镜像反馈对自闭症儿童姿势控制的影响
2019-05-24谢梦炜董晓虹
谢梦炜,董晓虹
(1.浙江大学 教育学院体育系,浙江 杭州 310028;2.浙江大学 公共体育与艺术部,浙江 杭州 310058)
0 前 言
自闭症又称自闭症谱系障碍(ASD),指以沟通障碍、社会交往障碍、兴趣范围狭窄及行为重复刻板为核心症状的一类神经发育障碍性疾病[1]。然而,除了上述核心症状,许多研究发现自闭症儿童姿势控制能力存在缺陷[2]。一篇纳入19个研究的元分析指出,自闭症儿童姿势控制能力在感觉受到干扰的条件下,稳定性显著弱于正常儿童[3]。
姿势控制[4,5]是指在各种活动中,保持身体在空间位置上的稳定性(stability)和定向性(orientation)的能力。稳定性是指在空间中保持身体某一姿态的能力,尤其是指维持重心(center of gravity,COG)在空间某一特定范围中的能力。定向性是指在执行不同目的的动作中,调整身体各部位的姿态以及身体和环境之间相互适应的能力。
目前,姿势控制较为通用的测量方式是通过测力台间接测量。人体静止站立姿势控制所表现的固有运动学特征是身体重心(COG,Central of Gravity)具有微小且无规则的摆动,这种运动特征反映了站立姿势控制的稳定性。即姿势的晃动被控制在越低的水平,姿势控制能力就越好[6]。因此,姿势控制的稳定性可根据COG的摆动轨迹进行衡量。但COG轨迹测量较为困难,可以通过压力中心(COP,center of pressure)间接测量COG的摆动轨迹。COP可由测力台进行测量[7]。
姿势控制与日常生活密切相关[8]姿势控制的缺陷将会影响自闭症儿童的感觉运动技能和社会功能,使其学习能力进一步下降[9],自闭症儿童的姿势控制能力需要被重视。
根据姿势控制系统的功能,镜像反馈可通过增加个体的视觉输入从而提高姿势控制能力。姿势控制的功能是由感知系统、神经系统和运动系统相互协作完成。是基于视觉、前庭和本体感觉的感觉输入,在中枢神经系统的整合作用下,通过神经肌肉控制得以实现的[7]。不同感知觉对姿势控制的影响不同,其中视觉对姿势控制影响尤为显著[3]。镜像反馈可以为个体提供额外的视觉信息,使个体在姿势控制的过程中拥有更多身体相对于空间的位置信息,这可能有助于个体姿势控制。
目前已经有研究者利用镜子为被试提供自身影像的视觉生物反馈(镜像反馈),从而提高被试的姿势控制能力[10]。这种反馈可以通过在被试前方放置一面镜子反射影像实现,也可以通过摄像头拍摄影像后通过屏幕展示影像实现。例如Martin等(2008)对18名健康女性进行了镜像/非镜像的坐姿控制实验,研究发现,镜像反馈条件下被试的姿势稳定性指标显著低于非镜像反馈条件[11]。Jacques等(2004)则对老年人进行了镜像/非镜像的站姿控制实验,结果也显示,老年人在镜像条件下中间外侧(Mediolateral)的姿势晃动显著低于非镜像条件[10]。此外镜像反馈在残障群体中也有研究,Petra等(2009)在对胫骨截肢的老年人的镜像/非镜像的站姿控制实验中,同样发现镜像显著降低被试的姿势晃动[12]。在自闭症群体中,Nicholas等(2015)在研究中发现,自闭症儿童在走向镜子时步态更正常[13],但是该结论是基于观察,可信度有待提高。
综上所述,镜像反馈已经被广泛用于姿势控制能力的研究中,且均能减小受试者的姿势晃动,即提高被试姿势控制能力。而镜像反馈对自闭症群体的影响依然不明确,还需更多研究进行补充。为此,本研究以不同形式的镜像反馈下自闭症儿童姿势控制能力为研究内容,采用Wii balance board 对自闭症儿童静态姿势控制能力进行测试,探讨不同形式的镜像视觉反馈对自闭症儿童姿势控制能力的影响,为自闭症儿童姿势控制训练提供理论依据。
1 研究对象与方法
1.1研究对象
从杭州康乃馨自闭症康复中心招募14例ASD儿童作为被试。由于自闭症儿童的发病率呈现明显的性别特征,男性明显大于女性,所以本研究选择自闭症男童作为被试。每个被试都符合美国精神障碍诊断手册第五版(Diagnostic and statistical manual of Mental Disorder,5th edition,DSM-5)[1]的诊断标准。排除带有自闭症通常共患遗传/精神性的疾病(脆性X染色体综合征、唐氏综合征、多种抽动综合征、癫痫等),身体缺陷和运动障碍的儿童。被试在实验期间没有服药,实验过程征得监护人同意,并签署同意书。研究对象基本情况(见表1)。
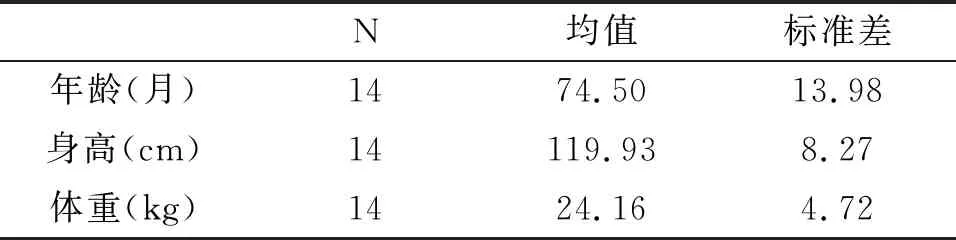
表1 受试者基本情况
1.2研究方法
1.2.1 测试仪器。本研究用Wii Balance Board(WBB)[14]测量受试者压力中心(COP)的运动,监测受试者姿势晃动。WBB蓝牙连接笔记本电脑(HP envy15),距离1.5m,电脑安装BrainBlox[15]软件来获取和记录WBB采集的数据。WBB采样频率为100Hz,可采集时间、COP在X方向上到圆心的距离值和COP在Y方向上到圆心的距离值等,该数据通过MATlab(2014a)编程计算后可获得姿势控制测试常用指标。
1.2.2 实验过程。所有测试在杭州康乃馨儿童康复中心的一间安静且被试较为熟悉的房间中进行,以尽量减少额外的干扰。实验者1在被试左后方操作电脑记录数据,实验者2负责和被试交流,以确保被试明白任务的要求。
实验过程中,被试赤脚站立在WBB上,两脚平行放置且间距10cm,手贴裤腿,要求在6种不同的条件下安静站立20s,站得越稳定越好。每种条件测试两次,顺序如下:1,2,3,4,5,6,6,5,4,3,2,1。将两次数据平均后用于分析。每次测试之间给予充分的休息时间以防止潜在的疲劳效应。
6种测试条件是由3种视觉因素*2种本体感觉因素组成(见表2)。

表2 测试条件
正常视觉条件(无反馈):要求被试看标记方块(蓝色,5cm*5cm),方块贴在被试正前方1m处的白色墙壁上,高度与被试眼部一致。
基于镜像的视觉反馈条件(镜像):要求被试看镜子,镜子为全身镜,被固定在正前方1m处的墙壁上。
基于投影的镜像视觉反馈条件(投影镜像):要求被试看投影呈现的镜像,投影的镜像画面与人同高。投影镜像视觉反馈实现方式如下:固定在被试正前方的摄像头(Iphone7Plus)捕捉被试图像信息,并将视觉信息无线传输到投影仪(Epson CB-X05E),投影仪将摄像头捕捉到的信息投影到被试正前方1m处的白色墙壁上实现镜像,镜像高度与被试相同,图像延迟0.27s。
本体感觉干扰通过在WBB上加泡沫垫(Airex,50cm*41cm*60mm)实现。
1.2.3 测试指标。本实验使用WBB采集的原始数据在MATlab计算得到的两个姿势稳定性指标COP_v_ap和COP_v_ml。
COP_v_ap:是COP在前后方向(ap:anterior-posterior)的晃动平均速度。
COP_v_ml:是COP在左右方向(ml:medial-lateral)的晃动平均速度。
1.2.4 统计学分析。本研究数据用SPSS 20统计软件进行处理,采用两因素协方差分析(视觉*本体感觉),判断在调整月龄、身高和体重的影响后,不同视觉和本体感觉条件对自闭症儿童姿势控制COP_v_ap和COP_v_ml指标的影响。
2 结 果
各组内协变量和因变量的回归直线平行(P>0.05)。各组内因变量的残差接近于正态分布。通过绘制散点图和进行Levene's检验发现,各组内/组间因变量的残差具有等方差性。同时,本研究数据不存在标准化残差大于3的情况,提示没有显著离群值。
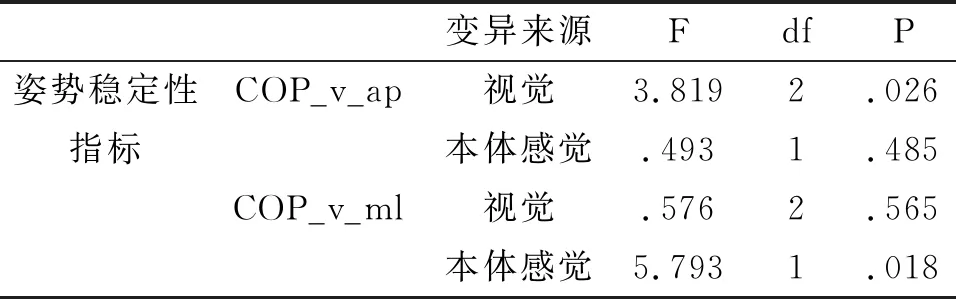
表3 视觉与本体感觉对姿势稳定性的影响协方差分析表
在本研究中,视觉和本体感觉因素在对COP_v_ap和COP_v_ml的影响上不存在交互作用。F(COP_v_ap)(2,75)=0.026,P=0.974;F(COP_v_ml)(2,75)=0.292,P=0.747。简化后的无交互模型主效应分析提示(见表3),视觉对COP_v_ap的影响具有统计学意义。F(2,77)=3.819,P=0.026。本体感觉对COP_v_ml的影响具有统计学意义。F(2,77)=5.793, P=0.018。
采用成对比较分析COP_v_ap视觉的主效应结果。无反馈、投影镜像和镜像反馈条件的COP_v_ap估算边际均值分别为4.004(cm/s) [95%CI:3.899~4.108(cm/s)]、3.974(cm/s) [95%CI:3.870~4.078(cm/s)]和、4.164(cm/s) [95%CI:4.060~4.269(cm/s)]
其中,无反馈条件的COP_v_ap比投影镜像条件大0.030(cm/s)[95%CI为-0.118~0.177(cm/s)],P=0.690;无反馈条件的COP_v_ap比镜像反馈条件小0.161(cm/s) [95%CI为-0.308~0.013(cm/s)],P=0.033,投影镜像条件的COP_v_ap比3小0.190(cm/s) [95%CI为-0.338~-0.043(cm/s)],P=0.012,差异显著。
采用成对比较分析COP_v_ml本体感觉的主效应结果。本体感觉无干扰条件和本体感觉干扰条件的COP_v_ml估算边际均值分别为2.716(cm/s) [95%CI:2.652~2.780(cm/s)]和2.825(cm/s) [95%CI:2.761~2.889(cm/s)]
其中,无干扰条件的COP_v_ap比本体感觉干扰小0.109(cm/s)[95%CI为-0.200~0.019(cm/s)],P=0.018,差异显著。
3 讨 论
COP_v_ap和COP_v_ml是两个反映人体姿势晃动程度的指标,这两个指标越小表示个体的姿势稳定性越好。COP_v_ap是个体前后方向晃动的平均速度,可以指示前后方向的晃动大小;COP_v_ml是个体左右方向晃动的平均速度,可以指示左右方向的晃动大小。
视觉是自闭症儿童姿势控制过程中较为依赖的一种感觉,探索不同形式的镜像视觉反馈对自闭症儿童姿势控制能力的影响,对自闭症儿童未来康复手段的选择具有指导意义。
在本研究中,镜像条件与无反馈条件的对比结果显示,自闭症儿童在镜像视觉反馈条件下,姿势前后方向晃动比无反馈条件有明显上升,差异显著(P=0.033),而自闭症儿童在镜像视觉反馈条件下,姿势左右晃动与无反馈条件无显著差异。
镜像反馈对姿势控制前后方向和左右方向晃动的影响不同,这一结果与正常成年人中的研究相符[16]。但本研究中镜像反馈增加了自闭症儿童的前后方向姿势晃动,姿势稳定性下降,与前人研究结果相反。镜像反馈在正常群体[11]和肢体残疾人群的实验中[12],均显示能够降低姿势晃动,提高姿势稳定性。
这可能是因为自闭症儿童认知能力的缺陷导致的,Yi(2017)等的研究显示,视觉干扰会导致自闭症儿童更大的姿势晃动,自闭症人群姿势稳定更多的依赖于视觉[3];与Yi(2017)的结论相反,Michail(2016)等则发现视觉干扰(晃动的空间)下正常群体的姿势晃动比自闭症患者要大,认为自闭症群体在姿势稳定过程中对视觉的依赖更小[17]。结合本研究中,镜像反馈增加自闭症儿童姿势晃动,提示我们另一种可能的解释,即自闭症儿童的认知能力存在缺陷,对于新增的视觉信息,自闭症儿童难以捕捉到关键信息(无论是有利的镜像反馈信息,还是负面的模拟空间晃动信息)。
投影镜像条件与无反馈条件的对比结果显示,左右方向的姿势晃动和前后方向的姿势晃动均减小,但无显著性差异。
投影镜像条件与镜像条件的对比结果显示,自闭症儿童在投影镜像条件下比镜像条件前后方向的姿势晃动显著减小。被试获得相似的视觉信息,两组姿势晃动差异显著,这提示我们视觉反馈的呈现方式(镜子vs投影)是影响自闭症姿势晃动的因素。可能的解释是,投影对自闭症儿童具有吸引力,让自闭症儿童注意到镜像信息,从而提高自闭症儿童姿势控制能力,但造成此差别的机制还有待进一步研究。
本研究中,有本体感觉干扰组比无本体感觉干扰组在左右方向的姿势晃动显著增加,这与之前的研究结论相符。
本研究的局限性有如下两点:
一是能够完成姿势控制测试的自闭症儿童,智商与理解能力可能会高于自闭症儿童平均水平,这会导致本研究的结果只能代表一部分自闭症群体。
二是本研究缺乏正常发育儿童组作为对照,虽然研究者已经证明自闭症儿童群体的姿势控制能力是有缺陷的,但是在不同形式的视觉反馈下自闭症儿童与正常发育儿童的差异也值得进一步研究。
4 结 论
4.1 自闭症儿童面对镜子时,前后姿势晃动显著提高,姿势稳定性下降。
4.2 不同镜像反馈呈现方式对自闭症儿童姿势控制影响不同,投影镜像反馈优于镜子镜像反馈。为自闭症儿童提供视觉信息时,投影呈现方式优于镜子。