基于中高空无人机的遥测中继系统研究
2019-05-27
(中国人民解放军 92941部队,辽宁 葫芦岛 125001)
0 引言
当前,对高速移动目标实施遥测任务的主要平台有遥测地面站、遥测船载站以及遥测机载站等。遥测地面站和遥测船载站受视距影响较大,对低空目标作用距离短,对于大航程低空目标的全程测量需要布置多个测控站采用接力方式进行保障,保障设备数量需求多,保障难度较大;采用遥测机载站方式,可以通过升空解决视距限制,提高对低空目标的跟踪距离,是对大航程低空目标跟踪的有效方式,但飞机建设、飞机改造和单次使用成本均较高,且遥测机载站接收到的数据不能实时处理,时效性较差。
固定翼无人机技术近年来发展迅速,在战场侦查、情报收集、远程打击中发挥了重要作用。可以作为遥测中继转发设备平台,通过和遥测地面站的搭配使用,提高对远程低空目标的遥测能力。使用中高空固定翼无人机进行遥测中继转发测量具有多个特点:一是覆盖范围广,中高空固定翼无人机一般可在7 000~14 000 m高度飞行,可以极大的提高遥测系统覆盖范围,可达近400公里。以2018年珠海航展的无人机为例,翼龙-II无人机飞行高度可达9 000 m,彩虹7无人机巡航高度可达9 000~13 000 m,云影无人机巡航高度可达14 000 m。二是留空时间长,固定翼无人机动辄几十个小时的连续飞行时间,远远超出了有人测控飞机的留空时间。翼龙-II无人机持续飞行时间可达20多小时,彩虹5无人机持续飞行时间可达40小时,云影无人机持续飞行时间可达6小时。三是与传统遥测机载站相比,中继转发测量系统体积小、重量轻、加装方便。传统测控飞机需要使用机舱内空间加装大量的测控装备、操控台和相关人员保障设施,遥测中继转发系统只需保留其中的天线、数据收发系统和配套保障系统即可,可以大大减小体积和重量。四是使用成本低、保障简单。相比较有人飞机的飞行条件和保障设施、无人飞机具有价格便宜、运行维护成本低、起降要求简单等优点。因此,固定翼无人机是一种性能优异、值得研究的新型遥测中继平台。五是可以与现有遥测地面站、遥测船载站配合接力使用,提高现有装备的使用效益。
本文第一部分简要介绍提出基于固定翼无人机的遥测中继转发系统背景,并简要分析了该技术的突出优点;第二部分对组成该系统的无人机平台系统、遥测中继系统、遥测地面站三大部分进行简要介绍;第三部分对该系统的总体设计技术、无人机平台选型设计、相控阵天线选择和设计、中继转发方式设计以及相控阵天线自跟踪技术等关键技术进行了初步分析,并简要给出了解决思路。
1 基于中高空无人机的遥测中继系统设计
无人机遥测中继系统主要由无人机平台、遥测中继设备、遥测地面站三大部分组成,工作示意图如图1所示。

图1 基于无人机的中继测控系统工作示意图
以下分别对三个部分进行简要介绍。
1.1 无人机平台
无人机平台包括无人机和地面控制设备。可以根据实际任务需求,选取市场现有的中高空无人机进行加改装实现。无人机作为遥测中继系统的飞行平台,需要具备一定重量的承载能力和任务载荷空间;需要为遥测中继系统提供供电保障、并为遥测中继系统提供实时位置、姿态信息;需要根据无人机外形进行遥测天线设计和加改装。
1.2 遥测中继系统
遥测中继设备安装在无人机平台,主要由遥测接收天线、遥测中继转发设备、遥测发射天线、航姿测量设备等组成。系统组成如图2所示。

图2 遥测中继系统组成示意图
1.2.1 遥测接收天线
用于接收导弹发出的遥测数据信号,采用相控阵天线方式,安装在飞机头部和下部,搭接完成对目标的遥测接收任务。根据无人机选型情况,无人机头部方向可以采用二维扫描相控阵加透波天线罩防方式,机体下部采用一维或者二维扫描相控阵天线方式实现。
1.2.2 遥测中继转发处理系统
由一体化综合射频系统组成,用于接收天线发送的射频信号,采用中频转发的方式将遥测信号转发为另一个频点进行发送。系统接收相控阵天线的遥测射频信号,进行低噪声放大、滤波、下变频、AGC放大和分路,其中一路依次完成射频(f1)放大、射频(f1)滤波、下变频、中频滤波、AGC放大、分路、中频滤波放大、上变频、射频(f2)滤波、放大,随后再经功率放大和收阻滤波输出给遥测发射天线。另一路信号进入数据记录器进行记录,可用于事后处理。
1.2.3 遥测发射天线。
用于将转发后的遥测信号重新向地面设备发送。天线可以采用全向微带天线方式,具有体积小、功率低、安装便捷的特点。
1.2.4 航姿测量设备。
航姿测量设备主要由捷联惯性测量组合和天线GNSS等组成,实时、高精度测量载体的位置、速度及姿态等,用于为系统跟踪目标提供支持。当无人机位置姿态测量数据精度满足遥测中继系统跟踪需求时,也可直接使用无人机的位置姿态信息数据。
1.3 遥测地面站
遥测地面站用于对中继遥测系统发送的目标信号进行接收处理。采用现有遥测地面站或遥测舰载站即可完成,不需重复建设。
2 基于中高空无人机的中继测控系统关键技术分析
基于中高空无人机的中继测控系统是一种新的测控系统实现方式,系统总体设计时,首先需要根据实际测量需求和作用距离分析确定无人机平台的飞行高度和速度,确定无人机平台的选型;然后根据无人机平台的飞行参数和空间、载荷、供电等能力,确定系统需达到的体积、重量、功耗等总体约束条件;进而完成系统总体设计,形成系统总体设计方案和无人机平台加装方案。
系统设计和实现时需要重点解决解决无人机选型及加改装、遥测接收天线设计、中继转发设计等若干关键技术,以下给出几个核心关键技术。
2.1 无人机平台选型
为了完成对目标的跟踪测量,需要根据测量需求合理确定无人机平台的飞行高度。设计时需要综合分析被跟踪目标的飞行高度、飞行距离和飞行速度,计算出需完成测量的任务包络,再根据测任务包络确定无人机的最低飞行高度和飞行速度,并最终完成无人机平台的选型。
国际通用遥测系统采用S频段微波信号,其作用距离主要受到无线电视距影响和链路电平的限制。无线电视距是指在发射和接受天线之间保持无障碍通信的最大距离,它与地球曲率、大气折射、地面反射、气候、地形等诸多因素有关。在没有地形地物遮挡的情况下,可以仅考虑地区曲率的影响进行计算,公式为:
(1)
式中,h1,h2分别为发射天线和接收天线的海拔高度,单位为m;R为视距距离,单位为km。根据公式可以得到被测目标与中继测量系统无线电视距和目标飞行高度的关系,也可得出中继测量系统与地面测控站之间的距离和飞行高度的关系。根据此公式,在确定测控目标的飞行包络,地面测控站拟选位置后,可以确定出最小视距,从而可以得出无人机平台的最低飞行高度。
无人机平台选型时,还需考虑无人机速度对测量的贡献率。无人机飞行速度越快,速度对跟踪距离的贡献率越大,跟踪目标的时间越长,当无人机飞行速度不小于被测目标飞行速度时,无人机可以进行全程伴随测量。
影响无人机平台的主要参数包括无人机飞行的高度、速度、载荷空间和重量等因素。这些参数主要由无人机的尺寸和发动机类型决定。可用于承载中继测控系统的中高空固定翼无人机主要采用活塞式航空发动机或燃气涡轮发动机。通常中高空长航时无人机采用活塞式航空发动机,具有燃油经济效能高、飞行时间长、飞行高度适中、飞行速度慢等特点。该类型无人机巡航高度一般为3 000~9 000 m,巡航速度一般为150~250 km/h。高空无人机一般采用燃气涡轮发动机,具有飞行时间长、飞行高度高、飞行速度快等特点。该类型无人机飞行巡航高度一般为10 000 m以上,巡航速度一般可达400~600 km/h。无人机尺寸和载荷能力为正比例关系,无人机体积越大,可承载的载荷空间和重量越大。一般中大型无人机的载荷能力可以达到150~400 kg,有些甚至可以达到1 000 kg。这里列举几型无人机供参考使用。
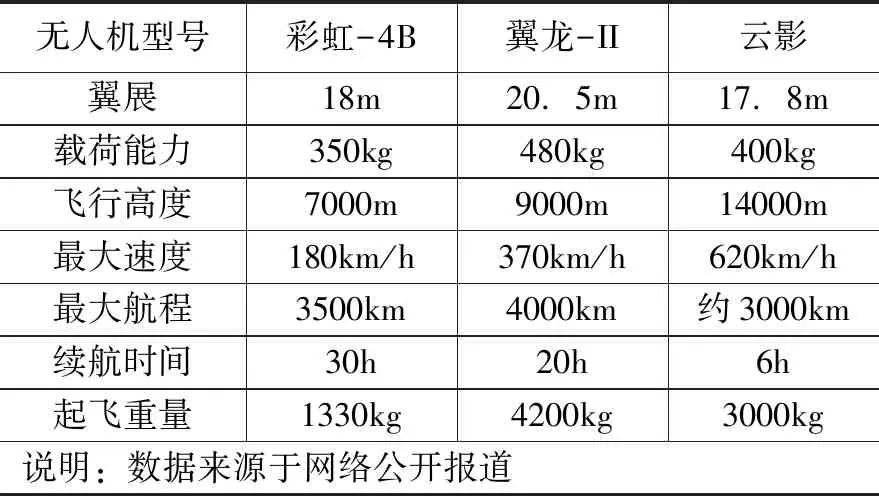
无人机型号彩虹-4B翼龙-II云影翼展18m20.5m17.8m载荷能力350kg480kg400kg飞行高度7000m9000m14000m最大速度180km/h370km/h620km/h最大航程3500km4000km约3000km续航时间30h20h6h起飞重量1330kg4200kg3000kg说明:数据来源于网络公开报道
2.2 相控阵天线选择设计和仿真分析
2.2.1 相控阵天线选择和设计
中继测控系统设计时,高增益天线是影响系统测控能力的核心指标、是影响系统体积和重量的核心内容,对无人机平台选型和加改装具有十分重要的意义。因此在完成无人机选型后,应优先进行系统天线的设计工作。
测控系统分析时,作用距离公式一般可以采用如下公式进行计算:
(2)

综合考虑系统使用的载荷约束、大扫描角度跟踪等要求,基于无人机平台的中继测控系统可以采用数字相控阵天线模式,在实现高增益的同时,采用相位控制的方式实现对测控目标的跟踪。无人机通常处于被跟踪目标上方,对飞行在其下方或者侧下方的目标进行跟踪。相控阵天线主要覆盖无人机前下方、下方或侧下方。为减少对无人机气动布局和飞行性能的影响,根据无人机机身形状和载荷空间,可以采取两种天线加装方式。一种是将天线加装在无人机内部,并在天线外部加装透波天线罩;另一种是将天线加装在无人机机身外部,采用共型天线直接贴装在无人机蒙皮上。通常无人机在头部设置有任务载荷空间,机身头部可以采用二维相控阵扫描天线+透波天线罩方式,完成对前下方范围的覆盖;无人机机身面积较大,可以在无人机机身下方和侧下方采用与机身共型的一维相控阵扫描天线方式,完成对无人机下方或侧下方范围的覆盖。典型条件下、系统天线覆盖范围如图3所示。


图3 无人机中继测控系统天线威力覆盖范围示意图
2.2.2 相控阵天线仿真分析
无人机头部空间小,对天线尺寸限制大,重点对无人机头部安装的二位相控阵扫描天线和天线跟踪不同码率典型目标威力进行仿真计算和分析。可以得出,当采用直径600 mm圆形二维相控阵扫描天线时,低码率遥测中继威力可以与无人机对低空目标的通视距离基本相当。相控阵天线法向和30°扫描方向的方向图仿真结果如图4所示。

图4 相控阵天线仿真方向图
相控阵天线对不同码速率目标跟踪威力仿真计算结果如图5所示。

图5 相控阵天线对不同码率目标跟踪威力图
2.3 中继转发方式设计
遥测中继转发装备的转发体制可分为透明转发和再生转发两种。透明转发是转发器通过滤波、变频、放大等手段,对接收的弱信号进行增强,最终转发至末端接收设备,整个过程只是频谱搬移,无信号处理过程;再生转发则是转发器先解调接收信号,再将解调信息按终端需求的格式调制后输出。透明转发方式简单,成本较低,对转发信号格式无要求。转发器噪声与转发信号复合,影响末端接收性能;透明转发器无信号处理设备,不能作为空基测控站使用。再生转发从逻辑上等效为两套收发设备,需要增加信号处理设备,对转发信号格式有要求,相对复杂,成本较高。但是再生转发形式转发器噪声不会传递至末端接收,可有效提高链路距离;再生转发设备可以作为空基测控站使用;
一般在满足测控距离的条件下,可以采用透明转发的方式,以降低系统复杂度和成本,减小系统重量和空间。无人机载中继测控系统具体中继转发方式需要根据实际任务需求、设备复杂度、无人机载荷重量和空间约束以及效费比等方面综合考虑设计。
2.4 微系统技术
根据系统任务需求,中继测控系统需要实现遥测接收、转发、存储、位置、航向、姿态测量、系统工作状态数据采集等功能,系统功能较多,在进行系统设计时,载荷重量直接影响无人机平台的选型与设计实现,对载荷的尺寸重量等提出了异常苛刻的要求,因此需要在系统设计实现时,需要采用微系统技术对载荷进行综合化、轻量化、小型化设计。在结合芯片化、微组装等微系统技术进行系统设计实现时,首先采用理论模型、仿真优化和测试验证三者的有机结合的方案开展,重点基于立体互联微组装集成工程化技术,采用三维SiP封装技术,将射频前端进行整体设计,并进行模块化封装,然后与基带采集处理系统模块、天线进行集成,这种封装集成方案可极大的缩短天线到基带采集处理模块的距离,使信号处理模块要尽可能的靠近天线,这种集成方式可以简化设计、降低能耗、提高系统可靠性,实现了射频系统小型化,轻量化设计的要求。
2.5 相控阵天线自跟踪技术
快速稳定跟踪目标是中继转发系统的关键技术,运动中跟踪的实现,依赖惯导的位置姿态信息,雷达波控机在引导方式下工作时,接收惯导发送的位置姿态信息,解算出目标相对于无人机平台的方位俯仰角(简称甲板角),并将甲板角作为引导指令角引导飞机指向。
在正常情况下,雷达波控机在无人值守状态下工作,自动寻找目标进行跟踪,因此需要一套完善的自动工作算法流程,称作自动任务模式,自动任务模式要实现天线伺服系统在自跟踪状态、数字引导状态、搜索状态之间的智能切换。优先级顺序是自跟踪状态优先于数字引导状态,数字引导状态优先于搜索状态。
天线首先处于等待点等待目标出现,若满足自跟踪条件,则系统自动切入自跟踪状态对目标进行自动跟踪;若不满足自跟踪条件,但是数字引导信息有效,满足数字引导条件,则系统自动切入数字引导状态对目标进行跟踪;若不满足自跟踪条件,并且数字引导信息无效,则系统自动切入搜索状态对目标进行跟踪。为了防止在临界点时系统在自跟踪状态和数字引导状态或搜索控制状态之间反复切换,自跟踪状态的判据应加入滞回区间。在自动任务模式下,波控机可以在数字引导状态或者搜索状态下稳定过渡到自跟踪状态。
为了确保实际跟踪效果,也可以考虑加入远控模式,对波控机的工作方式进行人工干预。远控计算机通过监控链路对电子吊舱内波控机下发各种工作方式指令,如自跟踪、数字引导、程序控制、搜索和定点指向等,波控机根据远控计算机下发的指令工作,并将工作方式和实时角度信息反馈至远控计算机显示。
通过以上自动任务模式和远控方式,可以保证机载相控阵天线的稳定跟踪。
3 小结
本文在对现有主要遥测地面站特点进行分析的基础上,结合遥测需求,提出了一种基于中高空无人机平台的新的遥测中继转发系统实现方式,给出了系统的主要组成,简要分析了系统设计的关键技术,并对无人机平台选型设计、相控阵天线选择和设计、中继转发方式设计以及相控阵天线自跟踪技术等关键技术进行了初步分析,并给出了解决思路,后续将开展深入研究,以期此模式尽快得以工程应用。
