一种单自由度3T1R并联机构的拓扑设计及其运动学
2019-05-18沈惠平朱小蓉李云峰
沈惠平 吕 蒙 朱小蓉 李云峰
常州大学现代机构学研究中心,常州,213016
0 引言
工业上许多场合需要结构简单、少驱动源但能产生空间复杂运动的空间机构。在提出、研制单自由度并联运动振动筛的基础上[1-3],笔者提出了“少输入-多输出”(Fi-Mo)并联机构的概念,建立了驱动输入数、自由度数、动平台输出运动个数(含独立和非独立元素)三者之间的数学模型[4],并提出了Fi-Mo机构的两种设计方法[5];据此,设计了大量少输入-多输出并联机构[6-8];进一步,发明并设计了基于单自由度三转动输出并联机构的肩关节康复训练机[9]、并联式脚底按摩机[10]以及多种输出形式的并联振动筛[11],为其他新型节能装备的设计、研发奠定了理论基础。单自由度的Fi-Mo机构是一种新型并联机构[4-5],因其驱动元件少、造价低、结构紧凑,所以有着较高的实用价值和应用前景,但目前对Fi-Mo并联机构的运动学、动力学研究还较少。
本文提出了一种新型的单自由度三平移一转动(3T1R)并联机构,分析了该机构的方位特征(position orientation characteristic,POC)、自由度(DOF)及耦合度κ等拓扑特性,导出了其运动位置正逆解、速度与加速度公式,此外为该机构用于产生3T1R的振动筛分装置进行了3D虚拟样机设计。
1 机构设计
本文提出的单自由度3T1RFi-Mo并联机构如图1所示,它由静平台0、动平台1以及连接两平台 之间的 一条混 合支链(hybrid single-openchain,HSOC)HSOC1和一条简单支链组成,其中,混合支链由支链Ⅰ(即 R11‖R12-P(4R))和支链Ⅱ(即 R21-P(4R)-R22)并联连接后,与转动副 R13串联而 成,可 表 示 为 R11‖R12-P(4R)‖R22-P(4R)-R21)-R13,其中,P(4R)表示由4个 R 副组成的平行四边形等效产生的一个P副,其末端构件(动平台1的一部分)输出为三平移一转动;而简单支链Ⅲ为 R31-S32支链。
静平台0上转动副R11、R21的轴线和动平台1上的R13轴线平行;转动副R31的轴线平行于R11R21的连线。
2 机构的拓扑分析
2.1 机构POC集分析
(1)串联、并联机构的POC集方程[12]分别为
式中,MJi为第i个运动副的POC集;Mbi为第i条支链末端的POC集;MPa为机构动平台的POC集。
(2)选取动平台上1的任意一点为基点p。
(3)确定支链末端构件的POC集。由第1节可知,混合支链HSOC1是由支链Ⅰ、支链Ⅱ并联后,与转动副R13串联而成,由式(1),它们产生的POC集分别为

由式(1)、式(2),有
(4)确定动平台的POC集。由式(2),得则动平台1可产生3个平移及1个绕转动副R13轴线的转动。

2.2 自由度计算
(1)并联机构的全周自由度公式[12]为
式中,F 为机构自由度;fi为第i个运动副的自由度;m为运动副数;v为独立回路数(v=m-n+1,n为构件数);ξLj为第j个独立回路的独立位移方程数;dim为POC集的维数为前j条支链组成的子并联机构POC集;Mb(j+1)为j+1条支链末端构件的POC集。
(2)确定各回路的独立位移方程数。此机构可分解为两个独立回路,即单开链(single open chain,SOC)SOC1{R11‖R12-P(4R)‖R22-P(4R)‖R21}和SOC2{R31-S32-R13}。其独立位移方程数计算方法如下:
①支链Ⅰ、Ⅱ组成第1个独立回路,由式(4)可得
由式(2),该子并联机构的POC集为
由式(3),该子并联机构的自由度为

则子并联机构的输出仅有2个独立运动。
②上述子并联机构、R13及单开链SOC2组成第2个回路,由式(4)可得
(3)确定该并联机构的自由度。由式(3),得

当转动副R11为驱动时,动平台1产生3个平移及1个绕转动副R13轴线的转动,但其中仅有1个独立运动,其余3个运动为寄生运动。注:自由度计算时,如将该机构视为仅包含前述的产生3T1R的混合支链HSOC1和简单支链Ⅲ组成的一个独立回路,即混合支链等效于)支链。显然,该回路的独立位移方程数ξ=6。由式(3)得

显然,自由度计算时,采用等效支链替代部分复杂支链自由度计算较为简单。
2.3 机构耦合度计算
(1)由基于单开链SOC的机构组成原理[12]知,任一机构可分解为一系列单开链,而第j个单开链SOCj的约束度为
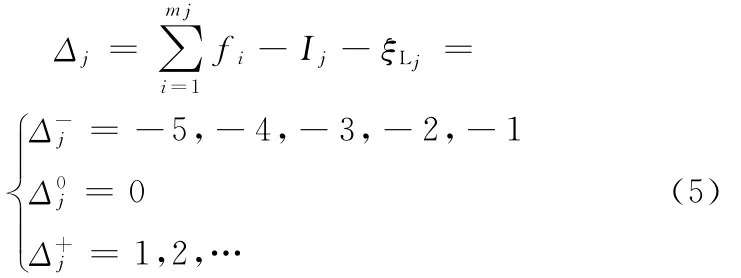
式中,mj为第j个单开链SOCj的运动副数;fi为第i个运动副的自由度(不含局部自由度);Ij为第j个单开链SOCj的驱动副数。
进一步,一组有序的v个SOC可构成一个独立回路数为v的基本运动链 (basic kinematics chain,BKC),对一个BKC而言,须满足
(2)2.2节中已求得两个回路的独立位移方程:ξL1=4,ξL2=6,则由式(5),得SOC1、SOC2的约束度分别为
于是,耦合度

该并联机构仅包含一个基本运动链,其耦合度为1,可用基于序单开链法的一维搜索法来求解该机构位置正解。
3 运动学分析
3.1 建立坐标系
如图1所示,该机构静平台0是由转动副R11、R21、R31为顶点的等边三角形。动平台1上的转动副R13、球副S32分别位于构件1的两端点。在静平台0的几何中心处o建立固定坐标系oxyz,x轴垂直于R11R31连线且过R21,y轴平行于R11R31的连线,z轴由右手笛卡儿坐标系法则确定;在动平台1的中点p建立坐标系puvw,v轴为R13S32连线,u轴垂直于v轴,w轴由右手笛卡儿坐标系法则确定,其运动学模型如图2所示。
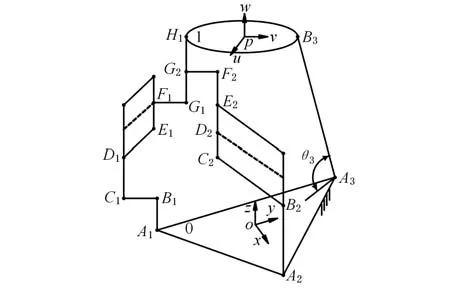
图2 单自由度3T1R机构的位置计算简图Fig.2 Position calculation sketch of 1-DOF 3T1RPM
该机构的结构参数如下:lA1A2=lA2A3=lA1A3=l1,lH1B3=l2;其余杆长分别为lA1B1=lC1D1=0.5l3;lA2B2=l3;lD1E1=lB2C2=l4;lE1F1=lC2D2=0.5l5;而lG1G2=l5;lG2H1=l6;lA3B3=l7;lB1C1=r1、lF1G1=r2、lF2G2=r3(为简化计算,长度为ri的杆长都与静平台平行,杆F1G1和杆F2G2都和各自的平行四边形共面)。
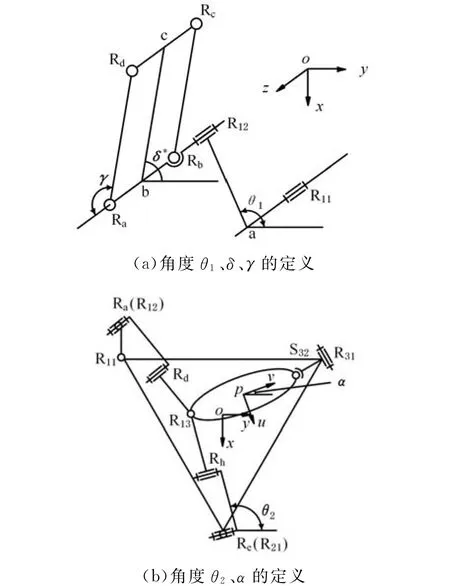
图3 各角度的定义Fig.3 Definition of angles
各角度定义如下(图2、图3):B1C1与y轴正向的夹角为输入角θ1,F2G2与y轴正向的夹角为θ2;A3B3与静平台的夹角为θ3;D1E1在静平台上的投影与y轴正向的夹角为虚拟输入角δ*;D1E1与z轴正向的夹角为γ。动平台p的坐标为(x,y,z),v轴与x轴正向的转角为动平台姿态角α。
3.2 基于序单开链的机构位置正解求解原理
因机构包含的任一BKC可分解为约束度为正值、零、负值3种形式的单开链,因此,机构位置正解的求解可转化为3种单开链的位置求解,而3种单开链的约束特性及其建模方法如下。
(1)约束度为正值的SOC(Δ+i)会使机构自由度增加Δ+i;为确定其运动,需在约束度为正值的SOC(Δ+i)上设定Δ+i个虚拟变量(Δ+i=κ)。
(2)约束度为零的SOCΔ0i()不影响机构自由度,其运动具有确定性,即其位置正解能独立求解。
(3)约束度为负值的SOC(Δi-)使机构自由度减少 Δi-,即对机构施加了 Δi-个约束方程(Δi-=κ)。
因SOC(Δi+)中的虚拟变量数目Δi+恰等于约束方程数目 Δi-,易建立含Δi+个变量的位置方程;之后可得到含一个变量的高次方程并求得其封闭解,或用一维搜索法直接求得数值解。
3.3 位置正解分析
位置正解问题归纳为:已知1个驱动输入θ1,确定动平台的位置p (x,y,z)和姿态角α。
3.3.1 在约束度Δ1=1的单开链SOC1上
在支链Ⅰ、Ⅱ上,分别求得G2点的坐标为
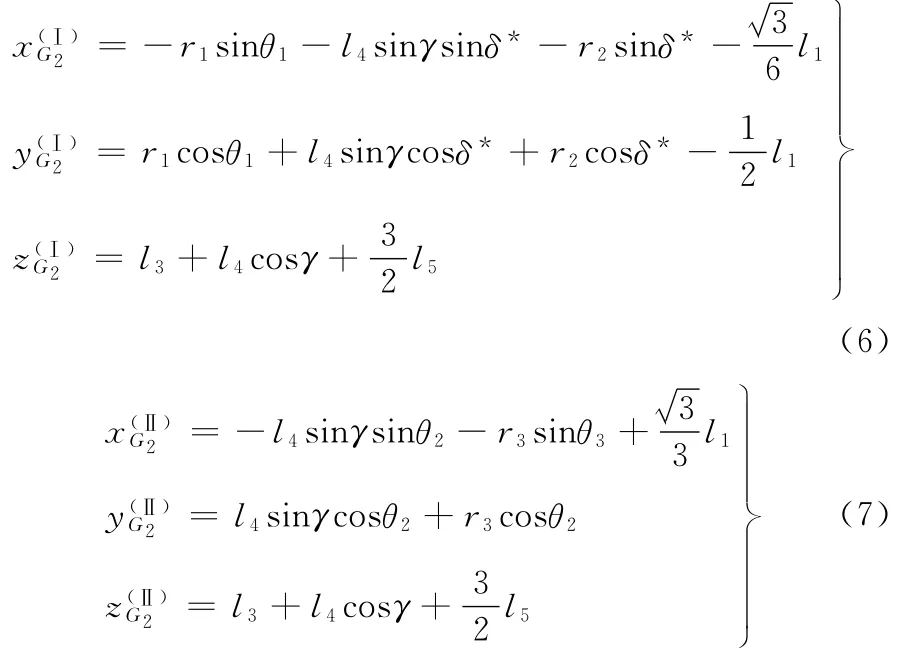
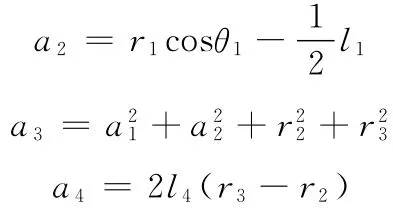
由式(6)、式(7)可得
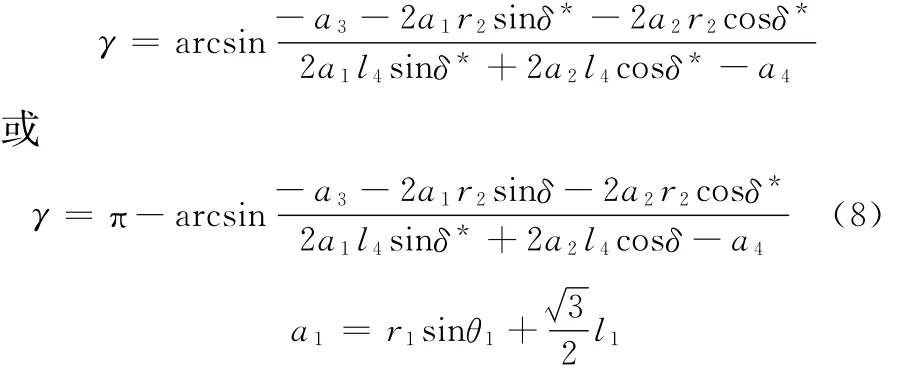
由式(8)可知,γ为虚拟输入角δ的函数。
3.3.2 在约束度Δ2=-1的单开链SOC2上
由支链Ⅰ、Ⅲ,分别求得p点的坐标为
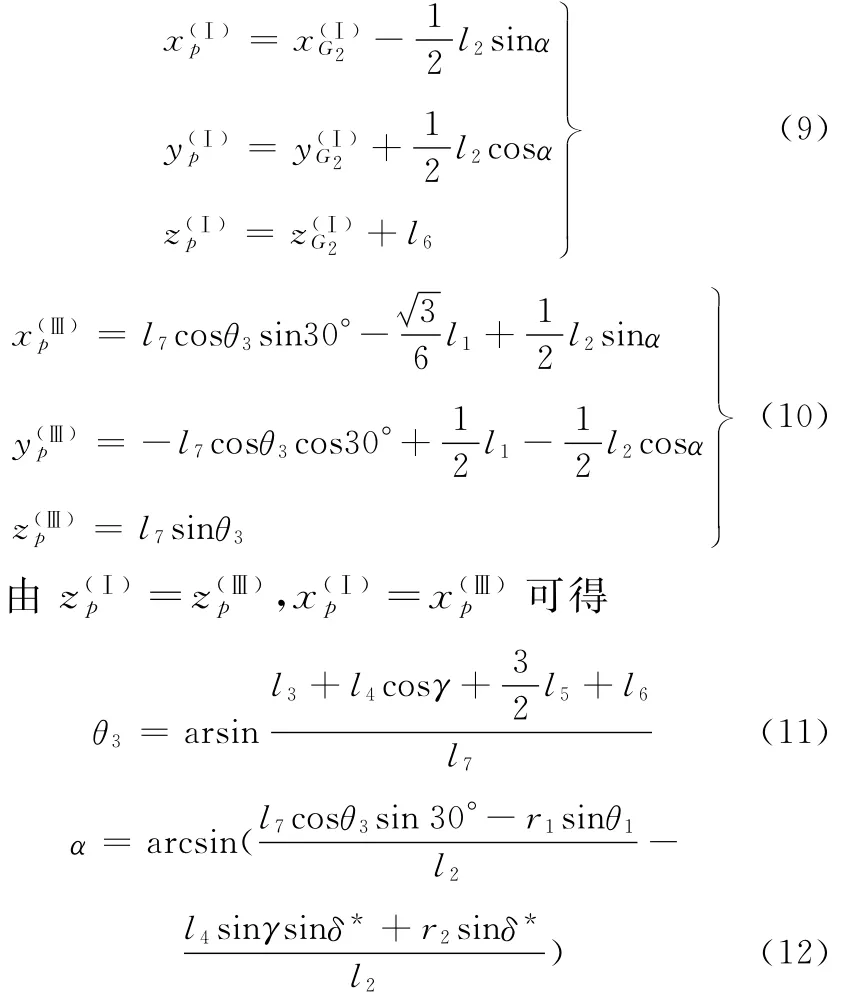
由式(11)、式(12)易知,θ3、α 也为虚拟输入角δ的函数。进一步,由,得

将式(8)、式(11)、式(12)代入式(13),可得到只含有虚拟变量δ*的方程;通过不断改变δ*的值,找到满足f(δ*)=0的真实δ*所有解。最后,将真实的δ*代入式(10)、式(12),可得到动平台位置p(x,y,z)和姿态角α。
3.4 位置逆解分析
机构反解问题为:已知动平台的位置p(x,y,z)及姿态角α,求驱动副的输入角θ1。由位置正解式(9),可得到

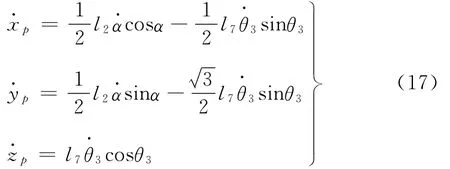
3.5 速度分析
机构速度问题可描述为:已知驱动副R11的转速θ·1,求动平台的质心p的线速度v及角速度α。分别令式(6)、式(7)相等以及式(9)、式(10)相等,并对时间求导,消元化简可得
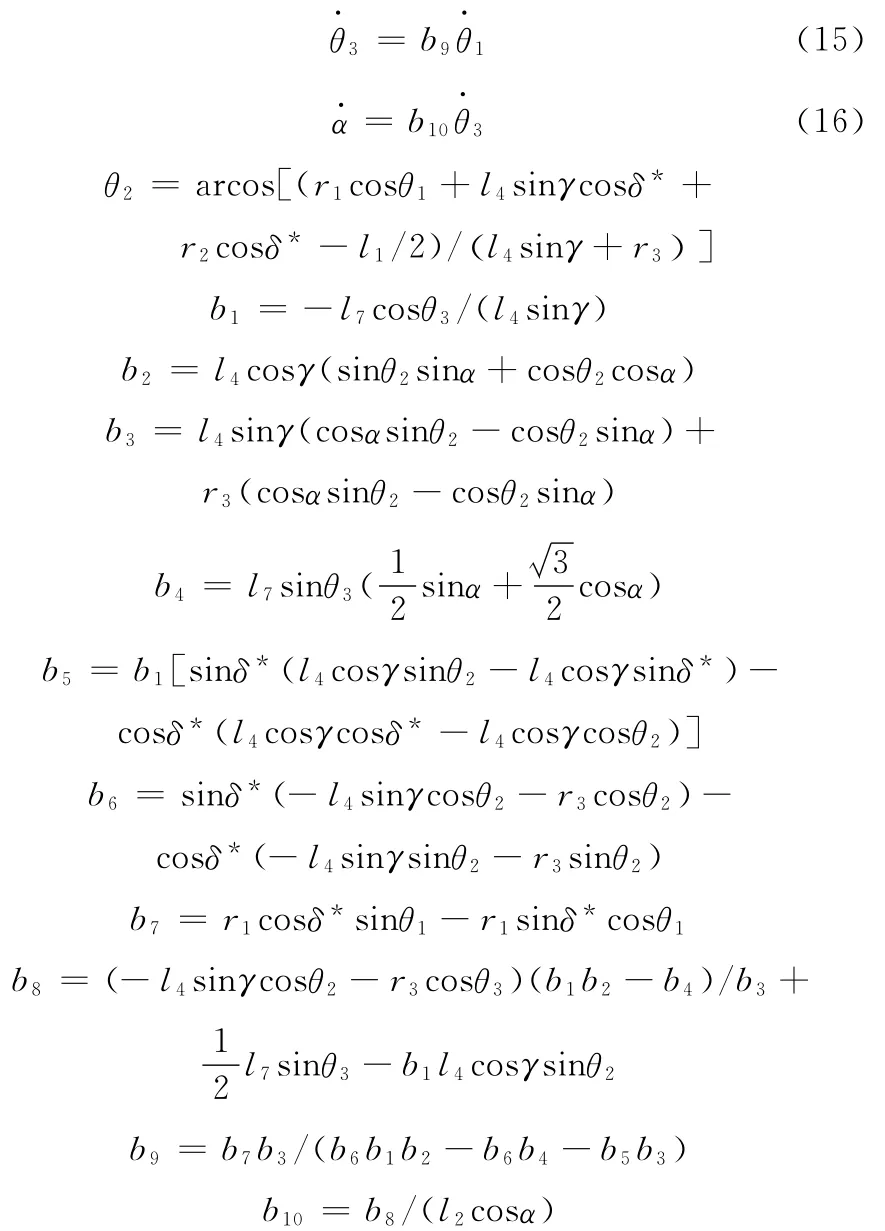
对式(10)求导,可得
由式(16)、式(17)即可得到动平台的质心速度及其角速度。
3.6 加速度分析
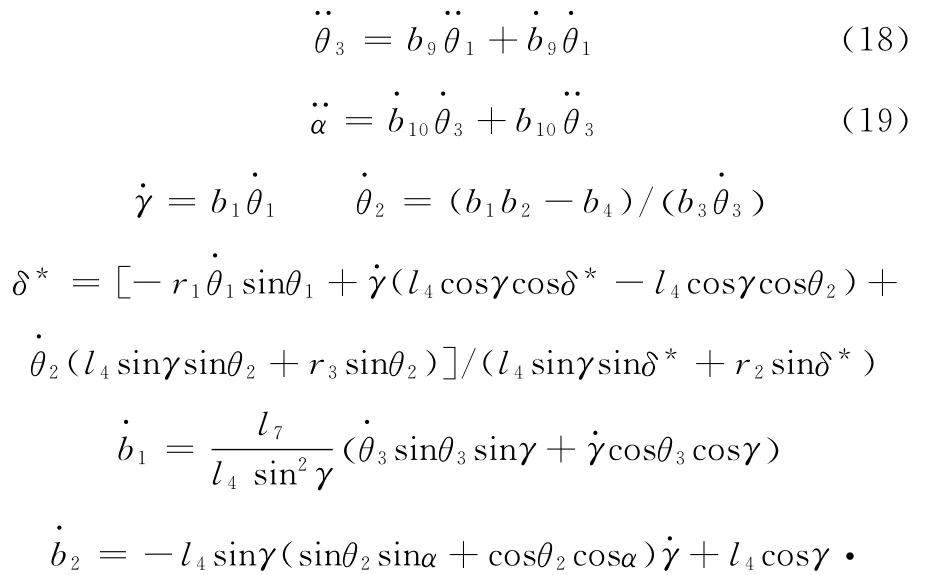

对式(17)求导可得
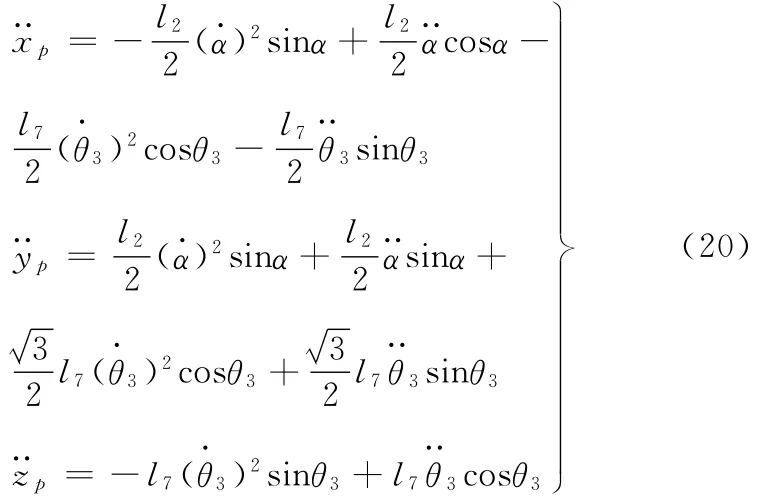
由式(19)、式(20)即可得到动平台的质心加速度及角加速度。
4 计算实例
4.1 位置正反解算例
设该并联机构的结构参数如下:l1=250 mm;l2=88mm;l3=81.75mm;l4=120mm;l5=24mm;l6=17mm;l7=180mm;r1=29.75 mm;r2=30mm;r3=45mm;设输入角θ1=30°,由一维搜索法可得两组实数正解,见表1,对应的装配构型如图4、图5所示。

表1 位置正解数值Tab.1 Numerical values of direct kinematics
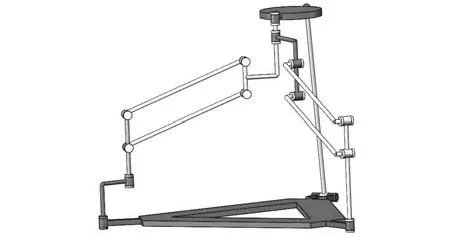
图4 位置1对应的装配构型Fig.4 Assembly configuration of Position1
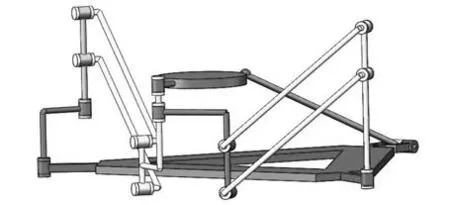
图5 位置2对应的装配构型Fig.5 Assembly configuration of Position2
将正解1数据代入式(13),得其中一组解为θ1=29.998 2°,从而验证了正反解的正确性。
4.2 速度和加速度算例
用ADAMS进行运动仿真,也可得到该机构动平台p的速度与加速度曲线,见图6、图7所示。
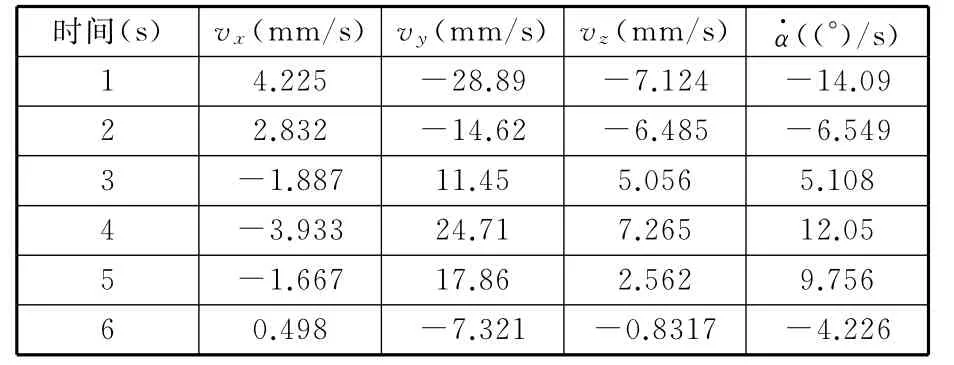
表2 动平台的速度分析Tab.2 Velocity of moving platform
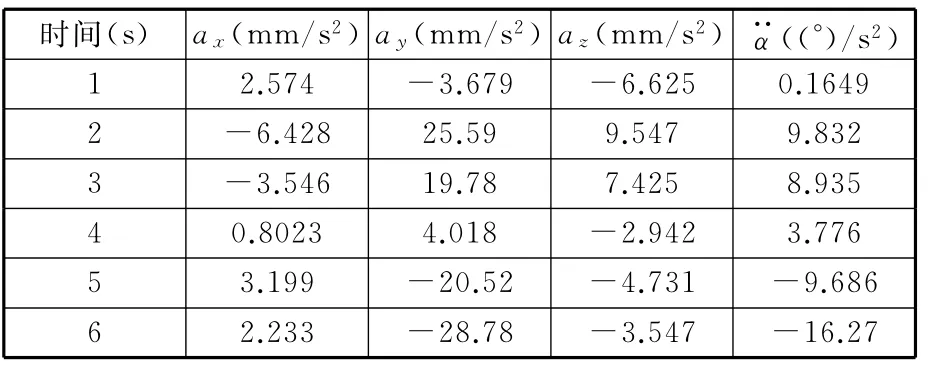
表3 动平台的加速度分析Tab.3 Acceleration of moving platform
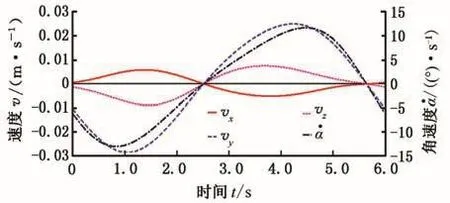
图6 动平台的速度曲线Fig.6 Velocity curve of moving platform
由表3知:由加速度公式(20)得到的数值(t=2s时,ax= -6.428mm/s2;ay=25.59 mm/s2;az=9.547mm/s2;α··=9.832(°)/s2),与加速度仿真曲线(图7)得到的数值(t=2s;ax=-6.5mm/s2;ay=25.7mm/s2;az=9.7mm/s2;α··=9.633 7(°)/s2)基本一致,故速度、加速度导出公式正确。
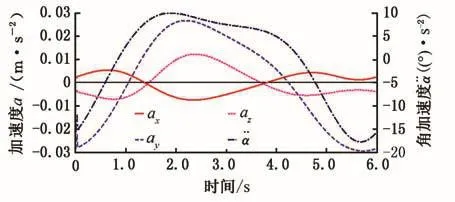
图7 动平台对应的加速度曲线Fig.7 Acceleration curve of moving platform
5 并联振动筛的虚拟样机
单自由度3T1R并联振动筛的样机设计如图8所示,它包含静平台0、动平台1、由支链Ⅰ和支链Ⅱ组成的混合支链、RS型支链Ⅲ以及驱动系统5大部分,可用SolidWorks分别建立其CAD设计模型。
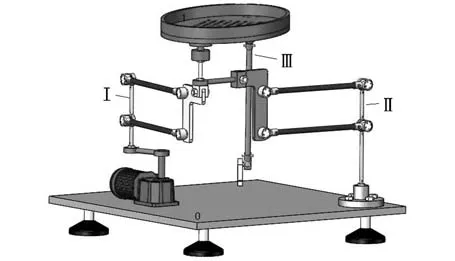
图8 单自由度3T1R并联振动筛虚拟样机Fig.8 Virtual prototype of 1-DOF 3T1R parallel vibrating screen
为了保证振动筛有足够的刚度和强度,支链Ⅰ、Ⅱ的平行四边形及支链Ⅲ采用密度小、强度高、易加工的铝合金;同时,在与转动副R22连接的短边2处宜采用铝板,从而保证它能传递一定的转矩而不变形,如图9所示。筛分装置的静平台为长方形钢板,椭圆形筛箱为动平台,其长半径方向为筛分物料的给料方向。
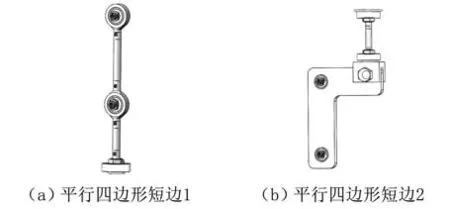
图9 并联机构支链结构设计Fig.9 Design of the limbs
6 结论
(1)提出了一种低耦合度(κ=1)的单自由度3T1R并联机构,该机构结构简单、驱动源少,可用于振动筛分机构。
(2)根据序单开链法的运动学建模原理,建立了一个含1个变量的机构位置正解求解方程,并运用一维搜索法得到了该机构的位置正解。
(3)根据导出的正解公式,导出了该机构的速度与加速度公式,并运用ADAMS软件仿真验证了机构的速度与加速度曲线。
(4)给出了基于该单自由度并联机构的3T1R维并联振动筛的虚拟样机设计。
本文工作为该3T1R并联振动筛的优化、机械结构设计及制造、动力学分析提供了一定的参考。