园林自动喷药机器人杂草识别与导航方法探究
2019-05-27秦富贞曹爱霞
秦富贞,曹爱霞
(青岛黄海学院,山东 青岛 266427)
0 引言
园林中的花草树木是园林自然景观的基础,对于园林功能的发挥至关重要。园林杂草通常与景观植物伴随生长,种类繁多,生长迅速,具有较强的生命力。这些杂草不仅有双子叶的阔叶类杂草,也有单子叶的禾本科和莎草科杂草,滋生后与景观植物争夺养分和生长空间,在防控不力的情况下能够很快发展为优势种群,甚至引起原有的自然景观早衰和退化。例如,单株野燕麦的根系可以达到2m的长度,形成1kg干物质所消耗营养和水分量是惊人的。另外,园林杂草还是很多病虫害的中间寄主和越冬场所,并为其提供传播条件,加重景观植物的感染程度。因此,在园林自然景观的日常维护中,需要投入大量的成本对杂草进行清除和控制。
在杂草发生的早期,危害面积较小,可以采用传统的人工方式拔出;后期的杂草生长旺盛,危害面积大,人工除草的效率和彻底程度无法满足要求,则需要喷洒除草剂进行清除。除草剂一般由人工采用简易的喷雾装置喷洒,劳动强度大,人员健康会受到农药的危害。在自动控制和信息技术的基础上,人们研制出各种用途的农业机器人,大幅提高了农业生产能力。喷药机器人是农业机器人的一种,最早由日本开发,安装各种传感器和喷药控制装置,可以高效、准确地完成喷药作业[1]。我国虽然起步较晚,也设计出了多种农业喷药机器人,主要应用在果园和作物上。邹大军等设计了喷药机器人的行走机构,具有良好的性能,能够满足蓝莓喷药机器人的行走要求[2]。孙雪等在喷药机器人上安装伸缩喷药杆,重新设计行走和升降装置,实现了对果园的高效自动化喷药作业[3]。曹玮鑫等设计了一种远程遥控操作的智能喷药机器人,试验证实其拥有优良的行走性能和作业速度[4]。
在喷药机器人的诸多性能中,精准喷药和自主导航是较为重要的两项内容。普通的喷药方式比较粗放,对防治的目标没有选择性,不利于节约成本,还会引起环境污染。对此,人们开发出精准喷药技术,即根据杂草的位置和密度调整药液喷洒时机和剂量。精准喷药在保证防治效果的前提下,可以减少农药用量,符合现代农业的发展趋势[5]。对杂草的识别是精准喷药的基础,目前已经有多种识别技术与喷药机器人结合。纪良文等设计了基于超声波测距的辅助视觉系统,可以为喷药机器人提供农作物的位置和形状等信息[6]。周恩浩等以单片机和光敏电阻为部件,组成简易的视觉识别系统,为提高喷药机器人的农药利用率提供了支持[7]。与上述的两种技术相比,计算机视觉技术采集的图像信息量大,分析内容全面,能够根据形状、颜色和纹理等特征将杂草准确识别出来[8]。郭亭亭等开发了具有计算机视觉分析功能的喷药机器人,能够正确识别作物和杂草,并根据杂草面积和分布状况进行精准喷药[9]。
喷药机器人的自主导航有利于提高对环境的适应能力,是机器人自动化程度的重要体现。传统的导航方式是在作业区域中放置传感器或者电缆,利用其产生的电磁场信号引导机器人行走[10-11]。计算机视觉可以采集喷药机器人前方的图像,分析识别路径后规划形成行走路线,从而实现自主导航[12-14]。基于计算机视觉的机器人导航同样具有较高的精度,无需放置传感器和电缆,是比较实用的导航方法。
本文在园林喷药机器人上安装计算机视觉设备,拍摄图像后根据颜色和形状特征识别杂草,辅助机器人实现精准喷药;同时,根据颜色特征识别路径,规划获得行走路线,辅助机器人实现自主导航;最后,通过试验评价上述方法的实际应用效果,以期提高园林喷药机器人的智能化和自动化水平。
1 总体设计
喷药机器人为AS-R型,是一个四轮移动平台,搭载视觉模块、主控模块、喷药模块和行走装置等设备,具有自主供电和行走的能力。视觉模块安装在机器人的上方,拍摄图像后通过图像采集卡形成数字信号传输给主控模块进行分析处理。主控模块是喷药机器人的控制核心,由电池提供电源,可以接受上位机发来的无线通讯信号。视觉图像的分析处理由主控模块完成,并将杂草和路径识别的结果转化为指令发送给喷药模块和行走装置。喷药模块根据杂草识别的结果适时开启实现精准喷药,行走装置根据规划的路线进行转向实现自主导航,如图1所示。

图1 自动喷药机器人的总体设计
2 组成部分
视觉模块由尼康COOLPIX P60型数码相机和天创UB570型图像采集卡组成。相机具有800万像素,安装在机器人的前部上方,进行了防抖动处理。相机光轴与竖直方向呈60°角,俯视拍摄生成JPEG格式的图像,然后经过图像采集卡转换为数字信号,以便主控模块进行视觉分析。主控模块主体是三星S3C2440型处理器,主要功能是接收上位机发来的无线控制信号和视觉模块采集的图像并进行分析; 同时,根据图像分析结果生成控制指令,发送给喷药模块和行走装置。该处理器为32位CMOS微控制器,主频速率达400MHz,可满足各种功能的要求。主控模块中用于图像处理的是TI公司的TMS320DM642型芯片,属于高性能的定点DSP,具有良好的稳定性和兼容性。
喷药模块包括药液箱、隔膜泵、离心喷头和喷药控制器。隔膜泵的功能是将药液从药液箱输送到喷头,每个喷头由单个电磁阀控制,通过接受主控模块发来的脉冲宽度调制开启。机器人前方的左右两边各有1套喷药装置,每套装置包含4个喷头。喷药控制器可以控制各个喷头开启的时机和时间长度,实现对相应区域的精准喷药。喷药机器人采用四轮行走的方式,行车控制器用于接收主控模块发来的规划路线,行驶方向由角度传感器提供,液压阀控制车轮的偏转实现自主导航。
3 计算机视觉分析
喷药机器人在行走的过程中拍摄园林图像,相机与拍摄目标之间存在相对运动,因此图像含有不同程度的噪音。图像噪音会降低图像的清晰度,影响对杂草和路径的识别。本文采用3×3的中值滤波法对图像进行预处理,以便去除噪音。预处理后得到的原始图像包含景观植物、杂草和道路,景观植物和杂草为绿色,道路为灰白色。景观植物的种类有棕榈和海桐,杂草的种类为狗尾草和马唐(如图2所示)。

图2 园林的原始图像
针对相机俯视角造成的不同距离上相同大小物体对应像素点数不同的问题,本文参考纪寿文等的方法矫正图像的畸变[15]。
合适的颜色空间对于彩色图像的分割效果至关重要,这里根据园林图像受光照强度影响较明显的特点,选用HSI模型颜色空间的亮度I分量来对图像进行灰度化处理。灰度化后的图像黑白效果更加明显,颜色差异得到了增加,有助于目标区域的轮廓提取,如图3所示。

图3 园林的灰度化图像
杂草与景观植物的颜色接近,但是在叶片形态上存在差异,因此选用长宽比和圆度两个特征进行杂草识别。长宽比是最小外接矩形的长度与宽度的比例,圆度是面积与周长平方的比值,它们在图像旋转、平移和缩放处理过程中稳定性较好。道路为灰白色,与背景的差异明显,因此根据颜色特征提取。根据图片的特征,选择阈值分割方法来识别杂草和道路。目标的形状和颜色特征受光照强度影响不大,将I分量的效果图与灰度图分别进行最大类间方差分析,再进行图像二值化,得到分割形状特征和颜色特征的阈值。杂草和道路的识别结果如图4所示。其中,灰色部分为景观植物,黑色部分为杂草,白色部分为道路。
获得杂草的分布情况后,计算各个区域的杂草覆盖率,据此喷洒相应的药液剂量,从而实现精准喷药。采用Canny算子检测道路的边缘,然后提取相同水平线上的两个边缘像素点的中心位置,整理得到一条连续的曲线,即喷药机器人的行驶路线,如图5所示。

图4 杂草和道路的识别

图5 喷药机器人的行驶路线
4 试验结果与分析
在园林中选择5条20m长的路段,利用喷药机器人进行喷药作业。每个路段上随机选取10个点作为样本,统计机器人对杂草的识别率、误识率和路线偏离距离,评价杂草识别和导航方法的应用效果。杂草的识别率为被识别的杂草占所有杂草的比例,误识率为被识别为杂草的景观植物占被识别植物的比例,路线偏离距离为喷药机器人前轮中心与规划路线之间的距离。
喷药机器人对园林杂草的识别率为84.6%~90.5%,误识率为6.9%~9.5%,具有较高的杂草识别精度;路线偏离距离为4.4~7.3cm,与规划的路线基本吻合,能够实现自主导航。机器人处理单幅图像的过程耗时0.1s,可以满足实际作业的需求。试验结果如表1所示。
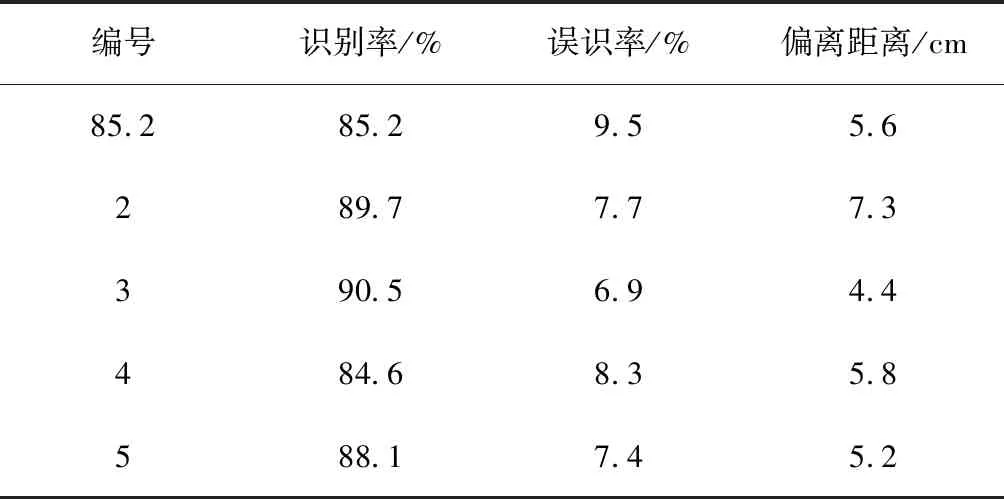
表1 杂草识别和导航方法的应用效果
5 结论
将计算机视觉设备安装到园林喷药机器人上,拍摄图像后根据颜色和形状特征识别杂草,根据颜色特征识别路径,规划获得行走路线。试验结果表明:喷药机器人对园林杂草的识别率为84.6%~90.5%,误识率为6.9%~9.5%,具有较高的杂草识别精度;实际行走路线与规划的路线基本吻合,能够实现自主导航;机器人处理单幅图像仅耗时0.1s,可以满足实际作业的需求,智能化和自动化水平得到了提高。
