基于祯内编码和DSP图像处理的农机避障控制
2019-05-21伍坪
伍 坪
(三明学院 机电工程学院,福建 三明,365000)
农机避障系统的设计对于提高其工作效率和作业质量具有重要的意义,受到作业环境的影响,农机监控系统采用传统意义上的摄像机和PC 机相连接组成的导航系统不太可行,因为这种方案不仅成本高,而且系统的稳定性和安全性也比较低,系统的整体效率也不高。嵌入式DSP 处理器体积小、功能多、编程方便,可以将视频采集、视频编码处理和网络传输等功能集成于一体,并且利用计算机可以对多个地点进行视觉扫描,如果将其使用在农机避障系统的设计上,对于提高整个农机系统的效率和质量会发挥重要的作用。
1 祯内编码技术
祯内编码是20 世纪70年代由Slepian 和Wolf 为无损编码建立祯内源编码 (DSC) 信息理论界限,以及Wyner 和Ziv 在解码器上使用SI(Service Information)进行有损编码的结果。无损DSC 指的是通过利用统计依赖性,分别对两个相关随机源进行编码和联合解码。
假设两个统计依赖性的随机序列分别为X 和Y,在对X 和Y 进行编解码的过程中,可以通过熵编码实现RX和RY的速率,使得RX≥H(X)和RX≥H(Y),其中H(X)和H(Y)分别是X 和Y 的熵。Slepian-Wolf(SW)定理证明了联合解码可以获得更好的速率,并且能够对总速率RX+RX给出更严格的界限。由SW 建立的允许速率区域对应于图1中的阴影区域,其表达式如下:

用SI 方法实现对视频的解码情形下,X 源取决于某些SI 的Y 源, 其对应于图1中所示的区域边界上的灰色区域。不久之后,Wyner 和Ziv 在解码器中建立了用于有损压缩的边界, 作为对SW 定理中SI 的扩展。在这种情况下,X 源在编码中不再取决于SI 的Y 源,而解码器可以访问SI 以产生具有一定失真D 的X 源。
本研究的祯内视频编码系统方案是以解码器驱动的, 系统中编码器的奇偶校验位的请求是经由反馈信道执行的,以保证成功解码。若解码的位平面的错误概率低于10-3,且其CRC 与从编码器接收的CRC 匹配,则认为解码成功。
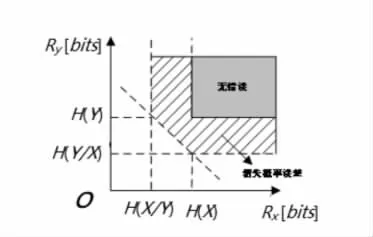
图1 Slepian-Wolf 界限定义的可实现速率区域
2 DSP 高速视频图像处理系统总体设计
本研究基于DSP 和帧内编码的农机避障系统,主要任务是让农街在作业过程中,采用帧内编码和图像处理技术对视频图像进行分析与处理,对作业区内的障碍进行智能避绕。
视频图像的处理具有数据量大、精度高和耗时长的特点,需要具有强大运算能力的处理器进行图像处理, 本文采用了TI 公司生产的TMS320DM643 处理器作为处理核心, 该芯片专用于数字媒体和图像处理应用, 其工作主频可达600 MHz, 处理性能高达4 800 MIPS,2个20 位的视频口,具有8 路同步串行输入/输出的McASP 端口, 可实时实现多路音频/视频信号的输入/输出及编解码运算。DSP 高速视频图像处理系统框架如图2所示。
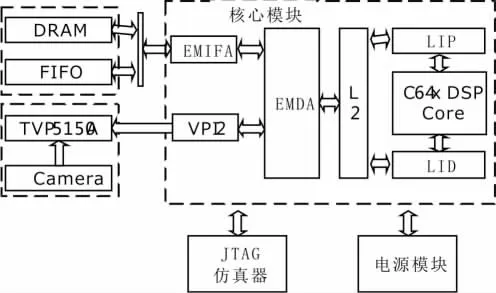
图2 嵌入式高速数字图像处理系统框图
3 DSP 高速视频图像处理系统软硬件设计
3.1 系统硬件设计
DSP 高速视频图像处理系统的核心是DSP 处理器单元和图像采集单元。其中,图像采集单元包括Camera 和视频解码器两部分,其作用是将从Camera 采集来的视频图像数据进行采样、量化得处理,为视频解码器提供原始样本。DSP 处理器和视频解码器连接的示意如图3所示。
3.2 系统软件设计
基于DSP 和帧内编码的农机避障系统,结合数字图像处理和帧内编码技术,其软件设计主要考虑图像处理和帧内编码算法的精确性和可靠性。软件的开发设计采用TI 公司推出的用于开发DSP芯片的集成开发环境CCS。软件完成对DSP 处理器外设、工作方式和相关寄存器的配置等设置后,会开启视频图像采集线程;视频图像采集完成后, 会根据需求将图像进行帧内编码处理, 然后又DSP 处理器对目标果实进行等级分类。软件算法流程如图4所示。
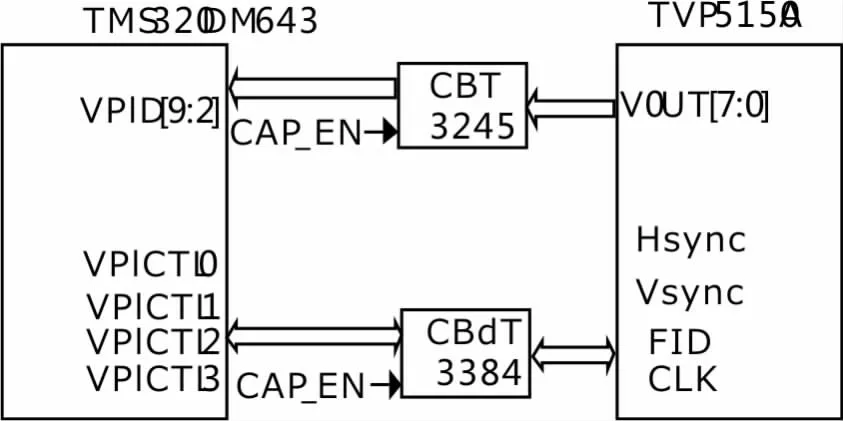
图3 DSP 处理器和视频解码器连接图
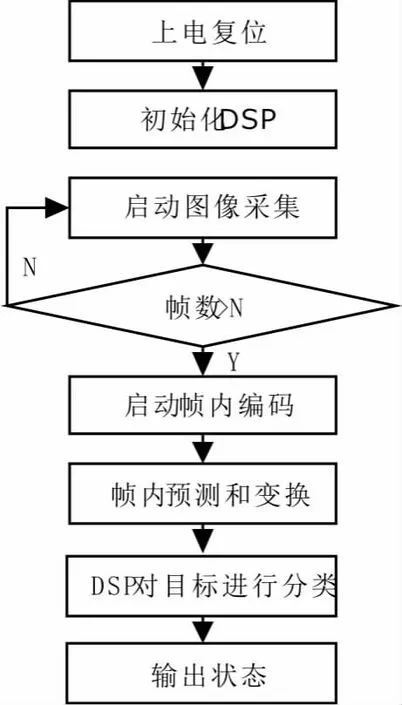
图4 软件算法流程图
4 避障控制策略的实现
农机在实际的作业中可能会经常会碰到障碍物,因此需要进行避障处理。农机避障控制系统是通过避免机器人在其路径中与障碍物(其本质上是静态的)碰撞来确定机器人从其工作空间中的当前位置到目的位置。本文进行的农机避障系统统一采用以下假设进行分析处理。假设如下:
(1)对于农机,当前位置和目标位置在给定的参考坐标系中是已知的;
(2)农机可以从一组固定的动作中选择给定时间内的任何移动策略;
(3)农机分步执行其操作,直到气机器人到达目标位置。
为满足给定的假设,避障系统遵循以下原则:
(1)首先,为了确定下一个目标位置,农机会尝试将其前进方向与目标对齐。
(2)在对准过程中,可能导致与前进道路中的障碍物碰撞,因此,农机必须将其前进方向向左或向右转动预定角度以避开障碍物。
(3)若农机可以在没有碰撞的情况下与目标位置对齐,那么将不需要进行避障。
(4)如果向左或向右旋转航向方向,则需要机器人围绕z 轴旋转相同的角度,如果它被捆绑,则随机打破。
考虑农机在时间t 的初始位置是(xi(t)),yi(t)),同一个机器人的下一个位置(t+δt)是(xi(t+δt),yi(t+δt)),vi(t)是农机Ri的速度,并且是农机Ri的目标或目标位置,如图5所示。
从图5可以看出,农机下一个目标位置(xi(t +δt),yi(t+δt))的表达式如下:
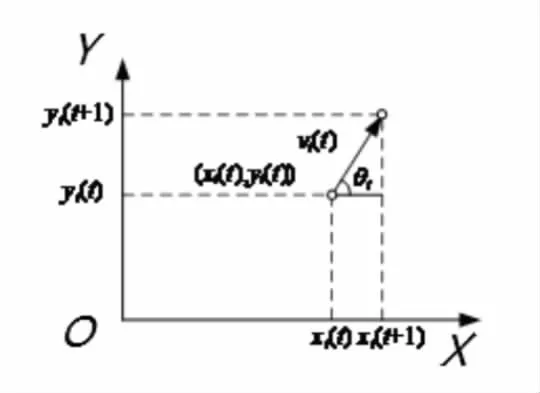
图5 农机从当前位置i 到下一个位置

当δt =1,式(3)和式(4)可以转换为:

首先考虑,农机当前位置为(xi(t),yi(t)),下一个目标位置(xi(t+δt),yi(t+δt)),这样在两点之间的连接,不应触及地图中的障碍物,如图6所示。
通过形成约束来最小化从当前位置到目标位置的总路径长度,而不触及障碍物,然后,根据目标函数fit1确定农机的轨迹长度,fit1为:

图6 农机避障示意图

公式(5)为线性模糊的目标函数约束,可以防止农机与障碍物的碰撞,用于评估路径中存在的障碍物。
5 实验测试与结果分析
为了验证农业机器人运动定位和避障的可行性,本文采用Matlab 仿真软件进行了仿真与分析。农业机器人在实际作业过程中,对自身定位和障碍物检测是实时的,所以本文以前面5 m 范围的障碍物对避障方位。试验仿真结果如图7所示。
从图7可以看出,农机的上方障碍物较多,因此农机向右转弯,计算到障碍物外切圆的圆心位置后,农业机器人以起点、障碍物外切圆和终点的连接线作为农业机器人的避障路线。实验结果表明:农机从起点成功到达终点,算法路径为最优避障路径,证明了系统的准确性和可行性。

图7 Matlab 仿真结果图
6 结论
本文成功的基于祯内编码和DSP 图像处理设计了一种路径规划控制方案, 设计了农机自动避障策略,研究了系统的软硬件设计,同时利用MATLAB 仿真软件对该系统进行避障仿真模拟,证实了系统的可靠性和可行性。
