基于LuGre模型的转子压缩机滑片-滑槽运动副摩擦力测试
2019-05-18耿葵花耿爱农王少伟李辛沫
韦 为 耿葵花 耿爱农 王少伟 李辛沫
1.广西大学机械工程学院,南宁,530004 2.广西制造系统与先进制造技术重点实验室,南宁,530004 3.五邑大学机电工程学院,江门,529020
0 引言
建立摩擦模型是定量分析机械系统摩擦行为的基础,迄今为止,人们已建立的各种摩擦模型有数十种之多,包括静态摩擦模型和动态摩擦模型两大类,其中经典的静态摩擦模型有库仑摩擦模型、Stribeck摩擦模型和Karnopp摩擦模型等,而动态摩擦模型的代表主要有Dahl摩擦模型和LuGre摩擦模型等。以上模型的建模方法及适用对象各不相同,在表达形式上更是差别很大[1-2]。动态摩擦模型对不断变化运动模式的摩擦副能显现出较好的表达性和准确性,但它们却普遍拥有非线性的特征,反映在建模上就是对其参数的辨识十分困难。以CANUDAS等[3]提出并获得广泛认可的LuGre摩擦模型为例,在该模型中需要辨识的关键参数就多达6个。
陈东宁等[4]通过实验测试间接得出摩擦数据,运用数据拟合方法辨识出修正黏性摩擦LuGre模型的静态和动态参数。孙炳玉等[5]搭建了基于比例阀压力控制的动态电液测力系统,依据实验数据及动静态参数辨识模型辨识得到动静态参数。王三秀等[6]针对伺服机械手系统的LuGre摩擦模型参数辨识难、难以建立其精确数学模型的问题,利用径向基函数(RBF)神经网络的万能逼近特性逼近LuGre摩擦模型。贺莹等[7]在实验的基础上,利用最小二乘法和频响法对LuGre摩擦模型的静态参数和动态参数进行辨识。为了降低参数辨识的难度,人们根据高速轴和低速轴摩擦环境的近似性,建立了单关节系统简化摩擦模型。谭文斌等[8]提出了以稳态误差分析为基础的模型参数辨识方法。向红标等[9]提出了一种基于LuGre模型的自适应摩擦补偿方法。谭文斌等[10]针对自适应摩擦补偿对未知建模误差和扰动抑制能力较弱的问题,提出了一种基于修正黏性摩擦Lu Gre模型的自适应滑模摩擦补偿方法。综上,构建LuGre摩擦模型至今依然是棘手的难题。
转子压缩机是制冷空调系统的核心装置,有众多摩擦副,有的摩擦副还具有启停、往复的运动学特征,对于这类摩擦副,往往通过动态摩擦模型对它们的摩擦学行为进行描述。压缩机中的滑片-滑槽运动副具有高速短距往复运动的特点,运用LuGre模型可以描述滑片在尚未滑动时及静摩擦与滑动摩擦转换时的摩擦特性,以及可变的最大静摩擦力、预滑动位移、摩擦滞后等现象,但这6个参数的辨识需要以滑片摩擦力-速度曲线及滑片摩擦力-预滑移位移曲线为基础,再通过相关算法才能实现。本文设计了一套能够模拟滑片工况的摩擦力测试系统,分析了系统的可靠性,通过实验得到滑片与滑槽摩擦力-速度关系曲线和摩擦力-预滑移位移关系曲线,利用辨识出的参数代入模型计算出摩擦力理论值,将实验结果与数值计算结果进行对比,验证测试系统是否满足LuGre摩擦模型的参数辨识的实验要求。
1 建立滑片-滑槽LuGre摩擦模型
1.1 滑片-滑槽运动副工况特点
转子压缩机中的滑片相对于滑槽做周期性的往返运动,具有高速短距往复运动的特点,具体结构和运动受力如图1所示。滑片受到滑槽对它的摩擦力Ff和正压力FH的作用,FH与压缩机两腔气体压力密切相关。由于滑片与滑槽的配合间隙十分微小,其数值基本上都处在数微米的量级范围之内[11],故可忽略滑片二阶运动所造成的动力学影响。在此前提下,可认为滑片的两侧配合面所受到的滑槽正压力的数值均为FH。

图1 滚动转子压缩机结构Fig.1 Rolling rotor compressor
1.2 滑片-滑槽LuGre摩擦模型
参照文献[12-13],并结合滑片-滑槽运动副工况特点,可建立描述压缩机滑片侧面与滑槽摩擦力Ff的LuGre摩擦模型:

其中,Fc为滑动摩擦力,它与库仑摩擦因数μc成正比;Fs为最大静摩擦力,它与静摩擦因数μs成正比;vs是Stribeck速度,其值与正压力FH关系不大,可将其取为常数;σ0指鬃毛刚度,它只与材料本身的属性、织构等有关,在同一室温条件下,其值不受正压力的影响;σ1是阻尼系数,主要与材料特性和温度相关,受正压力值的影响也很小,因此,在建模时σ0和σ1这两个参数在正压力FH不变的情况下可取为固定值;σ2是黏性摩擦因数,正压力FH对它有显著的影响;σ50是辨识系统在正压力FH=50N下的黏性摩擦因数,F50则是辨识系统在50N的正压力下所派生的库仑摩擦力,其中50N的取舍与建模对象所处的实际运行工况相关;λ为黏性摩擦因数σ2与压力曲线的拟合系数;g(v)为大于零的函数且有界,其量纲具有力学性质;z为鬃毛的平均位移,可在一定程度上反映配合表面的微观几何形貌;v为滑片相对于滑槽的速度,它反映了模型的动态特征属性。
根据式(1)~式(7),并结合图1可知,由LuGre摩擦模型描述的摩擦力Ff是一个关于滑片位移与速度的变量,事实上它还涉及运动副两配合面的一些几何形貌特征,同时它还关联到间隙内部油膜的物性参数,对于存在变速、变向和止点的压缩机滑片-滑槽运动副,LuGre摩擦模型是一个较为全面和恰当的描述模型。而σ0、σ1、σ2、μc、μs、vs这6个参数的识别成为建立 LuGre摩擦模型的关键,它们通常需要结合实验来辨识与获得[14-15]。
2 压缩机滑片摩擦力测试系统
2.1 摩擦力测试系统的组成和主要功能
摩擦力测试系统如图2所示,它主要包括运动等效装置、传动装置和测量装置3个部分。①运动等效装置主要包括模拟滑槽、压缩机滑片以及包括行星减速器、滚珠丝杠在内的驱动装置等,目的是提供与压缩机运转工况相符的滑片-滑槽运动环境。由于实际压缩机滑片-滑槽运动副的几何尺寸的限制,无法直接在压缩机上进行摩擦力的测试,为保证测试过程和测试结果的等效准确性,模拟装置中的滑槽及滑片,在结构尺寸、装配关系、材料、加工精度、形位公差、运动关系、滑片位移、速度、受力情况等均参照压缩机样机的实际参数进行设计和加工。因此,通过等效装置试验识别得到的LuGre摩擦模型,可以作为计算实际的转子压缩机滑片-滑槽运动副的摩擦力较为可靠的参考。②测量装置包括压力传感器、加载力传感器、控制柜、计算机等,其功用主要是施加可控的、与压缩机运转工况相符的或者可等效转换的各种变量,如作用在滑片配合面上的压力载荷FH、滑片相对于滑槽的匀速运动速度vc等。③测量装置具备采集数据和处理数据的能力。

图2 摩擦力测试系统和装置实物图Fig.2 Friction test system and device physical map
该系统可模拟压缩机滑片与滑槽的往复运动关系,亦可实现滑片在不同速度下和不同载荷下的匀速直线运动,并且可以模拟压缩机两腔气体力对滑片均匀加载相应的正压力FH。系统各主要硬件参数见表1。

表1 测试系统主要硬件组成Tab.1 Test system main hardware components
2.2 滑片摩擦力测试系统工作原理
摩擦力测试系统受力图见图3,滑片组受到伺服电机的驱动力Fm,由于滑片组与滑槽接触,滑片同时受到与滑片运动速度v相反方向的摩擦力Ff以及由速度v引起的惯性力,据此可列出滑片组在水平方向的平衡方程:

其中,Fm为测试时压力传感器测得的压力;m 为滑片组的等效质量;x为滑片组的位移。当滑片组以速度vc做匀速直线运动时,惯性力为零,滑片受到的摩擦力Ff=Fm/2。

图3 摩擦力测试系统受力图Fig.3 Friction test system force chart
3 摩擦力测试系统分析
3.1 摩擦力采集区域
根据滑片所受气体压力的变化范围,选择加载力FH分别为10N、30N、40N和50N。利用三维分析软件Workbench对滑槽加载后的变形情况进行仿真分析。加载丝杠所加载压力FH为10N和50N时的滑槽变形情况见图4和图5。
由图4可知,当加载压力FH=10N时,滑槽的最大变形为0.4μm;由图5可知,当加载压力FH=50N时,滑槽顶部的最大变形为1.4μm,接近其表面粗糙度1.6μm,所以滑槽顶部的变形对摩擦力测试影响仍然不能忽略。
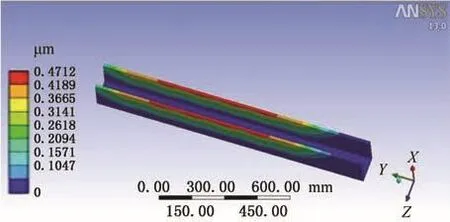
图4 FH=10N时滑槽的变形图Fig.4 Deformation diagram of the chute when FH=10N

图5 FH=50N时滑槽的变形图Fig.5 Deformation diagram of the chute when FH=50N
由图6可知,FH=50N时变形区域的变形在水平方向存在波浪式的起伏波动,顶部中间区域波动较明显,变形差值在0.16~0.32μm之间波动,中部中间区域在水平方向波动较小,变形差值为0.15μm左右,该区域水平长度为355mm,宽度为22mm,适合作为数据采集区域。因此,为了满足加载力均匀的要求,选择水平方向上的中部中间区域作为数据采集区域。
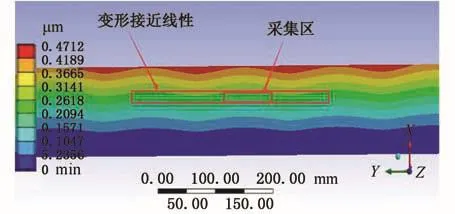
图6 摩擦力采集区的选择Fig.6 Friction collection area selection
3.2 摩擦力跃动现象分析
在无润滑的情况下,FH=50N时,滑片组以0.1mm/s的速度在加工的滑槽内做匀速运动,测试结果如图7所示,因为测试条件是无润滑状态,干摩擦运动无法连续平稳地滑动,而是断续滑动,所以观测到明显的摩擦力跃动现象。摩擦力周期性地增大和突降,每个周期增大的峰值基本一致,说明选择的摩擦力采集区域变形比较均匀。
有润滑的情况下,FH=50N时,滑片组以0.1mm/s的速度进行匀速摩擦力测试,结果如图8所示。摩擦力跃动现象明显减弱,但仍有微弱的跃动现象发生。这是由于运动速度较慢,表面接触时间延长,从而出现摩擦力爬行现象。

图8 摩擦力跃动现象(有润滑,FH=50N,v=0.1mm/s)Fig.8 Weakened friction(lubrication,FH=50N,v=0.1mm/s)
有润滑的情况下,FH=50N时,将滑片的运动速度增加到2mm/s,测试结果如图9所示,由于表面接触时间较短,润滑比较充分,摩擦跃动现象基本消失。
3.3 摩擦力测量重复性分析

图9 摩擦力跃动现象(有润滑,FH=50N,v=2mm/s)Fig.9 Friction movement(lubrication,FH=50N,v=2mm/s)

图10 摩擦力重复性分析(FH=50N)Fig.10 Friction repeatability analysis structure(FH=50N)

表2 不同速度加载顺序的摩擦力测量值(FH=50N)Tab.2 Friction measurements at different loading rates(FH=50N)
依次按照速度从低到高、从高到低分别测试摩擦力,FH=50N时的两次测试结果见表2,重复性对比曲线见图10,由此可知,相同速度下摩擦力值存在不同大小的偏差。究其原因,先进行低速测试,滑片组经历了从小于爬行速度到爬行速度再到高速的运动过程。当速度小于爬行速度时,滑片组和滑槽之间往往处于边界润滑状态,润滑油被挤出润滑间隙,此时再进行高速测试,润滑不充分就会引起摩擦力增大。如果先进行高速测试,滑片组和滑槽润滑良好,且处于流体润滑状态,润滑状态不会被破坏,摩擦力值不会因为润滑不充分而变大。因此,摩擦力测试实验需要先进行高速润滑初始化,才能较准确地获得基于滑片速度变化的摩擦力曲线。
3.4 实验结果
使滑片组在滑槽内做低速滑动,并且当位移达0.1mm时,使其自行回转,通过对此往复回转的动态过程进行实际测量,得到摩擦力与预滑移位移的曲线,如图11所示。

图11 摩擦力-位移的关系曲线Fig.11 The friction force-displacement curve
高速初始化后,在0~80mm/s范围内取多组不同匀速直线运动速度vc,改变正压力FH的大小,重复实验,可获得不同正压力FH下的摩擦力。FH=50N时,测得的摩擦力Ff见表2;FH=40N时,测得的摩擦力Ff见表3,摩擦力与速度曲线见图12。
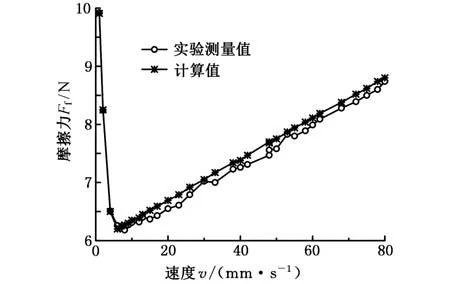
图12 摩擦力-速度的关系曲线(FH=40N)Fig.12 Friction and speed curve(FH=40N)
根据以上结果,运用自适应权重粒子群优化(PSO)算法,通过迭代计算,对LuGre摩擦模型的σ2、vs、μc、μs这4个静态参数进行辨识,结果见

表3 摩擦力实验测量值与模型计算值(FH=40N)Tab.3 Friction experiment measurements and model calculations(FH=40N)
表4,其中,自适应PSO算法公式为

式中,wmax、wmin分别为w 的最大值和最小值;f为粒子当前的目标函数值;favg、fmin分别为当前所有微粒的平均目标值和最小目标值。

表4 参数辨识结果Tab.4 Parameter identification results
由实验得到的摩擦力位移曲线,并根据鬃毛刚度系数σ0和阻尼系数σ1的关系和相应的简化计算,可以辨识得到LuGre摩擦模型的σ0和σ1这2个动态参数值,结果见表4。σ0和σ1的关系式为

式中,ξ为阻尼比。
将已经辨识出参数的LuGre摩擦模型利用MATLAB软件进行仿真计算,获得辨识模型输出的摩擦力计算值,最后将摩擦力实验测量值与计算值进行比较,如图12所示。由图12可知,当速度vc小于8mm/s时,Ff随着vc增大而迅速变小,实验摩擦力测量值和辨识模型计算值基本一致。当速度为8~80mm/s时,Ff随着vc增大而逐渐变大,摩擦力测量值低于计算值,最大偏差为2.8%,实验测量值与模型计算值基本吻合。
4 结论
(1)本文设计的摩擦力测试系统可以根据压缩机的实际工况,模拟压缩机两腔气体力对滑片均匀加载相应的正压力FH,并能实现不同速度vc的匀速直线运动下的摩擦力测量。
(2)通过实验获得基于滑片速度变化的摩擦力测试值,并获得摩擦力-速度的关系曲线和摩擦力-位移的关系曲线。
(3)利用辨识的参数代入模型,计算出摩擦力理论值,实验值与理论计算值在8~80mm/s速度区间的最大偏差为2.8%,实验结果与数值计算结果吻合,测试系统可以满足LuGre摩擦模型参数辨识的实验要求。