四旋翼无人机飞控系统的研究与实现
2019-05-27
(嘉应学院计算机学院, 嘉应学院数学学院, 广东 梅州 514015)
0 引言
四旋翼无人机具有成本低、体型小、强灵活性、容错性和平衡能力强等优点,是各种无人机中最具代表性的模型。广泛地应用于军事、警力、农业、地质、气象、物流、抢险等领域。为此,四旋翼无人机一直都是各国研究的热点[1]。国外研究起步较早,如美国、以色列、俄罗斯、日本等国。其中比较具有代表性的如:①、美国的斯坦福大学(Stanford University)研制的载重量较大,适合远距离飞行STARMAC I代和II代四旋翼无人机系统[2];②、美国的宾夕法尼亚州立大学(The Pennsylvania State University)研制的具有视觉定位、可发射100 Hz的精度达到毫米级的位置信号的四旋翼无人机系统[3];③、日本千叶大学(Chiba University)研制的具有造价低、能进行室外轨迹跟踪、适合于民用的四旋翼无人机平台[4]等。20世纪70年代,我国开始研制无人机,除了军用,最具代表性的有大疆科技、派诺特贸易和深圳一电等公司的无人机[5-6]。
四旋翼无人机系统是一个非线性、多变量、多维度、高度耦合和欠驱动的系统。为了有效控制好四旋翼无人机系统,需要建立正确的数学动力模型来协调好各个模块形成一个有机的飞行体系,实现其在各种状态下的稳定飞行。为此,本文将其作为研究对象,构建四旋翼无人机并实现其以较优的性能飞行。
1 四旋翼无人机动力学模型及理论分析
通过利用运动学关系来实现四旋翼无人机的飞行,为此,建立两个相关动力坐标系,分别为实体坐标系H和运动惯性坐标系T(采用NED方向),其中实体坐标系H的原点选在飞行器的重心位置,运动惯性坐标系T的原点选在地面。用{xb,yb,zb}分别表示实体坐标系H各个轴正方向上的单位向量,而{e1,e2,e3}分别表示运动惯性坐标系T各个轴正方向上的单位向量,如图1所示。
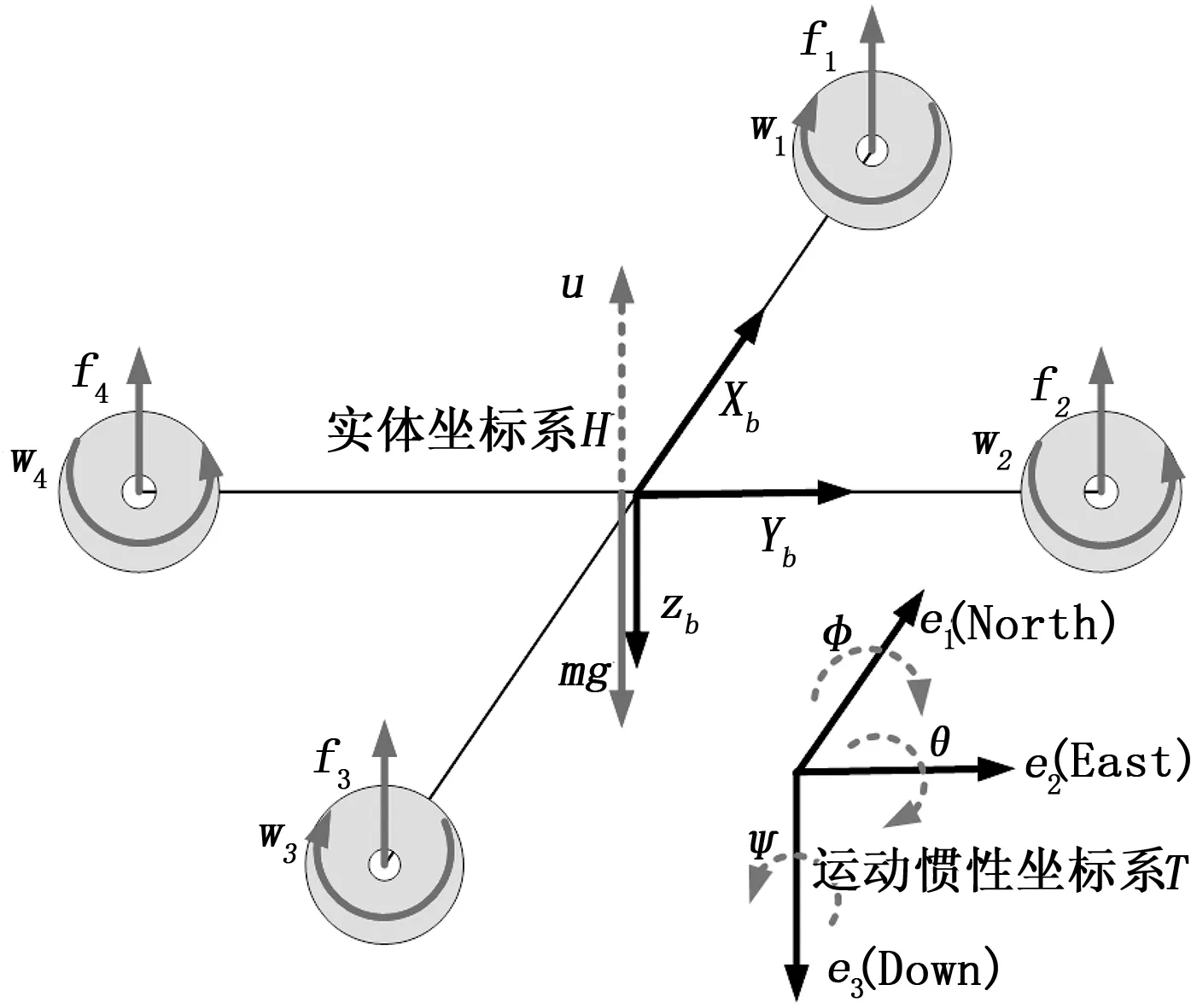
图1 四旋翼无人机动力模型图
通过动力坐标系可以实现四旋翼无人机在空间内飞行时的位置和姿态的定义,等同于刚体在三维空间内的位置和姿态的定位。四旋翼无人机具有6个自由度,包括3个角为滚转角φ、俯仰角θ、偏航角ψ和3个表示位置的量x、y、z。
一个质量为m∈R惯性为J∈R3×3的刚性物体如果受到力矩为τ∈R3并且外力为Fext∈R3的作用时的动力方程可以用牛顿-欧拉等式表示为[7-8]:

(1)
其中:V=(u,v,w)和Ω=(p,q,r)分别表示在实体坐标系H内的线速度和角速度。平移力Fext包括重力、主要的推力和其它物体力的组合。
使用欧拉角参数化和航空学公约“ZYX”,无人机身在空间中的定位可以通过一个从实体坐标系H到运动惯性坐标系T的旋转矩阵R来表示,其中R∈SO3如下所示:
R=Rψ·Rθ·Rφ=

(2)
其中:η=(φ,θ,ψ)表示三个欧拉角的向量,s和c分别是sin(·)和cos(·)的缩写。通过在实体坐标系和惯性坐标系之间考虑这种转换,可以从其它的力中分离出重力,在运动惯性坐标系T中的转换动力模型如下:

(3)

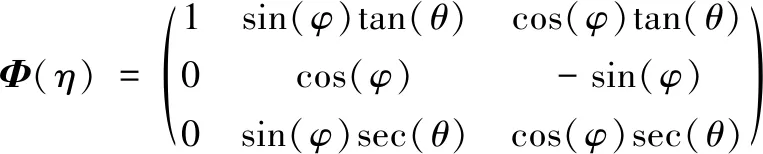
(4)
求出它的逆矩阵记为Ψ(η)=Φ-1(η)如下所示:

(5)
从而可以求得惯性矩阵表达式记为:M(η)=Ψ-1(η)TJΨ(η),其中J=diag(J1,J2,J3)∈R3×3是四旋翼无人机的转动惯量矩阵,因而进一步可以得出:
M(η)=
(6)
(7)
最后可以得出四旋翼无人机的非线性模型如下所示:
(8)
基于非线性模型的特点,首先,可以将其分解为两个子系统,子系统之间通过非线性耦合项连接;其次,设计实现位置和姿态子系统控制器。对式(8)中的第二个表达式进行反馈线性化,可得:
(9)

(10)
对非线性动力模型式(9)进行变换,可以得出两个由一个非线性项Δ(u,ηd,eη)耦合在一起的线性子系统如下所示:
(11)
其中: 向量H(ηd,eη)∈R6为动态逆误差,而A1∈R6×6、A2∈R6×6、B1∈R6×3和B2∈R6×3都为矩阵如下所示:
(12)
在式(11)中μ∈R3为一个虚拟的控制向量,定义为:
μ=fμ(u,φd,θd,ψd)=
(13)
其中:fμ(·):R3→R3为连续可逆函数。通过式(13)可以得到虚拟控制向量μ的各分量表达式如下所示:
(14)
然后再根据这一向量可以计算出跟踪轨迹时无人机飞行的姿态参考角度,即通过式(14)可以得出:
(15)

(16)
其中:Kξ∈R6×3,Kη∈R6×3,将式(15)代入四旋翼无人机动力学模型式(11)中,可以得出闭环控制系统的动力方程如下所示:
(17)
其中:Aξ=A1-B1Kξ,Aη=A1-B1Kη。通过改变Kξ和Kη的参数值可以使Aξ和Aη满足Hurwitz矩阵,从而达到闭环系统稳定的目的。其中Δ(eξ,eη)可以看作位置环子系统的一个扰动项,可以证明当存在这一项的情况下,以式(17)为闭环的系统仍然可以保持全局渐进的稳定性从而实现控制的目的。
2 硬件设计和实现
四旋翼无人机的主要构成部件及特征描述如表1所示:
为了实现无人机的控制和成功飞行,进行了详细调试和反复的实验,实验结果及分析具体如下:
无人机机架设计和实现——实验1 机架对于无人机的装载和成功飞行起到了非常大的作用,必须精心设计并反复调试,如设计几何模式、大小比例、选择材料、数学建模和力学分析、机架组装等。经过反复比较测试,用轻巧又牢固的碳纤维管构建机架,其中3条3K斜纹6*4*1000 mm型作为主机主架,3条5*3.5 mm型作为副架固定四个电机,20条4*2*200 mm型用于机身结构的固定。构建的四旋翼无人机机身为“井”字形模型,架构如图2所示。

表1 四旋翼无人机主要部件列表
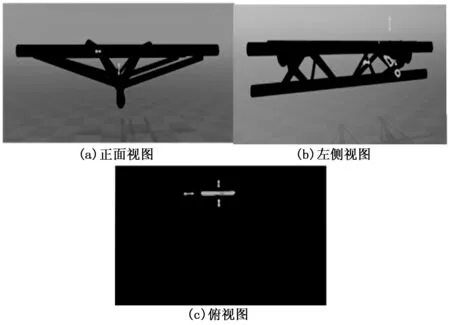
图2 无人机机架实物视图
动力系统(电机)设计和实现——实验2作为无人机的动力系统,电机的性能显得尤为重要。经过反复的实验证明,电机的选择要考虑多方面的因素:电调的参数、电池的型号、螺旋桨的大小、机身的重量、负载重量、无人机的模型和大小、线圈的粗细、发散热性和KV值(电压每增加一伏电机多转的圈数)等。否则可能出现无人机飞不起、发热大、耗电快、效率低及烧坏电机等情况。经过反复测试选用了朗宇2212-930 kV无刷交流电机,具有平衡性好、噪音小、驱动力大、散热低、耗电少和效率高等优点。
航空模型电子调速器(电调)设计和实现——实验3电调是一种无刷电子调速器,通过将直流电转化为一定功率的交流电,供给无刷电机使用,用PWM信号控制电机转速和转向。通过实验证明,要注意电调的型号、同电机的匹配以及信号线和电源线的连接等。否则将出现供电不足、电机不转、PWM信号控制错误或烧坏电调等情况。经过反复测试选用了好盈天行者SkyWaller 40A系列电调。
螺旋桨设计和实现——实验4 无人机的飞行依靠螺旋桨产生的推力。通过实验证明,螺旋桨的选择要考虑电机的参数、电池的型号、机身的重量、负载重量、无人机的模型和大小及KV值等条件。特别是越长的桨要配尽量低KV值的电机,桨越大,推力也大,力效就高。实验中测试过大、中、小,两旋翼、三旋翼、四旋翼等各种型号螺旋桨,最后选用重量轻强度大的1045型碳钎维螺旋桨,其中1045分别表示桨叶的长10英寸,螺距为45,该桨平衡性好,推力大,力效高。
电池设计和实现——实验5 电池作为无人机的供能装置,选择质量好的电池至关重要。通过实验证明,电池的选择要考虑电机的参数、电调的型号、无人机的轴数、飞行时间等条件。另外,还要考虑电池本身的电容、放电电压、放电能力、电芯数、电芯电压、充电器质量和是否过度充电或放电等因素,是否过度充电或放电可以通过安装警报器来提醒。否则将出现供电不足、电压过高、电池鼓包或电池损坏等情况。在此,选用参数为4200mah/30C、11.1 V/3S的花牌航模电池。
飞行控制器(飞控)设计和实现——实验6飞控,即飞行控制器,主要功能是保证飞机飞行时的平衡性。当前可使用的种类较多,有开源的如:KK、APM、MWC、PIX等;有商用的如:大疆的NAZA、A2、零度智控的双子星等。经过反复实验在此使用了QQ飞控,如图3所示,其具有闭源性、有自稳调整功能、价格适中、最多可支持六轴、可不用调参、简单易用等特点。使用时需要注意它与接收机的接线及调试。

图3 QQ飞行控制器实物图
遥控器设计和实现——实验7 遥控器是控制无人机飞行的指挥器,在此使用性价比较高的mc6经典型遥控器,7通道,配一个接收机,遥控距离大于600 m,为了更大距离的遥控可以购买信号增益器,遥控距离将达到几公里甚至更远。为了减少飞行的风险,可以预先买个模拟器(模拟操控飞机的一套硬件和软件),否则很难初次操控好无人机。
无人机软硬件集成设计和实现——实验8 完成了机架及所有部件的准备后,需要进行硬件的组装和软件的集成。为此,需要解决如下一些问题:①、电池位置的选择和固定;②、4个电调的位置的选择及如何协调工作而不互相干扰;③、电机的安装;④、飞控的安装;⑤、接收机的安装;⑥、电路的设计和电压的调节;⑦、各部件接口的连接;⑧、通过软件和遥控器实现对无人机的控制等。
3 飞行实验及分析
无人机飞行测试——实验9 无人机的飞行测试可能出现很多的意外情况,如:①、无人机起飞不了,不断往一边倒;②、虽然起飞了,但是摇晃不定;③、降落时很难停稳;④、飞行时猛然降落,导致无人机严重摔坏摔烂等。经过反复测试和调整,实现了无人机的成功飞行,稳定性高,灵敏性强,性能优越,如图4和图5所示。

图4 无人机低空飞行图 图5 无人机高空飞行图
4 总结与展望
本文通过数学建模进行动力学系统分析,研究实现了基于硬件和软件的四旋翼无人机飞控系统。首先、构建了四旋翼无人机动力学模型并进行理论分析;其次、设计了无人机机架,对各组成模块进行测试、分析和试验;再次、通过软硬件集成实现了无人机飞控系统并进行飞行测试;最后、实验结果表明,实现的无人机飞控系统取得了较好的飞控效果,整套系统飞行稳定性高,安全性强,飞行时长,适合高低空飞行,完全适合于无人机载物流、应急抢险等应用。
