PZQ1400平头塔机回转机构防摇摆措施
2019-05-15石小飞王鹏阁
石小飞,王鹏阁
(华电郑州机械设计研究院有限公司,郑州 450046)
0 引言
大型平头塔式起重机(以下简称塔机)特别适用于大风地区、沿海地区、施工场地有限、作业空间受限等其他塔机不适应的大型火电项目施工工程,同时也适用于化工、石油、冶金、水电及核电等大型建筑施工项目,因此得到广泛应用。但是,大型平头塔机目前存在一个危险的现象——回转机构启停时摇摆严重,严重影响了塔机的使用体验,甚至存在安全隐患。PZQ1400型附着式自升塔机起重臂长80 m,最大起重量600 kN,回转驱动系统有4台电机。本文依托PZQ1400塔机,分析回转机构出现“摇摆”现象的原因,从电气方面着手,提出两种措施来改善这种不稳定现象。
1 大型平头塔机回转机构“摇摆”原因分析
大型平头塔机的起重臂一般有几十米甚至一百多米长,而且起重量越大的塔机,其起重臂自身的质量就越大,这样一来塔机的转动惯量就越大。在回转机构加速的过程中,要吸收这部分能量,在回转机构减速的过程中,要释放这部分能量,这就造成了塔机回转机构的不稳定[1]。接下来详细分析加速和减速过程中起重臂的运动情况,如图1所示。
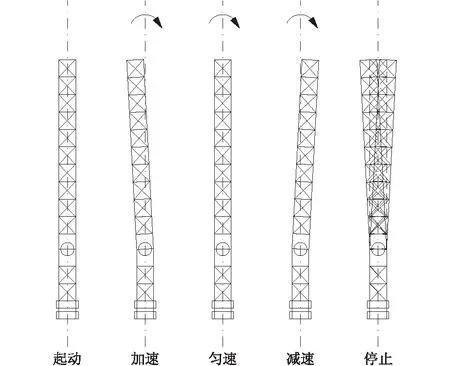
图1 加减速过程分析Fig.1 Analysis of acceleration and deceleration process
回转机构启动后,在加速过程中,驱动力矩大于阻力矩,臂尖的位置将滞后臂根的位置,造成起重臂形变;加速过程结束后,起重臂的驱动力矩与阻力矩达到平衡,起重臂的形变将逐渐恢复,因此会产生摇摆振动。
回转机构开始减速后,在减速过程中驱动力矩小于阻力矩,由于力的传输延时,臂尖的位置将超前臂根的位置,造成起重臂形变;减速过程结束后,起重臂的驱动力矩与阻力矩达到平衡,起重臂的形变又将逐渐恢复,因此同样会产生振动,停车时即表现为回摆[2]。
2 PZQ1400塔机回转防摇摆措施
大型平头塔机这种摇摆现象严重影响了起重吊装的精准性,在电气控制方面必须采取相应的措施来改善这种不良现象。本PZQ1400塔机同时采取了两种措施来改善这种现象。
2.1 第1种措施
使用涡流制动器,辅助刹车。涡流制动器产生的电磁制动力矩能够克服电动机的惯性,帮助电动机快速停止。电磁涡流制动器:激磁线圈通电时形成磁场,制动轴上的电枢旋转切割磁力线而产生涡流,电枢内的涡流与磁场相互作用形成制动力矩,辅助刹车[3]。控制方面,采用某进口品牌变频器配套的防摇摆软件,由变频器自身检测启动和停止时合适的时机,控制涡流的输入时间以及输入涡流的大小。涡流控制的原理如图2所示。变频器输出0~10 V电压信号控制涡流控制器内部晶闸管的关断来控制涡流控制器输出电压的大小,从而控制涡流制动器的制动能力[4]。采用硬件+软件的方式,在项目现场进行合理的调试,可在一定程度上减轻摇摆现象。
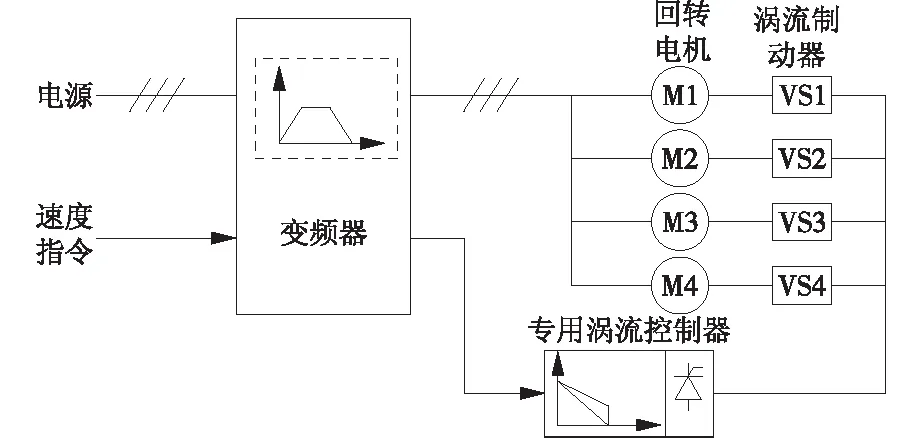
图2 涡流制动原理Fig.2 Principle of eddy current braking
2.2 第2种措施
调整4台电机制动器的抱闸时间间隔。每台电机的制动器必须由单独的接触器控制。间隔时间在可编程逻辑控制器(PLC)程序中做调整,可以通过反复试验,观察制动效果,调整出合理的间隔时间。在这种场合,要求输入有效时,立即有输出,而输入信号断开时,输出信号延时一段时间才断开,可以用断开延时定时器(TOF)来实现[5]。方案1:停止时第1台电机先抱闸,间隔一定时间第2台电机再抱闸,依次类推,避免4台电机同时抱闸时产生剧烈抖动。抱闸间隔控制的PLC程序如图3a所示。方案2:4个制动器分两组,对角线上的2台电机为一组。停止时第1组先抱闸,间隔几秒后第2组抱闸,最终让塔机稳定地停止下来[6]。抱闸间隔控制的PLC程序如图3b所示。现场调试时可反复调整断开延时定时器T42,T43,T44的时间设置。
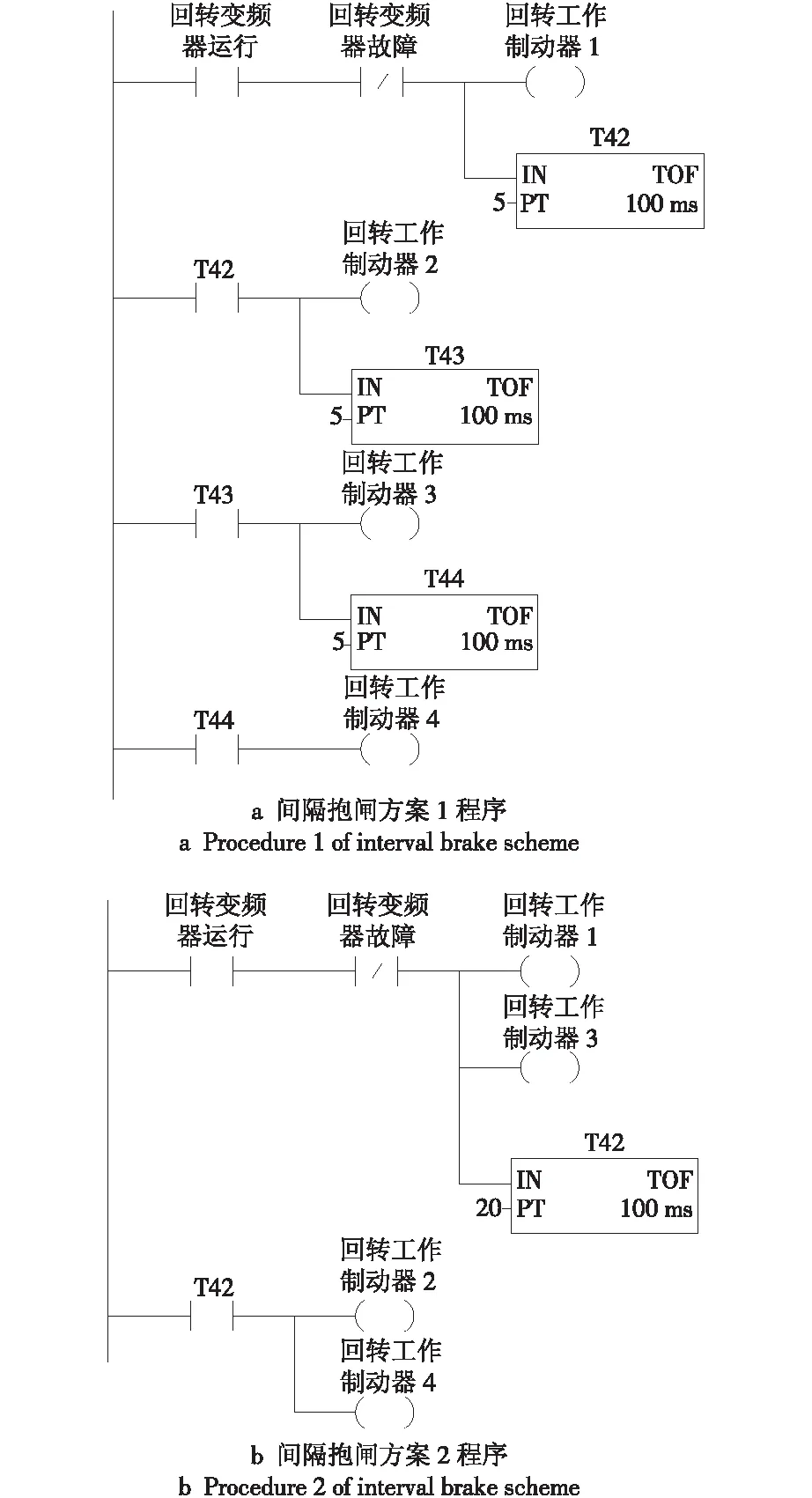
图3 间隔抱闸程序Fig.3 Interval brake procedure
3 现场调试
3.1 涡流控制调试
塔机正常运行给停止信号后,塔机慢慢停止,起重臂停止后走过的距离较长,减少减速时间,停止后走过的距离依然较长。检查参数后把L3-04设置为0,停止过程正常,走过的距离在正常范围内。
设置加速过程的涡流控制参数:设置涡流开始的电压为4 V(变频器参数S1-35),在5 Hz(变频器参数S1-01)时开始逐渐减少涡流的介入,在15 Hz(变频器参数S1-02)时停止涡流的介入。设置减速过程的涡流控制参数:在30 Hz(变频器参数S1-03)时开始减速过程的涡流介入,在18 Hz(变频器参数S1-04)时达到8 V(变频器参数S1-37),并维持到10 Hz(变频器参数S1-05),然后涡流大小逐步减小。在停止时,DWELL(防摆功能)频率6 Hz(变频器参数B6-03)时降到6 V(变频器参数S1-38),然后停止涡流介入,并维持3 s(停止时DWELL频率保持时间,变频器参数B6-04),随后开始介入涡流,加至10 V(变频器参数S1-40),停止指令结束后10 s(变频器参数S1-42)内逐步减小涡流大小,降至6 V后维持10 s(变频器参数S1-43),随后停止涡流介入。针对塔机停止时的回摆现象,加减速时间分段设置,7 Hz以内的减速时间(变频器参数C1-08)设置为24 s,7 Hz以上的减速时间(变频器参数C1-02)设置为18 s[7-8]。
进行加速过程中减速测试,此时司机室内能感受到明显的振动,针对这种现象,调整涡流的滤波时间(变频器参数S1-50),把滤波时间慢慢调整到2 s后,振动减小。
最终调试完成后,塔机运行时速度和涡流曲线如图4所示。
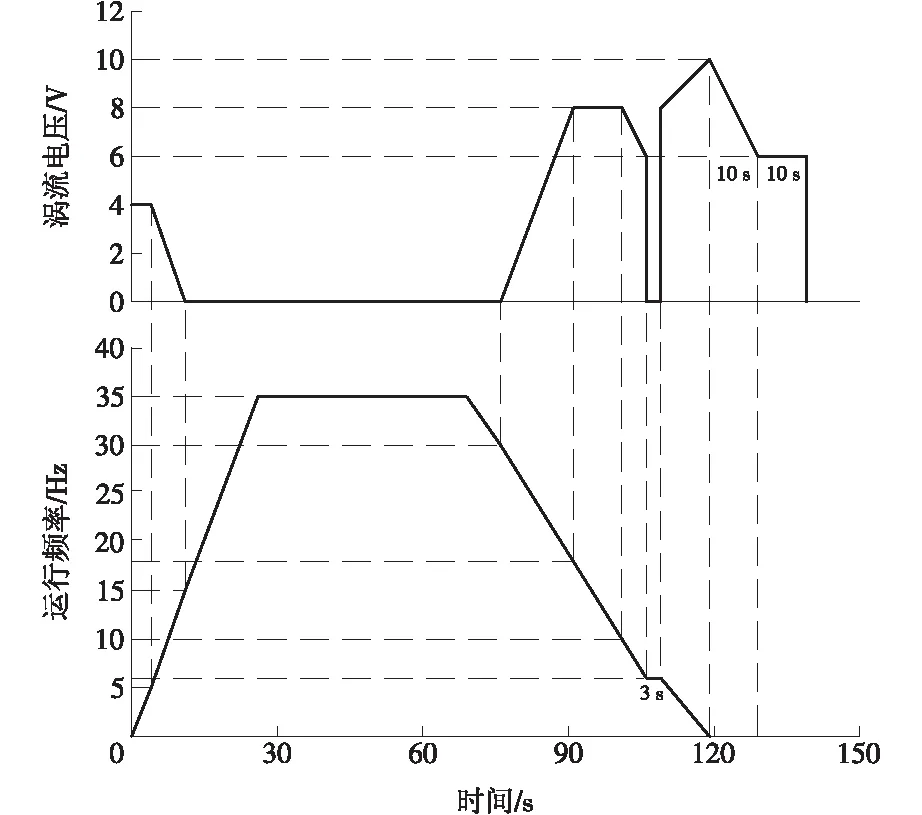
图4 塔机运行时速度曲线(下)和涡流曲线(上)Fig.4 Operating speed curve(down) and eddy current curve(up) of tower crane
3.2 间隔抱闸调试
测试方案1:先给定所有定时器0.5 s的间隔时间,观察制动效果,发现由于间隔时间较短,制动效果无明显改善。给定所有定时器1.0 s的间隔时间,再次观察制动效果。经反复调试,最终发现摇摆现象没有得到显著改善。测试方案2:先给定T42定时器2.0 s的时间,发现制动效果有所改善。最终经反复测试,定时器时间设定为4.0 s,摇摆现象得到显著改善。
4 结束语
在设计大型平头塔机回转机构的电气控制系统时,一定要注意采取措施减少启停时惯性带来的起重臂摇摆问题。本文讲述的两种措施,已经应用于PZQ1400塔机上,经过现场多次调试,很大程度地缓解了这种现象,取得了不错的停车效果,有助于塔机的精准吊装。
