顾及多因子的大坝变形预测模型对比分析
2019-05-25范城城施宇军
范城城, 周 吕, 施宇军, 刘 清, 李 彬
(1.中国科学院 微小卫星创新研究院,上海 201210;2.桂林理工大学 测绘地理信息学院,广西 桂林 541000;3.广西壮族自治区自然资源遥感院,南宁 530023)
变形是指变形体受内外影响因子的影响,其形状、大小、位置在时间域和空间域中的变化[1]。变形是自然界普遍存在的一种现象,变形体包括人工建筑与自然物体等,当变形体的形变超过一定的允许范围,就可能引发自然灾害或工程灾害,如山体滑坡、地面塌陷、大坝垮塌、桥梁断裂、建筑物倒塌等。变形分析与预报是对变形监测数据进行处理,对变形体在时间与空间域上的变形性态进行描述,对变形的发展态势进行预测、预警与预报[2]。随着国民经济的持续发展与稳步增长,高层建筑物、特大桥梁、大型工业建筑物、特长隧道、大型水坝等大型工程建(构)筑物不断涌现。对工程建筑物进行变形监测,并进行变形分析与预测的目的就是为了及时掌握建筑物的工作状态,确保建筑物的安全。在施工或运营期间,工程建筑物受各种荷载的影响会产生变形,当变形量超过一定范围,就可能会引发工程质量事故或工程灾害。
20世纪80年代以来,对变形分析与预测的研究在我国得到了普遍推广。随着各类建筑物的结构日益复杂,引发建筑物形变的因子多且随机性强,逐步回归分析、灰色系统理论、Kalman滤波、小波分析、混沌理论以及BP神经网络等各种新理论与方法逐渐应用于变形分析与预测建模中,并取得了一定研究成果。随着科学技术的进步与计算机技术的发展,越来越多的理论和技术方法应用于变形分析与预测研究。由于各类建筑物变形的复杂化,单一理论与方法难以满足精确的变形分析与预测,需要发挥各种方法的优点,将多种理论与方法有机结合,建立组合模型,提高变形分析与预测的精度与可靠性[3-4]。目前,各种变形分析与预测方法多针对单一监测点或单一时间序列分析,综合考虑多测点、多物理量,建立建筑物的整体变形分析与预测综合评价模型是一个重要的发展方向[5]。
然而对建筑物进行变形分析与预测时,只考虑单一因子影响,或主观选定某些因子,许多情况下未能真正考虑多种有效因子对模型的客观影响,从而影响模型的预测精度。针对这一问题,引入灰色关联分析,通过计算多种影响因子的关联度确定因子的取舍,将选入因子看作状态输入向量,纳入模型中,建立顾及多因子的Kalman滤波模型,并与可顾及多因子影响的逐步回归模型和BP神经网络模型进行对比分析。通过分析对比新建模型与其他模型在建筑物变形预测上的精度与稳定性,以便能应用最有效的模型对建筑物变形进行预测,减少灾害事故的发生。大坝变形也是工程变形当中的常见形式[6-8],选用的工程变形案例为广西某地的大坝变形案例。
1 变形监测资料分析
实例分析数据来源于广西某大坝的20期水平位移变形监测数据,并同步监测了坝体温度、水库水位、水头3个影响大坝水平位移变形的因子。
该监测点的最大水平位移变形量为4.75 mm,最小水平位移变形量为0.36 mm,最大变形差为4.39 mm。随着时间增长,变形量未呈递增的变形趋势,且变形趋势具有一定周期性。为了分析时序、水库水位、气温、水头与变形量是否具有一定的相关性,根据数据生成变形量与各个影响因子的对比图,如图1所示。
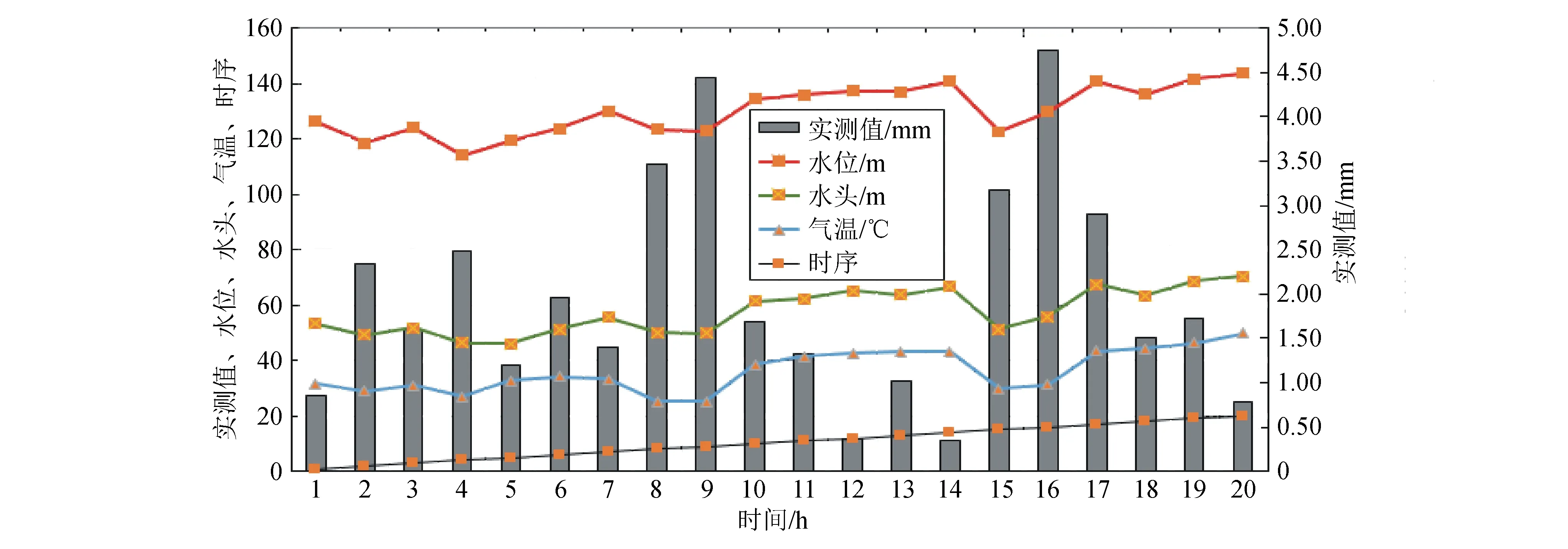
图1 实测值与时序、气温、水库水位和水头对比分析图
从图1可看出,该监测点的水平位移变形量与时序无明显相关性,随着时间的增长,变形曲线呈周期性变化;气温的变化与水平位移变形呈显著的反相关关系,气温较低时,水平变形量较大,气温较高时,水平变形量较小;水头与水平位移变形量之间的关系则相反,水头较低时,水平变形量较大;水库水位与水平位移变形量之间呈一定的正比例关系。
在以下模型预测中,4种模型均采用前17期数据进行拟合建模,后3期数据进行预测。
2 顾及多因子的模型
2.1 顾及多因子的Kalman滤波模型建立
由以上变形资料分析可知,大坝的水平位移变形会受到多个不同因子的影响,在通过建立的模型进行变形分析与预测时,运用标准Kalman滤波建立的仅考虑了某个因子的变形分析与预测模型,限制了模型的自适应性,从而使得模型的拟合与预测误差较大,难以获得较好的预测效果。为了弥补这一缺陷,运用灰色关联分析对影响大坝水平位移变形的影响因子进行关联度分析,将对大坝水平变形影响较大的因子选出,并将其看作状态向量,纳入模型分析中,从而建立顾及多因子的Kalman滤波模型。
该大坝的变形监测数据为离散数据,故采用离散随机线性系统的Kalman滤波,其数学模型为:
Xk=Fk/k-1Xk-1+Gk-1Wk-1,
(1)
Lk=HkXk+Vk。
(2)
其中:Xk、Lk为k时刻的状态向量、观测向量;Fk/k-1为k-1时刻到k时刻的状态转移矩阵;Gk-1为k-1时刻的动态噪声矩阵;Wk-1为k-1时刻的动态噪声;Vk为k时刻的观测噪声;Hk为k时刻的观测矩阵。
根据最小二乘原理,可推得Kalman滤波递推公式。
状态向量的一步预测
(3)
状态向量一步预测的方差矩阵
(4)
其中Qk为系统动态噪声方差阵。
状态向量估计值
(5)
状态向量估计值的方差矩阵
Pk=(I-JkKk)Pk/k-1,
(6)
其中Jk为滤波增益矩阵,
(7)
Rk为系统观测噪声方差阵。
确定滤波初始值后,便可通过Kalman滤波递推算法完成滤波与预测。
大坝的水平位移变形量受水库水位、气温、水头等多个影响因子的影响。为了充分考虑各影响因子对大坝水平位移变形的影响,通过灰色关联度分析确定主要影响因子,并将其看作状态向量,建立顾及多因子的Kalman滤波模型。
以该大坝的水平位移变形监测数据为例,通过灰色关联分析,计算水库水位、气温、水头、时间与变形量之间的关联度,得到的结果为变形量受水库水位、气温、水头的影响较大。故将水库水位、气温、水头作为状态向量引入模型中,则观测方程为
(8)
将连续2期的观测方程相减,得

γ‴k-1ΔS+vk-1Δt+ΔV,
(9)

Lk=Hk-1Xk-1+Vk-1。
(10)
在该大坝动态变形系统中,大坝的动态性不强,变化缓慢,故在初值确定时,将变形加速率作为随机干扰,并视为白噪声,进而可得出状态方程与观测方程的各个系数矩阵:
将上述系数矩阵代入式(1)、(2),可得系统的状态方程与观测方程,依据式(3)~(7),可实现滤波的推算过程,从而完成该大坝监测点的水平变形分析与预测。
2.2 逐步回归模型
逐步回归分析(stepwise regression analysis,简称SRA)是将变量在其偏回归平方和经检验都显著的情况下逐个引入,同时对每个选入的新变量进行逐个检验,以剔除不显著变量,保证最后所得的变量子集中的所有变量都是显著的,经过若干步后便得到“最优”变量子集[9]。
逐步回归的数学模型为[10]
y=Xβ+ε,
(11)
其中:y为因变量;β为未知参数;ε为随机误差;X为自变量。增加一个自变量u,相应的资料向量为un×1,于是模型(11)可变为
(12)
其中bu为自变量u的参数。要确定变量u是否进入变量子集,需检验假设bu=0,检验统计量为
(13)

若假设bu=0被接受,则变量u不能入选;若假设被否决,则变量u应入选。
当对变量进行选入的同时,还需对已选入的变量进行显著性检验,将显著性不强、对模型贡献率不大的已选变量进行剔除[10]。
在变形分析中,由于变形(称效应量)受温度、地质、水位等方面的影响因子影响较多,通常选择多元回归分析模型,如用多元逐步回归分析法可以建立效应量与影响因子之间的函数模型,此模型可作大坝变形的物理解释与变形预测[11]。在回归分析法中,逐步回归模型可以比较合理地选入与剔除模型的影响因子,故在大坝变形分析与预测中有较好的应用效果。回归分析法在进行变形分析与预测时,认为监测数据之间相互独立,是一种静态的变形分析与预测方法,只能反映效应量与影响因子之间在同一时刻的相关性,不能体现变形监测序列的时序性。
2.3 BP神经网络模型
人工神经网络(artificial neural network,简称ANN)是由诸多人工神经元按照一定连接方式按权值连接构成的网络[1]。人工神经网络有近百种的神经网络模型,但在变形分析与预测中,运用较多且较成熟的是误差反向传播神经网络,即BP神经网络。BP神经网络是一种前馈型网络,由输入层、隐含层、输出层构成,层与层之间多采用全部连接方式,同层单元之间不存在相互连接[12]。图2为BP神经网络模型图。其中:x1,x2,…xM为输入层;y1,y2,…yN为输出层;wkm为输入层节点到隐含层节点的连接权值;wnk为隐含层节点到输出层节点的连接权值;h1(x),h2(x),…,hK(x)为隐含层。
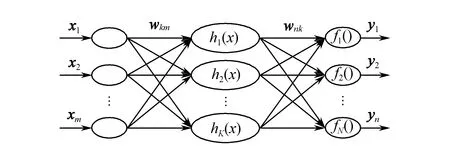
图2 BP神经网络模型图
BP神经网络算法步骤如下[13-14]:

2)输入训练样本X=(x1,x2,…,xm)及相应的期望输出样本D=(d1,d2,…,dn)。

5)权值调整。隐含层与输出层权值调整式为
δnk=(dn-yn)yn(1-yn)。
输入层与隐含层权值调整式为
其中δnk、δkm为梯度向量。
6)输入下一个样本,即p=p+1。
7)当E<ε或达到最大迭代次数时,停止网络学习,否则将p重置为1,并转入步骤2)。
3 试验结果分析
3.1 标准Kalman滤波模型的变形预测结果
由该大坝的变形资料可知,大坝的动态性不强、变化缓慢,故选择常速度模型作为Kalman滤波的状态模型,将水平位移的变形加速率视为白噪声。
标准Kalman滤波模型仅将变形量引入模型的观测方程中,依据变形监测数据取初始状态向量
观测噪声方差阵Rk=0.5,动态噪声方差阵Qk=2。
由前2期监测值的平差值求得初始状态向量的协方差阵
依据标准Kalman滤波模型计算出模型的拟合值与预测值,绘出标准Kalman滤波模型的计算值与原始监测数据的对比图及标准Kalman滤波模型的残差柱状图,如图3、4所示。
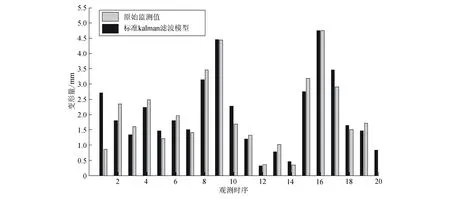
图3 标准Kalman滤波模型计算值与实测值对比图
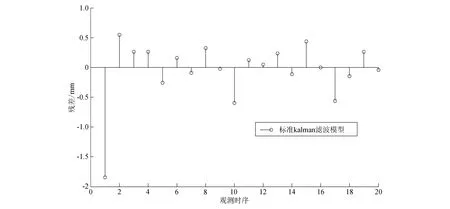
图4 标准Kalman滤波模型残差柱状图
从图3、4可看出,该大坝的水平变形具有周期性,且波动较大,标准Kalman滤波模型的预测曲线能较好地反映大坝的变形趋势;模型前2期的计算值与实测值相差较大,第1期数据出现明显发散现象,残差基本在±0.5 mm范围内波动;模型残差值有正有负,且正负残差的比例接近1∶1,表明该模型残差具有随机性。
3.2 顾及多因子Kalman滤波模型的变形预测结果

将顾及多因子的Kalman滤波模型的运算值同实测数据进行对比,结果如图5所示,并绘制顾及多因子的Kalman滤波模型的残差柱状图,如图6所示。
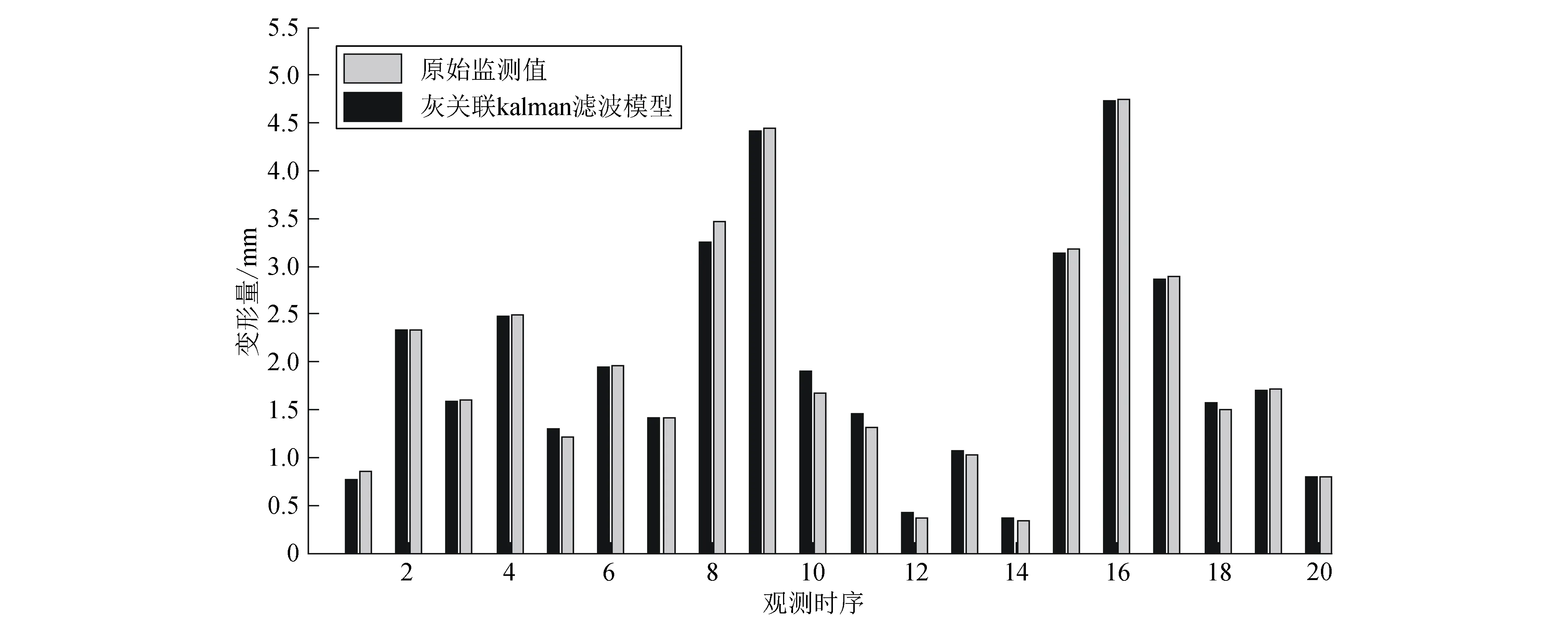
图5 顾及多因子的Kalman滤波模型计算值与实测值对比图

图6 顾及多因子的Kalman滤波模型残差柱状图
对比图5、6可知,顾及多因子的Kalman滤波模型的预测曲线与实测曲线的变化趋势非常接近,顾及多因子的Kalman滤波模型的残差基本在±0.1 mm范围内波动,且模型第1期数据未发散;由于顾及多因子的Kalman滤波模型考虑了水库水位、气温、水头的影响,并将其作为状态向量引入模型中,较好地修正了模型精度,提高了模型的自适应性,可以较好地弥补标准Kalman滤波模型拟合与预测误差偏大的缺陷。
3.3 BP神经网络模型变形预测结果
在通过BP神经网络模型进行大坝变形分析与预测时,不同的输入模式对大坝水平位移量的预测结果有一定影响,经过多次实验,采用水库水位、气温、水头作为网络的输入因子,大坝水平变形量作为网络的输出值。将这20期监测数据分为训练样本与测试样本,其中训练样本数为17期,测试样本数为3期。设计程序在建立BP神经网络模型之前采用mapminmax函数将网络的输入数据进行归一化处理;网络采用traingdx函数作为训练函数,设定网络的学习效率为0.01,动量系数为0.90,预设精度为0.01,最高迭代次数1 000次;根据确定的影响因子将隐含层神经元数设为10,构建3×10×1的BP神经网络模型。利用训练好的网络模型对大坝水平位移量进行预测。
通过BP神经网络模型计算的该大坝水平位移变形拟合值、预测值与实际监测值的对比情况如图7所示,模型的残差如图8所示。
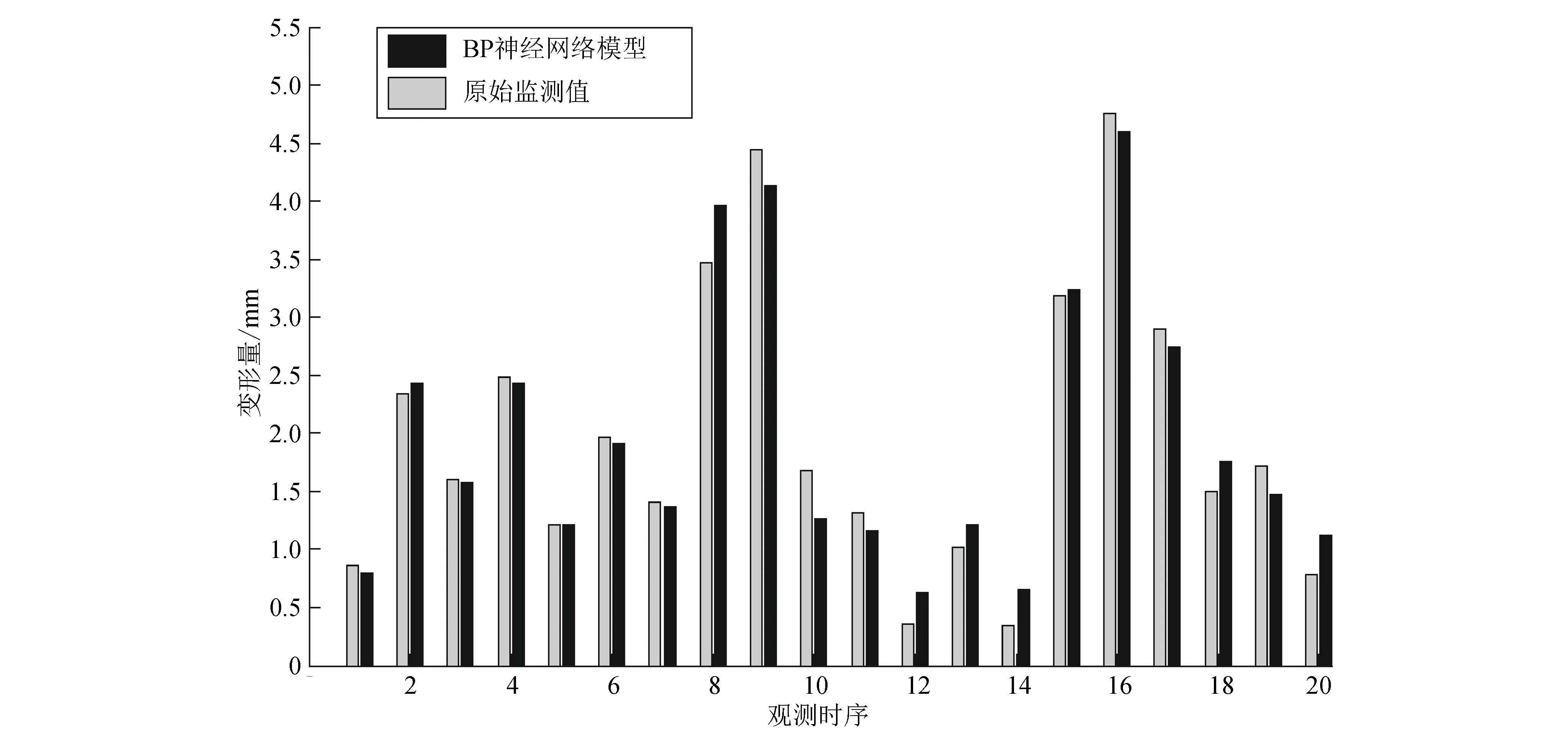
图7 BP神经网络模型计算值与实测值对比图
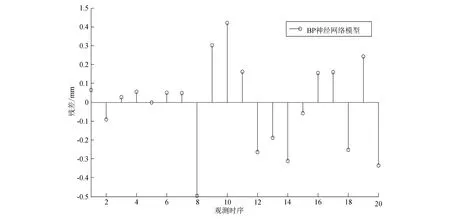
图8 BP神经网络模型残差柱状图
3.4 逐步回归模型变形预测结果
利用社会科学统计软件(SPSS statistics 17.0)进行数据分析,建立顾及多因子影响的逐步回归模型。在利用SPSS进行逐步分析之前,将该大坝的水平位移监测值定义为被解释变量,而水库水位、气温、水头、时序定义为解释变量,设置逐步回归分析中解释变量进入或剔除回归方程的标准:进入为0.05,剔除为0.10。通过逐步筛选变量建立最优逐步回归模型,模型计算结果如图9、10所示。
利用SPSS计算模型的检验统计量F=62.979、P=0,并绘出标准化残差的直方图和概率分布图,由模型残差为正态分布,且F值远大于F的检验临界值,P=0远远小于α=0.05,故该模型显著性较明显,模型可用,具有实际意义。
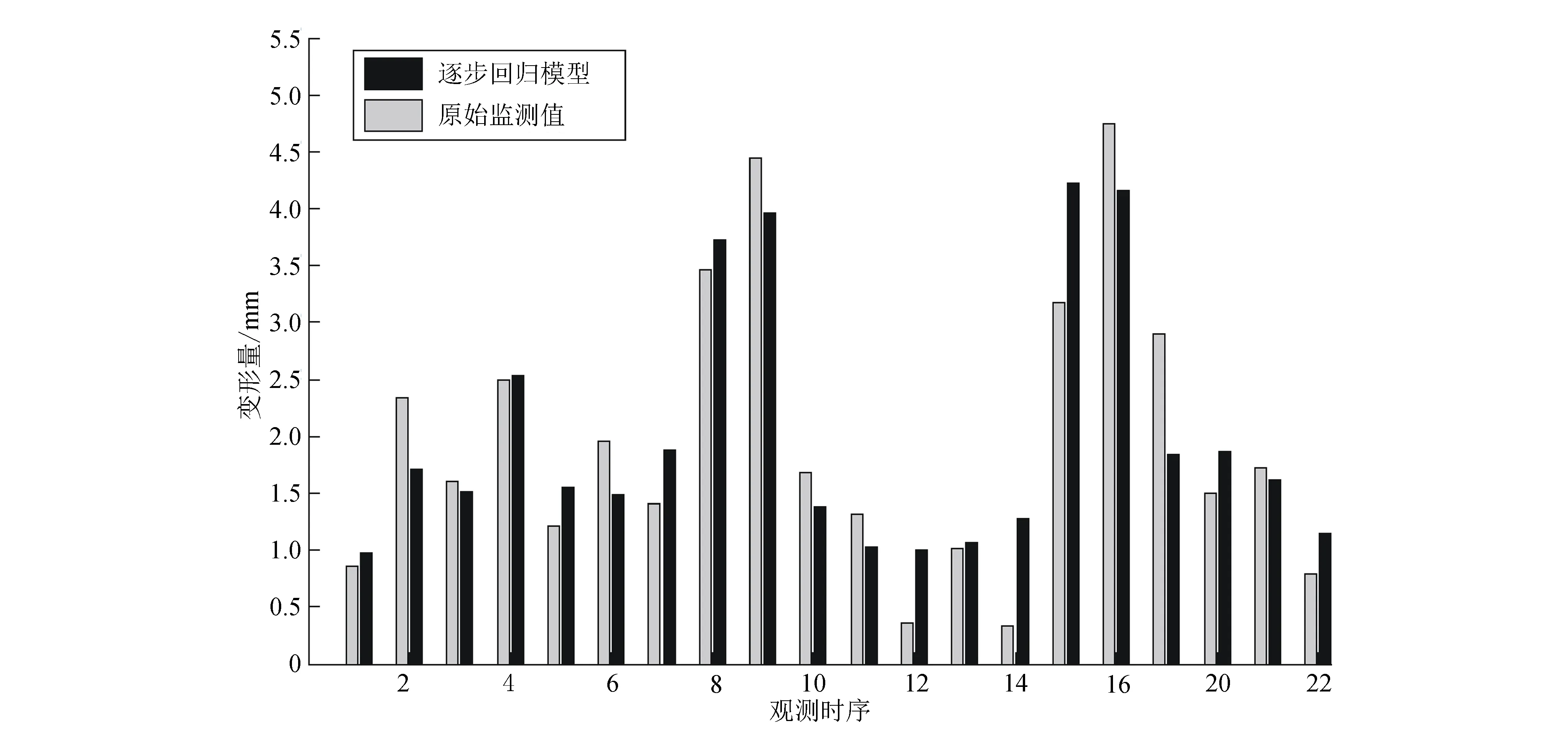
图9 逐步回归模型计算值与实测值对比图
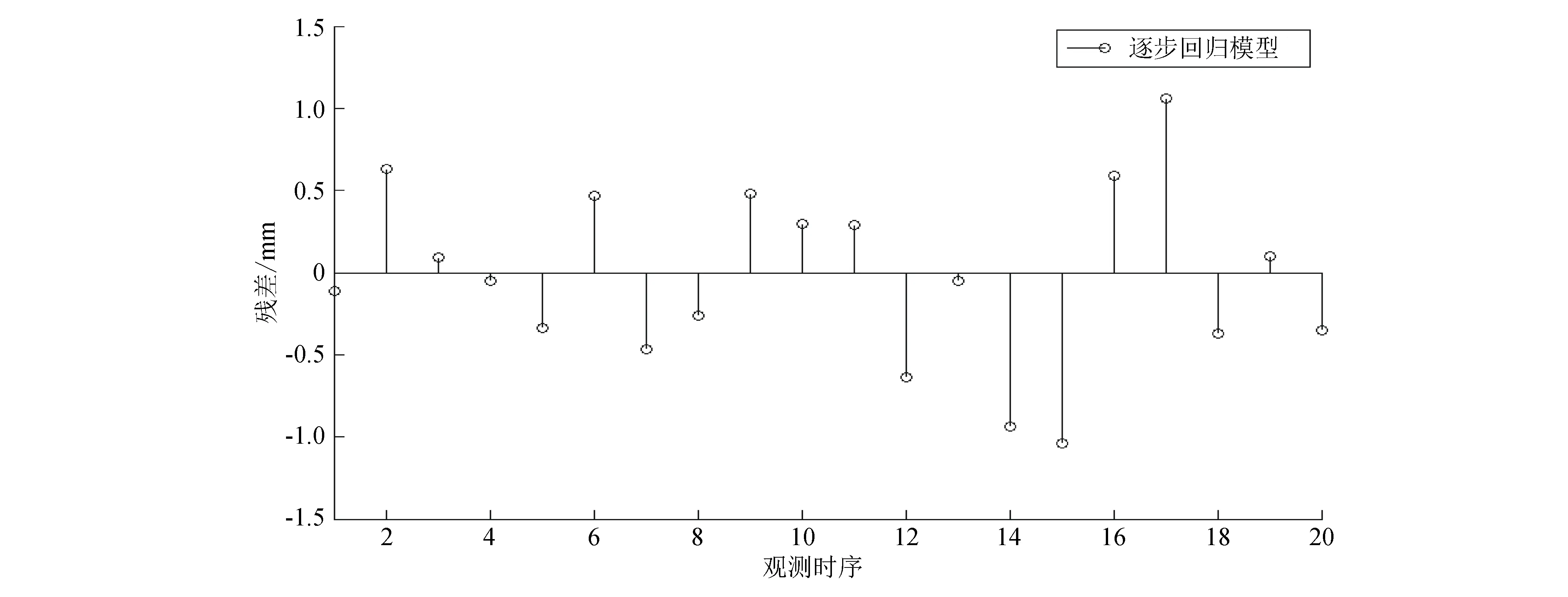
图10 逐步回归模型残差柱状图
4 综合对比分析
将标准Kalman滤波模型设为模型1,顾及多因子的Kalman滤波模型设为模型2,BP神经网络模型设为模型3,逐步回归模型设为模型4。利用后验差检验法对上述4种模型进行精度检验,结果如表1所示。
表14种模型的精度对比
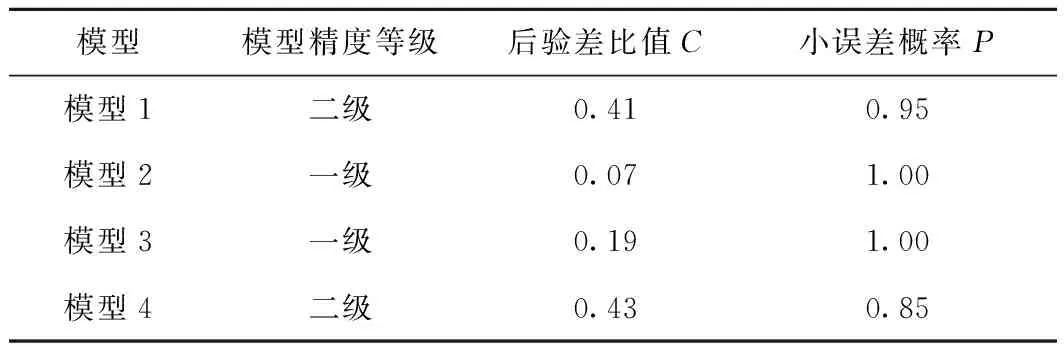
模型模型精度等级后验差比值C小误差概率P模型1二级0.410.95模型2一级0.071.00模型3一级0.191.00模型4二级0.430.85
对于各个模型的精度,采用均方误差、平均绝对误差及平均绝对相对误差进行误差分析,结果如表2所示。
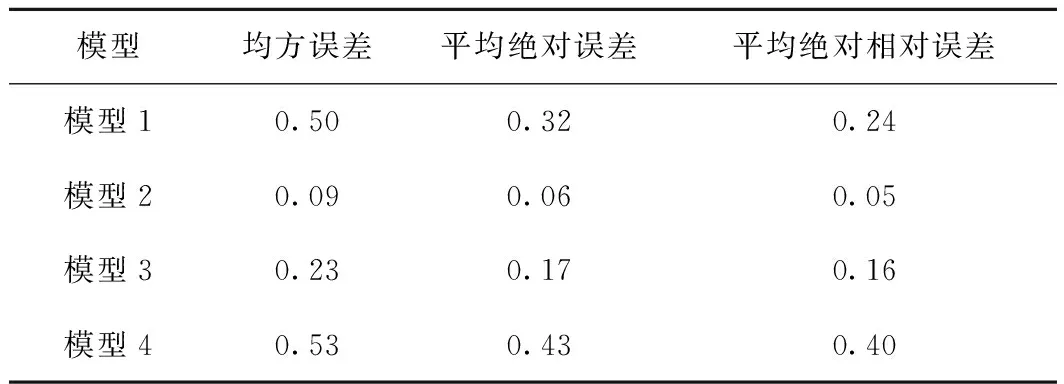
表2 4种模型误差对比 mm
由以上图表分析可知,逐步回归模型的残差普遍较大,最大残差为1.05 mm,有6个残差超过0.50 mm,模型均方误差为0.53 mm;标准Kalman滤波模型的残差较逐步回归模型普遍稍小,最大残差为-1.84 mm,有4个残差超过0.50 mm,模型均方误差为0.50 mm;BP神经网络模型的残差相对较小,最大残差为0.50 mm,仅有1个残差超过0.50 mm,模型均方误差为0.23 mm;顾及多因子的Kalman滤波模型的残差最小,最大残差仅为0.22 mm,有3个残差超过0.10 mm,其余残差均小于0.10 mm,模型均方误差为0.09 mm,其余各项精度指标均优于其他3种模型。4种模型均达到了较好的拟合与预测精度,但综合各项精度指标,顾及多因子的Kalman滤波模型的拟合精度以及预测效果最好,该模型全局最优。
将4种模型的运算值同实测数据进行对比,结果如图11所示。4种模型的残差曲线如图12所示。
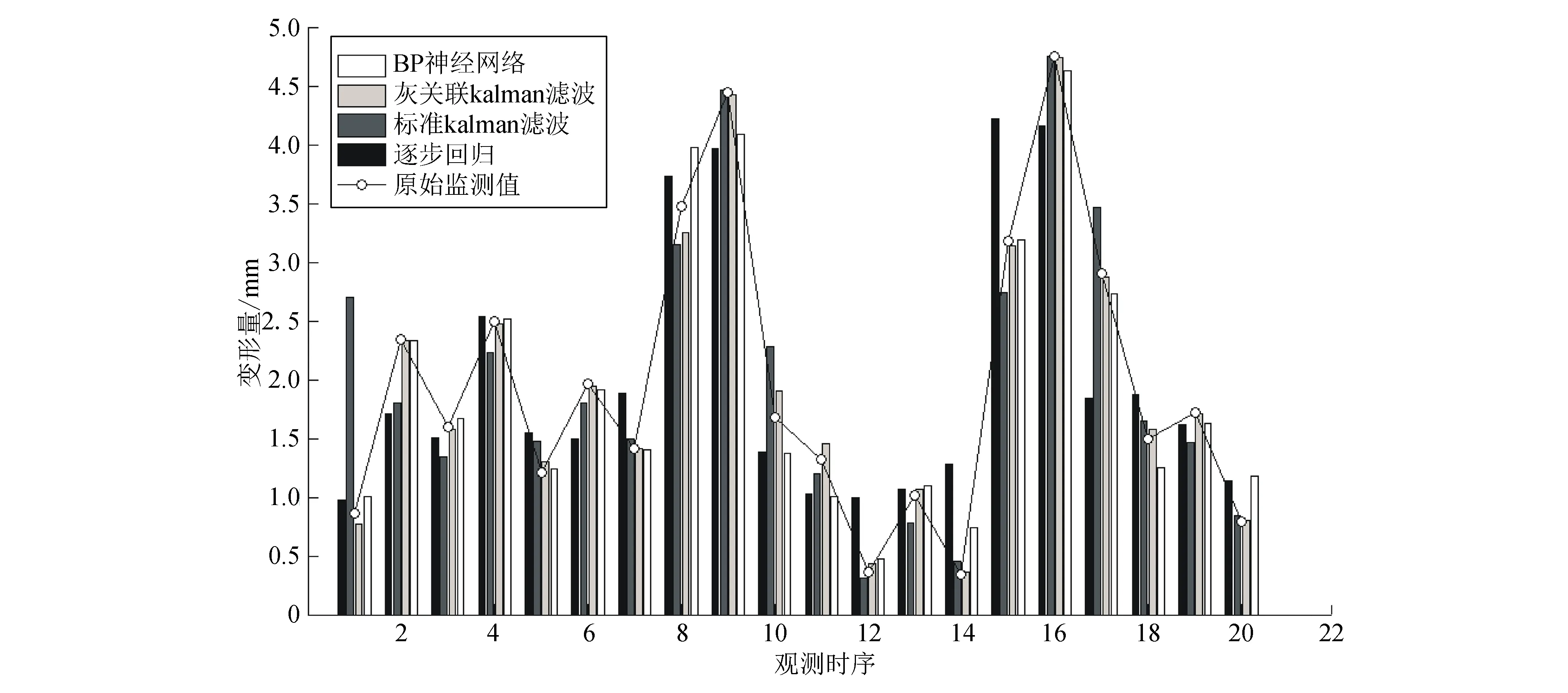
图11 4种模型结果对比图
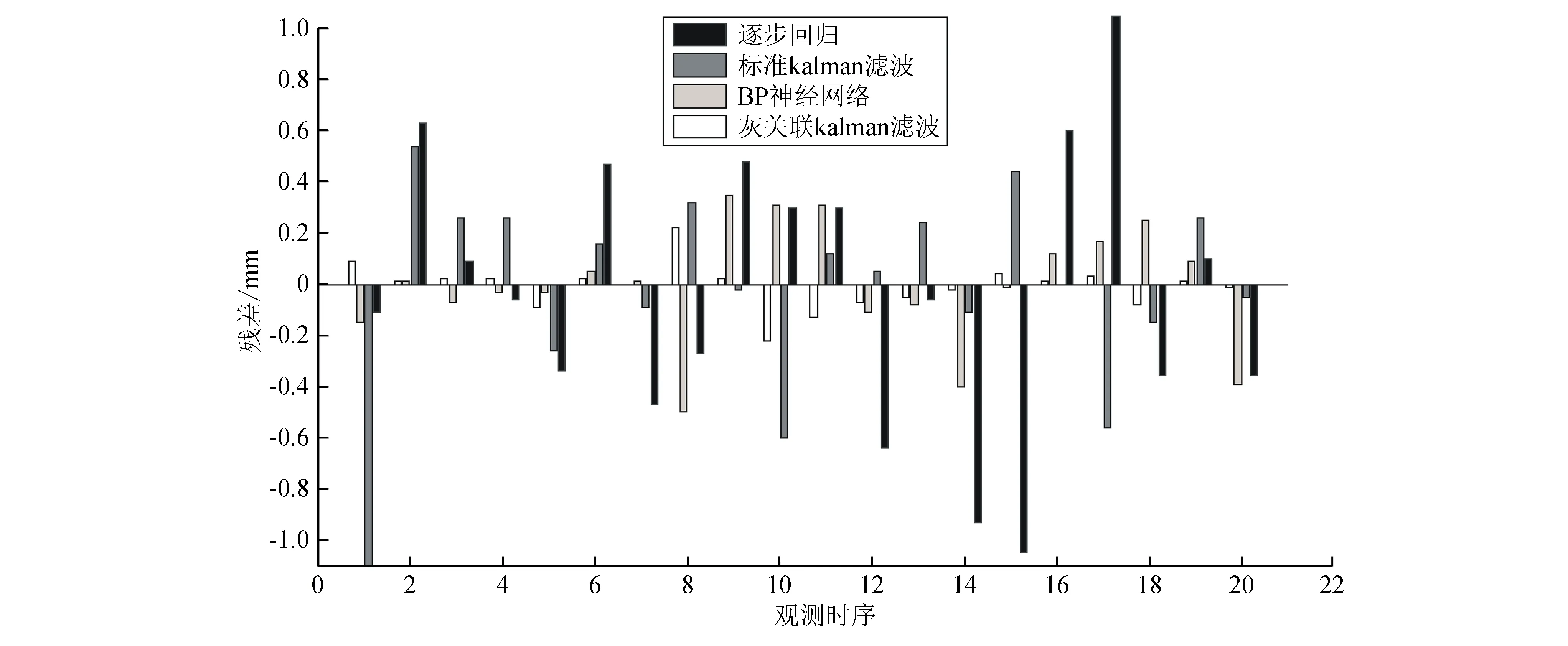
图12 4种模型残差曲线对比图
从图11可看出,该大坝的水平变形具有周期性,且波动较大,4种模型的预测曲线均能较好地反映大坝的变形趋势;逐步回归模型的预测曲线与实测曲线相差较大,顾及多因子的Kalman滤波模型的预测曲线与实测曲线的变化趋势非常接近,该模型不仅考虑了水库水位、气温、水头的影响,同时顾及多因子的Kalman滤波模型也是一个“一步预报-修正”的循环过程,在预测过程中能较好地修正模型误差,故其预测精度较其余3种模型高,且预测更准确。由图11可知,逐步回归模型与标准Kalman滤波模型的残差曲线波动较大,顾及多因子的Kalman滤波模型的残差曲线在零附近几乎呈一条直线。综合4种模型的预测曲线与残差曲线可知,顾及多因子的Kalman滤波模型的预测精度最高。
5 结束语
针对影响变形体变形的因子较多,而标准Kalman滤波在建模分析时仅考虑单一因子以致模型精度不高的问题,在灰色关联分析与Kalman滤波原理的基础上建立了顾及多因子影响的顾及多因子的Kalman滤波模型。以某大坝的20期水平位移变形监测资料数据为例,利用顾及多因子的Kalman滤波模型对大坝进行变形分析与预测,并与标准Kalman滤波模型、BP神经网络模型、逐步回归模型进行对比,得出以下结论:
1)顾及多因子的Kalman滤波模型在建模时将对大坝变形影响较大的因子作为状态向量,并引入模型中,一定程度上改善了标准Kalman滤波的递推算法,提高了模型的自适应性与预测精度;
2)BP神经网络模型、逐步回归模型、顾及多因子的Kalman滤波模型均顾及了多因子的影响,但由于顾及多因子的Kalman滤波模型在计算过程中是一个“一步预报-修正”的递推过程,模型自适应较强,可以较好地修正模型误差,预测精度也较高。
