广播级摄像机灰度还原一致性调整探讨
2019-05-11朱立江苏省广播电视总台
朱立 江苏省广播电视总台
1.调整概述言
伴随当前电视节目制作的大型化以及观众对节目更高的审美需求,多机位拍摄已经成为目前主流大型综艺、体育赛事等节目的趋势,而多机位拍摄带来的一大问题就是所有摄像机画面还原是否能够一致。在大型节目制作经常出现的情况是两台不同摄像机拍摄同一场景时,画面的色彩、饱和度、对比度等主观视觉效果不一致,即使是在使用基础上对 RGB 增益、黑电平、伽马等参数进行调整仍然不尽人意。如果在拍摄开始之前,就对所有摄像机的一致性进行校正,借助客观仪器的测试和调整,往往能在主观上达到很好的效果。
由于摄像机的镜头、分光系统等特性并不是理想的,所以经过CCD之后的电信号不仅很弱,而且有很多缺陷,并且经过放大电路之后,缺陷会更为明显。因此摄像机视频信号处理放大器中的设计和调节对最终的成像质量影响很大,从而对摄像机的客观指标的调整显得更为重要。
根据当前节目制作的习惯,调整所有摄像机一致性首先应以某一台摄像机作为标准机,其它摄像机作为目标机,在对标准机进行调整之后再以其为参考调整其余的目标机。
2.标准摄像机的测试和调整
摄像机调整所用的测试卡采用测试专用灰度卡,如图1所示。
2.1 测试环境
(1)测试环境应尽量避免反射光和杂散光影响。
(2)两个测试灯具应相对测试卡对称,光轴与测试卡法线的角度约45°。
(3)测试灯具光轴高度与摄像机镜头光轴高度应一致。

图 1 灰度卡

图 2 测试场景
(4)测试卡的中心法线与镜头的光轴应重合。
(5)反射式测试卡上的照度应为 2000±20lx ,色温应为 3100±100K 。
(6)摄像机拍摄测试卡时取标准画面尺寸,应将四个边上的定位三角对准监视器的画面边界。
(7)采用标准镜头测试,摄像机距离测试卡 3±0.5 米。
测试场景如图 2 所示。
2.2 调整步骤
(1)调整前需要将摄像机的部分功能关闭:
Knee OFF(自动拐点关闭):如果拐点打开拍摄灰度卡,超过拐点电平的部分将被压缩,这将很难比对高亮部分伽马的准确位置。
White Clip OFF(白切割关闭):在用灰度卡做基准调整时,必须设定 100% 白信号作为基准信号。如果白切割功能设定值低于100%时,需要重置此数值或者设定值改为高于100%(松下 HC-2500 的工厂初始化设定是 109%,一般设置为 110%-115%)。
DTL OFF(细节关闭):如果细节功能打开,噪波会增加,不利于在示波器上的确认。
在关闭上述功能之后,对摄像机进行三次 ABBAWB 的调整以获得较好的准备数据。
(2)黑电平的建立
在增益调节电路之前,必须使黑色电平和消隐电平一致为0,从而保证改变增益时黑色电平不变。由于摄像机输出端的消隐电平不一定与前面各级电路的消隐电平相同,所以黑电平的提升是有必要的。通常情况下,当消隐电平为0时,黑色电平为 14-35mv (白色电平的2%-5%)。 黑电平的建立是所有调节的基础,在摄像机调整之前都需要首先确立黑电平的位置。
调整黑电平的方法为关闭光圈,通过示波器检查电平的位置,RGB 三路黑电平应当为设定值(白色电平的2%-5%),如果某一路黑电平波形显示偏离,则需要对相应的黑电平进行调节以获得正确的黑电平值。黑电平波形如图3所示。

图 3 黑电平波形
如果校正时发现波形倾斜或者噪点比较多,则需要进行黑斑校正。以松下 HC-2500 摄像机为例,在摄像机头进入 DESIGN MENU ,执行一次自动黑斑校正。黑斑不良的状况如图4所示。
校正完毕通过示波器的矢量图进行检测,此时正确的信号应该是矢量图中心位置的一个点,确认完毕后再对摄像机执行2-3次 ABB 操作以获得较为准确的ABB数据。黑电平矢量图如图5所示。
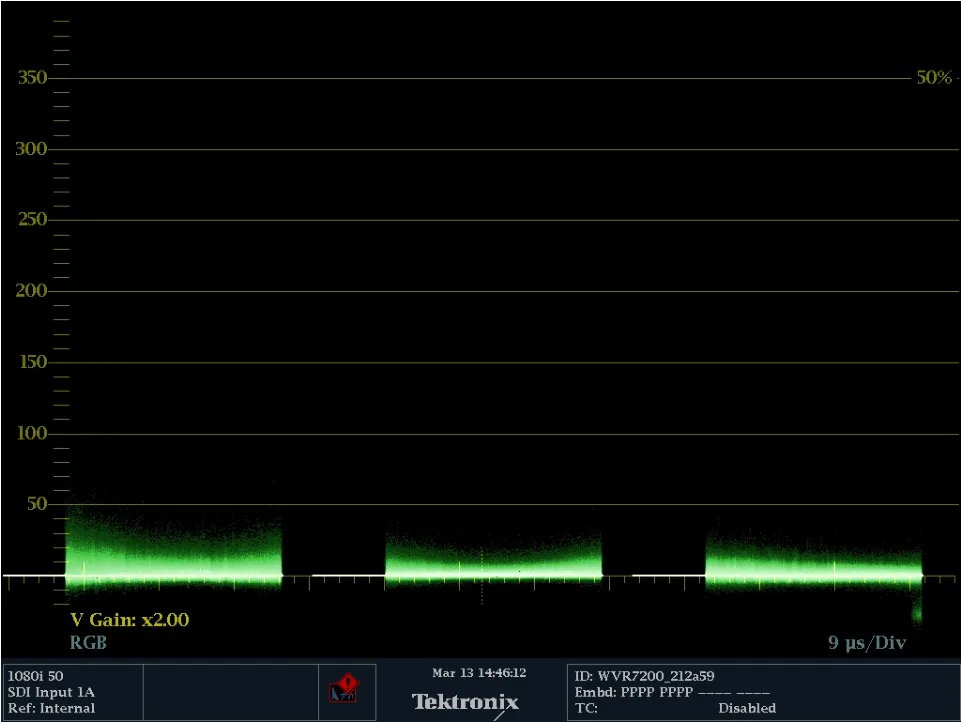
图 4 黑斑不良

图5 黑平衡正确的矢量波形
(3)确认 γ 校正
γ 校正意义主要在于修正摄像 - 显像系统的非线性,如果γ校正出现一定的偏差则不能正确还原被摄景物的亮度信息,并且伽马校正可以降低视频信号噪声,提高低电平有效分辨率。校正方法:在完成黑电平建立和黑斑校正后,打开光圈,摄像机拍摄灰度卡,提升光圈至白电平位置在 100% 即 700mv 处。此时再进行 2-3 次的 ABB、AWB 操作以获得较为准确的白平衡和黑平衡数据,观察示波器的 RGB 三路波形,如图6所示。
首先调整主伽马( Master gamma ),使 G 路交叉点在白电平的58%位置。调整完毕后观察R、B两路的伽马位置,如果该两路的交叉点位置与G路不一致,则分别调整该两路的伽马值使其与G路伽马一致。调整完毕后再进行2-3次 ABB、AWB, 获得较为准确的白平衡和黑平衡数据。伽马位置确认如图7所示。

图 6 白电平 100% 位置

图 7 伽马位置确认
(4)杂散光( Flare )校正
入射光通过镜头时会在各透镜中产生一定的反射量,该部分反射在各镜片之间反复反射和投射,以及 CCD 的晶体结构和各半导体之间产生的少量反射光会形成杂散光。杂散光提高了白色周围的电平,使得图像黑白对比度下降,图像上来看会显得蒙上了一层雾。所以杂散光的校正对提高图像质量有极大的帮助。
校正方法:在白电平 100% 位置时,通过示波器观察 Flare 的位置,首先调整 G 路的 Flare,以松下 HC-2500 高清摄像机为例,Flare位置应当在白电平的12%位置, G 路调整完毕后再调节R路和B路的 Flare 位置。调整完毕后再进行 2-3 次 ABB、AWB ,获得较为准确的白平衡和黑平衡数据。杂散光位置确认如图8所示。
(5)白切割( White Clip )和拐点( Knee )位置的确认
为了提高摄像机的动态范围,在电平为 100%-115% 部分采取了白压缩的方式,由此在摄像机的入射光超过 200% 之后,输出信号的电平才达到白切割电平,从而扩大了动态范围。但是在拍摄高对比度的图像时, 200% 的动态范围是远远不够的,此时可以通过降低拐点电平的方式提高摄像机的动态范围,一般情况下拐点降低到白色电平的 85% 位置时,动态范围可以高达 600% 。由于拐点以上的灰度层次不够鲜明,所以在入射光不强的情况下应当提高拐点以扩大亮度传输特性的线性范围。拐点的值可以根据实际使用进行设置。
由此可见,白切割电平决定了重现图像的最大亮度,高于白电平部分的图像为没有亮度层次的一片白色。拐点位置决定了图像的动态范围。
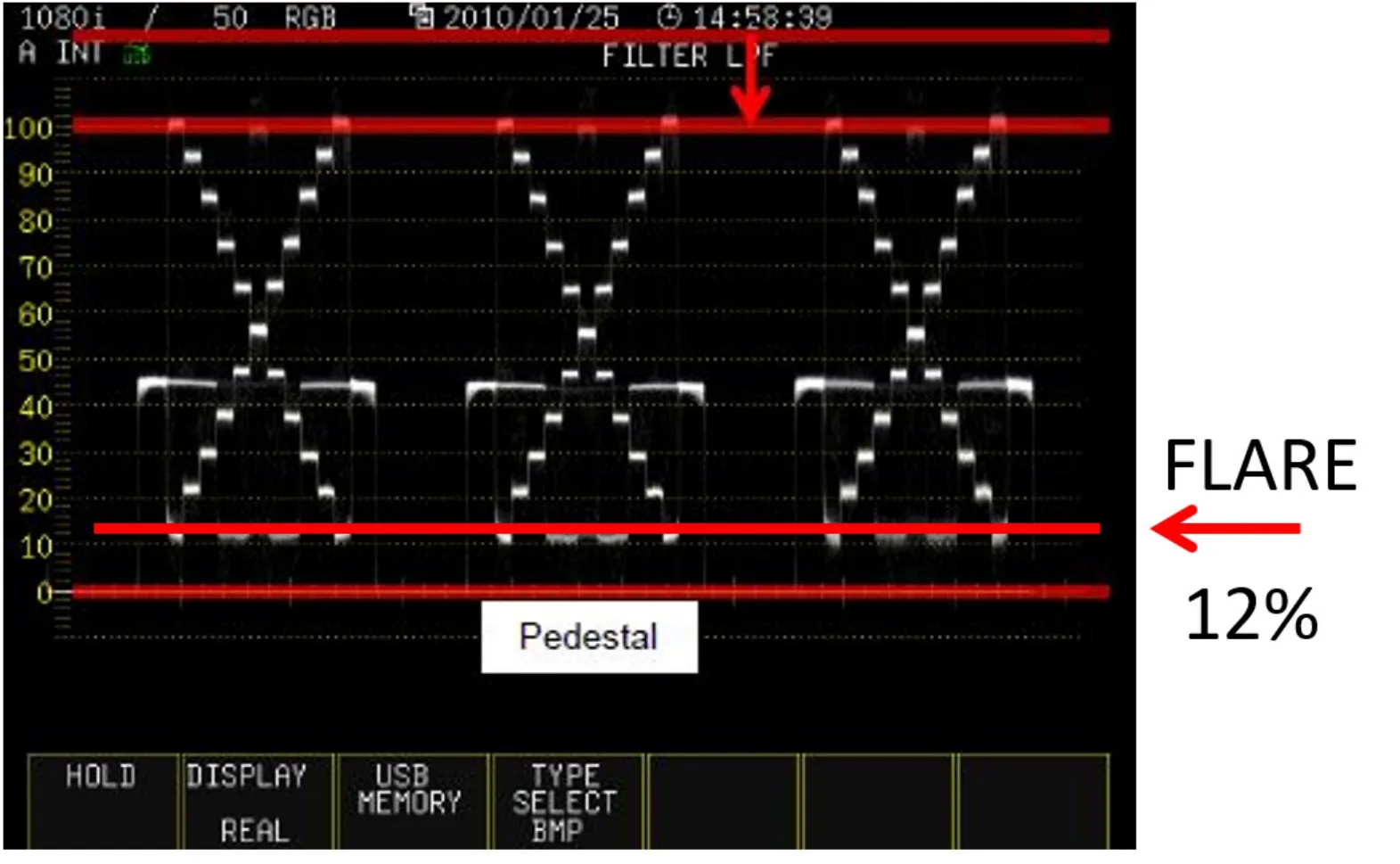
图 8 杂散光位置确认

图 9 拐点位置确认

图11 白切割电平位置确认
确认方法:根据节目制作习惯,设置拐点值,以常态在演播室使用的摄像机来看,适合设置更高的拐点值,一般设置为 95% 。在摄像机操作面板将拐点设置为 95% ,通过示波器观察 95% 以上的波形是否发生变化。拐点位置如图9所示。
确认完毕拐点后需要对拐点以上的传输特性斜率进行检查, RGB 三路的斜率是否一致。通过增加两档光圈或者 +6dB 增益观察 RGB 三路斜率,如果不一致则要进入摄像机的 Slope 菜单进行调整。斜率位置确认如图10所示。
继续增大光圈,检查白切割电平位置是否与设定值一致,一般将白切割电平设定在白电平的 110%-115% 位置。白切割位置确认如图11所示。
上述所有步骤调整完毕后,变化光圈确认 RGB 三路各点位置变化是否一致,至此,标准摄像机的调整完毕。
3.目标摄像机的调整
首先将目标摄像机的信号输出接到示波器的第二路输入上,通过示波器可以对比两路摄像机的波形。目标摄像机的调整和标准摄像机调整步骤一致。
(1)1Knee OFF(自动拐点关闭)、White Clip OFF(白切割关闭)、DTL OFF(细节关闭);
(2)黑电平建立和黑斑校正,调整方法和标准摄像机相同;
(3)确认 γ 校正,可以通过示波器观察目标摄像机和标准摄像机的主伽马( Master gamma )的位置,确认完毕后观察目标摄像机的R路伽马和B路伽马是否和主伽马一致;
(4)杂散光( Flare )位置,首先通过示波器观察目标摄像机和标准摄像机的主杂散光( Master Flare )的位置,确认完毕后观察目标摄像机的R路杂散光和B路杂散光是否和主杂散光位置一致;
(5)目标摄像机的白切割( White Clip )和拐点( Kne-e )位置,确认和标准摄像机一致,设置和确认完毕后同样需要检查 RGB 三路的斜率。
上述所有步骤调整完毕后,变化光圈确认 RGB 三路各点位置变化是否一致。至此,一台目标摄像机调整完毕。按照此步骤调整剩余的目标摄像机。
4.注意事项
在整个调整过程中,每个步骤结束后都建议进行 2-3 次 ABB、AWB, 以获得更为准确的黑、白平衡数据。
调整完毕后需要注意的是,在正常拍摄中,画面发生变化时,尽量不去调整黑电平的值,如果画面需要改变主观对比度,建议进入摄像机的 Black Gamma 菜单进行调整,因为直接调整黑电平会对整体的黑平衡产生破坏。
通常很多摄像机带有自动拐点或者自动动态范围调整功能,但是在诸如演播室工作的情况下,入射光不会发生剧烈变化,可以关闭自动拐点或者自动动态范围调整功能,手动设置一个比较适合当前固定场景的拐点值。
