三加密
利用inpho Match-AT软件进行无人机影像的空三加密,一般要经过以下几个步骤。
(1)测区工程建立
包括相机文件的设定、畸变改正后的无人机影像和外方位元素的导入、航线的创建编辑、控制点导入等。
(2)创建影像金字塔
建立金字塔影像可以提升像点匹配、平差计算等运算速度。金字塔影像也被用于影像浏览和漫游,对于经过Pix4DMapper畸变改正后的影像,影像格式为*.jpg(自带金字塔则无需建立金字塔影像)。
(3)自动提取连接点
利用Pix4D-Mapper输出的精度更高的外方位元素,使用inphoMatch-AT模块自动提取连接点,进行区域网相对定向。
(4)外业控制点量测
根据刺点示意图,量测控制点。
(5)区域网平差
根据量测的控制点坐标进行区域网平差,采用“外控点坐标单独平差”(下称“不带差分GPS平差”)和“加入差分GPS坐标与外控点坐标联合平差”(下称“带差分GPS平差”)两种平差方法,来分析差分GPS数据对区域网绝对定向和空三加密精度的影响;
(6)输出空三加密成果。
4 试验方案及精度统计
4.1 试验布点方案
设计了6种布点试验方案(如图2所示)。其中,没有参与区域网平差的外控点将被当作检查点用以评定空三加密精度,各布点方案使用的定向点和检查点数,如表3所示。
全测区6种布点试验方案如下。
(1)五点法:全测区共布设五个平高控制点,分别布设在测区的四角和中间位置。
(2)六点法:全测区沿测区周边共布设六个平高控制点。
(3)八点法:全测区沿测区周边共布设八个平高控制点。
(4)双五点法:全测区沿测区周边共布设六个平高控制点,测区中央布设四个平高控制点,控制点呈梅花状分布。
(5)九点法:全测区均匀布设九个平高控制点。
(6)十三点法:全测区共布设十三个平高控制点,控制点呈梅花状分布。

表3 各种布点试验方案对应的定向点和检查点数

图2 无人机影像布点方案示意(△为控制点,其余为检查点)
4.2 空三加密精度统计及结果分析
通过统计6种布点试验方案并采用两种区域网平差的方式(不带差分GPS和带差分GPS),来分析像主点差分GPS数据对无人机影像空三加密精度的提升效果,空三加密质量的评定以检查点点位和高程中误差为依据。中误差的计算公式为[5]
(1)

(2)
其中,检查点坐标误差Δi(i=X,Y,Z)为检查点的空三加密解算坐标与其外业实际测量坐标的较差,实际精度是由n个检查点的坐标误差Δi分别按照式(1)、式(2)计算,结果如表4所示。
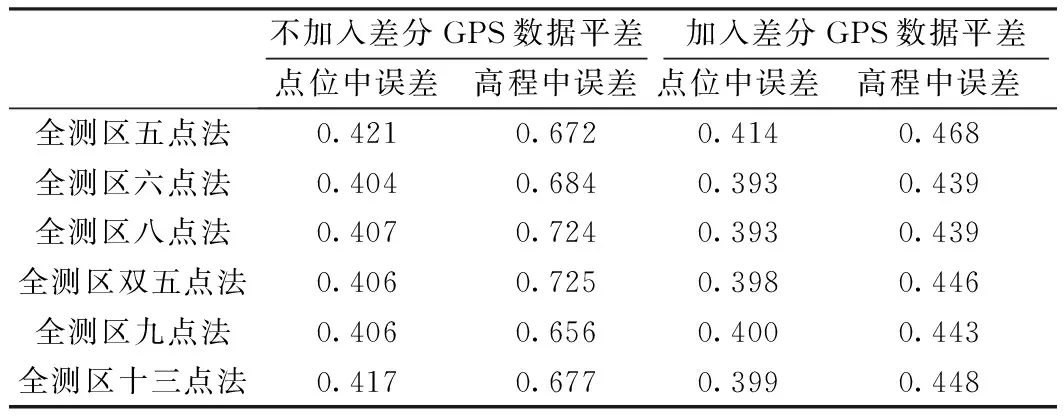
表4 无人机影像空三加密检查点精度评定结果统计 m

图3 无人机空三加密检查点精度评定(单位:m)
由表4和图3可以看出:
(1)在本试验区域,加入像主点差分GPS数据进行区域网平差,对区域网的高程精度有较大的提升,提升幅度达到0.2~0.3 m,说明较高精度的像主点差分GPS数据对区域网高程数据的绝对定向解算起到了良好的辅助作用,能够在没有控制点的区域辅助定向,提升区域网的高程精度;另一方面,是否加入像主点差分GPS数据对像点的平面精度影响不大。
以上试验数据表明,加入和不加入差分GPS数据进行区域网平差均能满足《TB 10050—2010铁路工程摄影测量规范》Ⅱ级地形1∶1 000空三加密点点位中误差不大于0.91 m的精度要求,但只有采用加入差分GPS数据进行区域网平差的方法才能满足规范中空三加密点高程中误差不大于0.5 m的精度要求[5]。
(2)在加入差分GPS数据进行区域网平差的结果中,各方案的像点平面精度均可达到0.4 m左右,差异不大;高程方面,除全测区八点法和全测区双五点法外,其他四种布点试验方案的精度相差不大,检查点高程中误差均在0.7m左右。在加入差分GPS数据进行区域网平差的方法中,六种方案像点平面精度几乎一致,没有太大的提升;高程方面,五点法的高程精度较其他五种布点试验方案稍显逊色,但其高程精度也能达到0.45 m左右。
以上计算试验数据表明,在进行无人机影像空三加密的过程中,布点方案对空三加密精度的影响远小于航飞过程加入像主点差分GPS数据对空三加密精度的影响。
5 结论
采用Pix4DMapper软件对无人机影像进行预处理,采用inpho Match-AT软件进行无人机影像空三加密的数据处理。研究了加入像主点差分GPS数据和不同外控点布设方案对无人机影像空三加密精度的影响。试验结果表明,加入像主点差分GPS坐标和外控点坐标联合进行区域网平差较不加入差分GPS数据平差,区域网高程精度可以提升0.2~0.3 m,且能满足《TB 10050—2010铁路工程摄影测量规范》Ⅱ级地形1∶1 000空三加密点点位中误差不大于0.91 m,高程中误差不大于0.5 m的空三精度要求;而在加入差分GPS数据进行无人机影像空三加密的基础上,外业控制点的布设方案对空三加密精度的影响较小。
在高山、密林区域,外业布设控制点困难程度较高,可供选择的刺点地物也相对较少,若能使用差分GPS坐标联合外业控制点坐标进行区域网联合平差的空三加密方法,可适量减少区域网刺点困难区域的外控点数量,在区域网的四周边界使用全测区六点法、八点法布设控制点,即可保证空三加密精度。
