基于单片机的智能循迹小车设计
2019-05-21刘晨,崔斌
刘 晨,崔 斌
(河南工学院,河南 新乡 453000)
在当今时代智能化机器人越来越成为国家发展的焦点。智能化机器人在各行各业都开始普及应用。许多国家把智能化机器人作为创新教育,科技发展的竞争手段。智能化小车也快速发展,以单片机为核心,融合了计算机技术、自控技术、机械制造等多个学科。智能化小车可以用在工业控制、家庭玩具、救灾排爆等多个领域。本文就讨论智能化小车的设计思路与设计原理,着重于智能化的实现与控制,小车可以通过传感器来获取采集信息,通过串口传到单片机进行控制,实现循迹与躲避障碍的功能,也支持红外遥控。
1 整体设计
系统以单片机为核心控制器件,分成不同的模块,包括小车驱动模块、红外遥控模块及循迹模块。通过不同的传感器采集数据传递给单片机处理执行相应的命令实现相应的功能。
2 模块设计
2.1 小车驱动模块
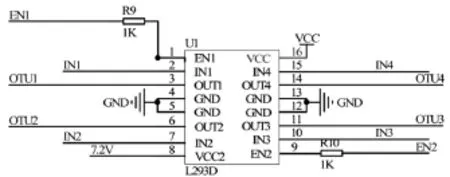
图1 L293D芯片外接示意图
小车的驱动模块是由专门的电机驱动芯L293D片来进行驱动的,该芯片属于双H桥集成电路,该电路的输出端与单片机相连。通过单片机的输出信号控制该芯片的输出端的高低电平即可控制电机的正转反转。其中IN1和IN2控制左电机,IN4和IN5控制右电机。
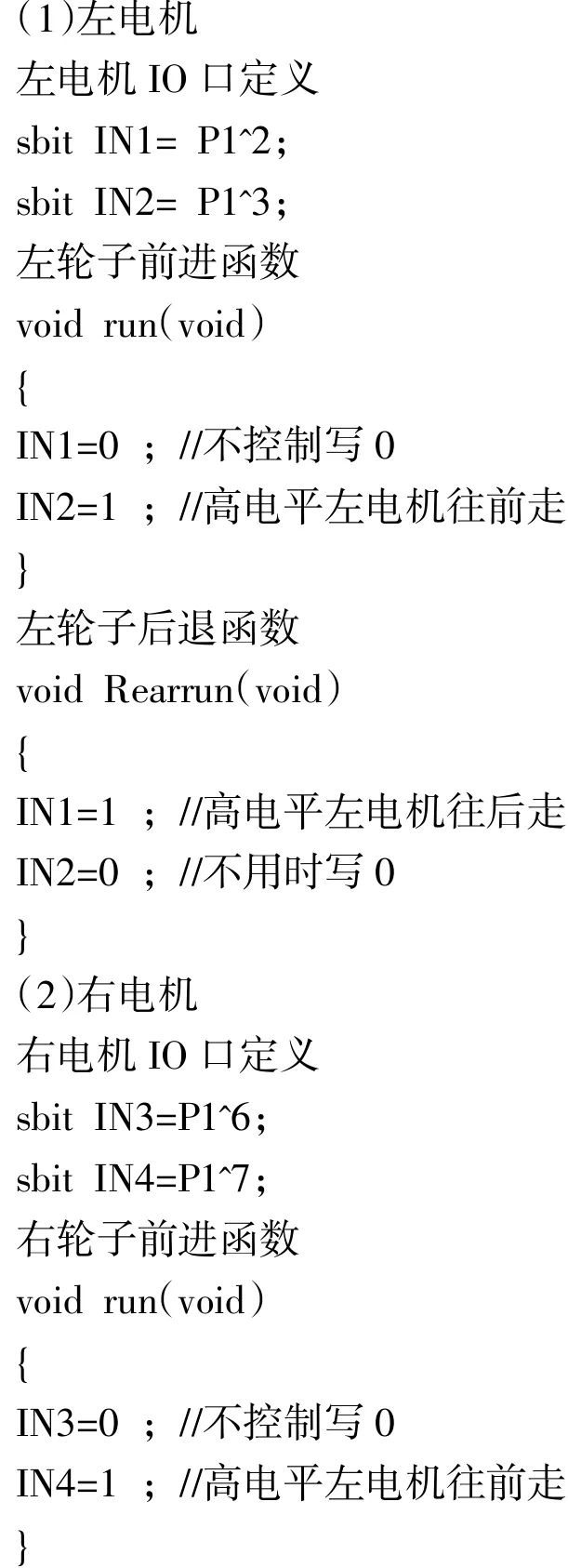
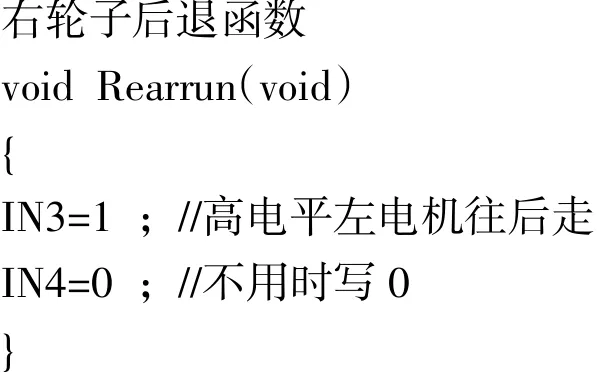
2.1.1 单个电机进行测试
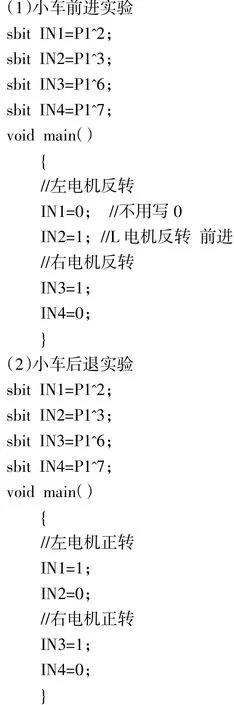
2.1.2 小车前进与后退实验
2.1.3 小车的转向与停止实验



2.1.4 智能小车的按键启动
通过独立按键来启动智能小车
2.1.5 小车电机速度控制
对于电机的转速调整,采用脉宽调制(PWM)办法,控制电机的时候,电源并非连续地向电机供电,而是在一个特定的频率下以方波脉冲的形式提供电能。不同占空比的方波信号能对电机起到调速作用,这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上,这样,改变在始能端EN1和EN2上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了转速。
2.2 舵机云台
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20 ms,宽度为1.5 ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0~180度。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20ms(50 Hz),理论上脉宽分布应在1~2ms,但是,事实上脉宽可由0.5~2.5 ms,脉宽和舵机的转角0°~180°相对应。有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。

2.3 循迹模块
循迹是指小车沿着赛道进行循迹运动。比如餐厅中的送餐机器人,规定轨道上运行的都是循迹机器人。循迹小车比赛的赛道底色一般为白色,用黑色表示赛道。常用的循迹方法有红外对管循迹法,摄像头循迹法,激光管循迹法。本系统采用的是红外对管循迹法。红外对管循迹方法是利用红外线照射后,黑,白线对红外线吸收作用不同为原理的循迹方法。相对于摄像头循迹法和激光管循迹法造价便宜。使用三个红外线发射器与接收器,一个传感器放在黑色循迹路线上,剩下两个传感器发在中间传感器的两侧。正常情况下,智能小车朝着黑色循迹路线行驶,中间的红外线发射反射回的光基本都被黑色吸收,而两边的红外线发射器发射出的红外线经过白板大部分被反射回来。一旦小车出现偏离,这时候就会有一边的红外线发射器发射出的红外线被黑色吸收,返回的光被吸收很多,返回信号变弱,通过比较器LM324采集高电平与低电平。这样就可以检测到智能小车偏离了轨道,通过单片机的控制自动回归正常的轨道。
以最简单的两个红外探测头为例两个传感器放在小车两端,黑色循迹线的两边。当左边的传感器检测到没有信号返回则说明小车向右偏离轨道,此时需要小车向左转回归轨道。当右边的传感器检测到没有信号返回则说明小车向左偏离轨道,此时小车需要向右转回归轨道。编程如下:

2.4 避障模块
2.4.1 红外线避障
用红外光电传感器,探测到物体即输出脉冲,输入到单片机中处理一下,再对电机驱动模块进行控制,实现壁障的功能,这样的避障小车又称为简单的避障机器人。
小车避障的原理:
(1)利用障碍物对光线的反射率大这个特点,当前面的有障碍物时,传感器发射出去的红外光被大部分反射回来。于是传感器输出低电平0,点亮L3、L4灯。
(2)当前面中没有障碍物时,传感器在小车上方,因传感器反射能力很弱,反射回来的红外光很少,达不到传感器动作的水平,所以传感器输出1。
(3)只要用单片机判断传感器的输出端是0或者是1,就能检测到避障碍。
编程如下:


2.4.2 超声波避障
超声波是一种频率比较高的声波,通过传感器发送超声波然后遇到障碍物返回所用的时间乘以声波波速除以二得到距离。智能小车采用超声波模块HC-SR04。一个控制口发一个10US以上的高电平,就可以在接收口等待高电平输出。一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离。如此不断的周期测,就可达到移动测量值。

//此时time的时间单位决定于晶振的速度,外接晶振为11.0592MHz时,
//time的值为0.54 us*time,单位为微秒
//但是,现在计算的是从超声波发射到反射接收的双路程,
//所以将计算的结果除以2才是实际的路程
S=time*2;//先算出一共的时间是多少微秒。
S=S*0.17;//此时计算到的结果为毫米,并且是
精确到毫米的后两位了,有两个小数点
Delay1ms(5);//发现小车自动复位的时候,可以稍微延长一点这个延时,减少电机反向电压对电路板的冲击。

2.5 红外遥控模块
通用红外遥控系统由发射和接收两大部分组成,应用编/解码专用集成电路芯片来进行控制操作,如图2所示。
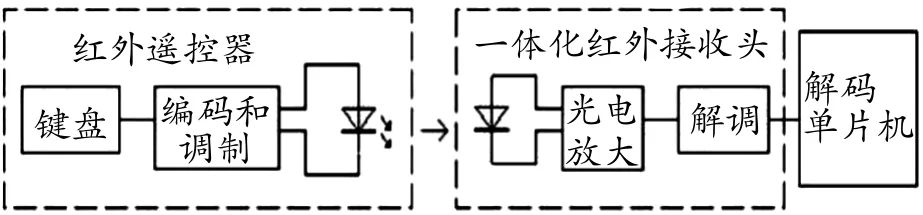
图2 红外遥控器系统结构图
3结语
智能小车采用模块化设计,对各个模块进行编程实现,最后将所有模块合在一起,实现智能小车运动功能、循迹功能、避障功能、红外遥控功能。通过电机控制智能小车的前进、后退、转弯、停止的基本功能;通过红外传感器完成了在黑色轨道上循迹的功能;通过红外传感器和超声波实现避障功能;通过红外遥控系统完成红外遥控的功能。所有功能综合在一起完成了一个完整的智能小车的功能。
