自稳定双拼相机低空无人飞艇航测系统
2019-05-09王长虹
王长虹, 陈 胜, 黄 挺
(湖南省第三测绘院,湖南 长沙 410118)
自稳定双拼相机低空无人飞艇航测系统比传统航空摄影测绘技术有着更高性能表现,在面对外界各类干扰因素时,也能够表现出较高的稳定性,使航空摄影测绘技术的应用范围增大,可广泛应用于如暴风、海洋资源等复杂的环境中进行测绘。
1 自稳定双拼相机低空无人飞艇航测系统组成
自稳定双拼相机低空无人飞艇航测系统由6大部分组成。
(1)无人驾驶飞艇:主要功能在于搭载摄影设备、依照指令进行飞行移动。
(2)飞行控制系统:属于整体系统架构中,是控制无人驾驶飞艇的程控系统之一。
(3)遥测遥控系统:属于整体系统架构,是控制无人驾驶飞艇的遥控系统之一。
(4)遥感设备:遥测遥控系统的主要设备。
(5)自控制系统:属于整体系统架构,是控制无人驾驶飞艇的自控系统之一。
(6)数据处理系统:负责对外界收集的各类信息进行处理,确保无人驾驶飞艇飞行稳定与摄影图像的精确性。
通过上述架构,可以实现3种自稳定双拼相机低空无人飞艇航测系统的控制模式,即程控、遥控、自控,有较好的可靠性、控制精度,实现系统工程化的目标,图1为无人飞艇航测例图。
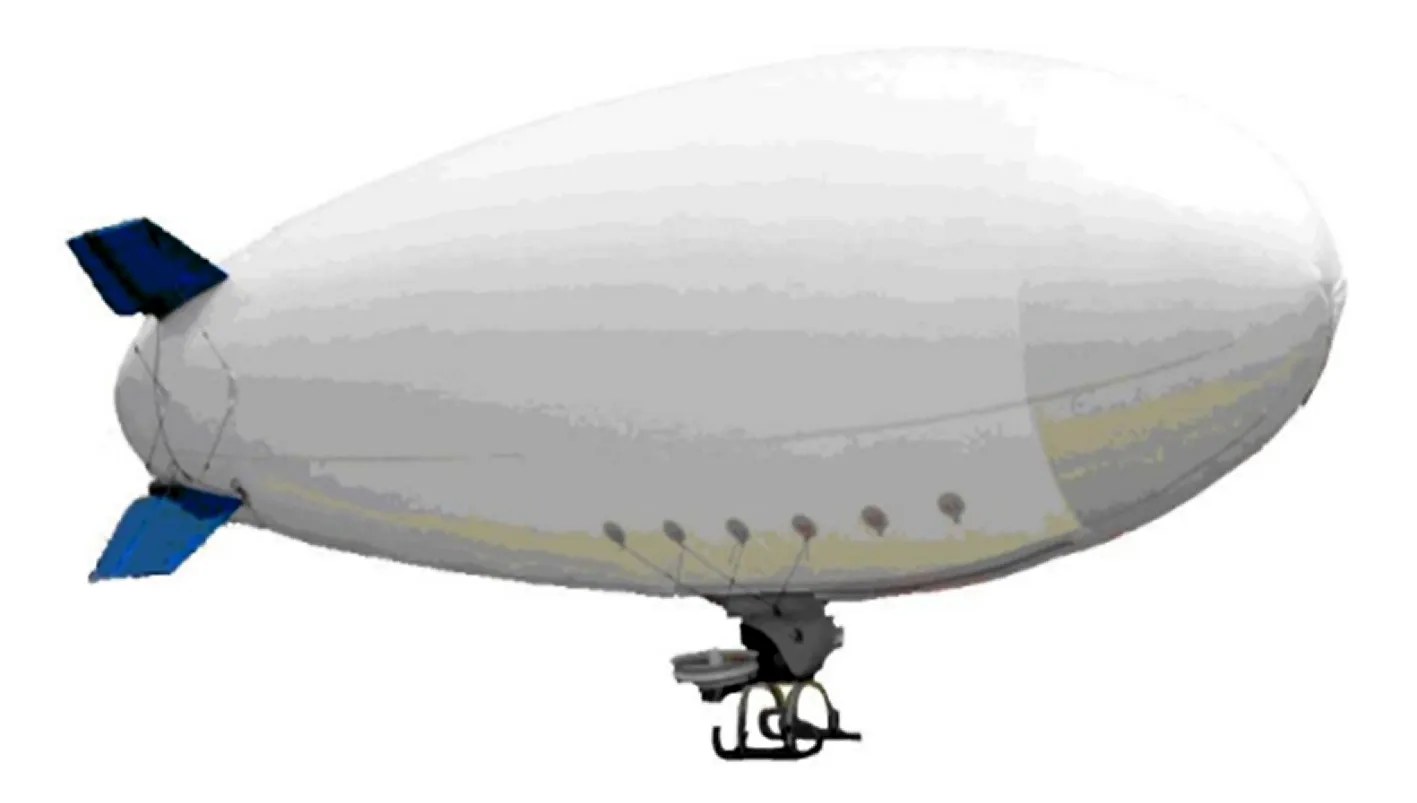
图1 无人飞艇航测例图
2 自稳定双拼相机低空无人飞艇航测系统关键设备
2.1 双轴稳定平台
无人飞艇的规模较大、自重较大,如果直接将其投放在高空环境中,飞艇很容易受到高空气流的影响,尤其在大风天气,飞艇飞行无法保持稳定。为了避免外界因素的干扰,自稳定双拼相机低空无人飞艇航测系统采用了双轴稳定平台。
该平台主要安装于飞艇下部,由整体支架、遥感设备与三向轴三部分组成,结构连接主要采用电机齿轮,当飞艇偏转或晃动时,齿轮可保障摄影设备的稳定。具体原理为:当飞艇发生偏转等现象时,遥感设备可以将偏转角度形成电信号,通过电信号的传输驱动三轴齿轮转动,即可在偏转之下保持摄影设备的水平状态,保障摄影图像的清晰稳定。根据测试,目前双轴稳定平台可以在4级风力的情况下保障摄影设备的稳定,能够满足航空摄影测量的要求。
2.2 双拼相机
为了保障摄影图像的清晰,在自稳定双拼相机低空无人飞艇航测系统中,需要高程精度较高、处理时间短、基线长的摄影设备,虽然目前市面上许多摄影设备能满足这些要求,但存在体积大、重量重、易受损等问题,不适于飞行平台特别是无人飞艇的要求。
双拼相机是在满足上述系统需求的基础上,对一般设备缺陷进行改善而开发的一种摄影设备,在实际应用中,双拼相机除了改善了上述传统摄影设备的缺陷,还具有成像像幅大、成像数量少、自重较轻等诸多优势。据相关数据显示,双拼相机的低空摄影图像精度可达1∶1000,能够满足现代测绘工作的要求。
2.3 系统技术参数
自稳定双拼相机低空无人飞艇航测系统主要技术参数如表1、表2所示。
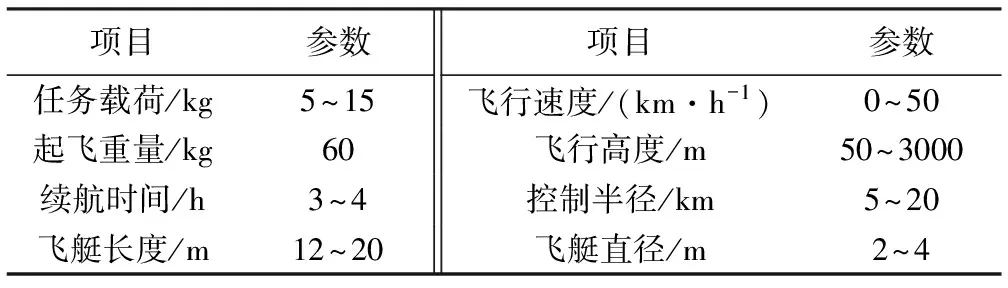
表1 自稳定双拼相机低空无人飞艇主要技术参数

表2 传感器性能参数表
3 自稳定双拼相机低空无人飞艇航测系统关键技术
3.1 相机检校技术
双拼相机属于非量测数码相机,此类相机的内部方位元素无法被预测,容易造成拍摄图像畸变,所以必须先对相机进行检校,通过检校标定出数码相机的各项参数值,保障摄影的精确性。非量测数码检校中主要采用光学畸变系数调整技术改变相机内部的光学元素。
但由于不同型号的相机在设计与制造工艺上的不同,所以在采用光学畸变系数调整技术进行检校时,不可以依照统一参数进行调节,需要对相机间的相对外方位元素进行确认,并在之后的图像处理中,将元素作为初始参数进行运算,最终得出对于各型号相机的光学元素调整指标。此外,相机间的相对外方位元素的确认可以利用空间后方交会原理来求取。具体操作上,首先将双拼相机固定后进行拍摄,之后结合原理计算双向相机拍摄时的外方位元素,即可得出双拼相机的对虚平面坐标系的相对外方位元素。
3.2 图像后期处理技术
图像后期处理技术主要包括图像拼接、角度调节两种。
(1)双拼相机图像拼接技术。双拼相机的图像拼接处理需要根据相应原则进行,首先,要确认单体相机的畸变差是否改正,然后将倾斜图像调整为水平图像,对水平图像重叠区域内的影像进行特征匹配得到同名点。其次,利用同名点对各子图像进行内部相对定向处理,通过计算得出子图像中的相对外方位元素,再利用这些外方位元素将子图像投影至虚拟水平面上,最终即可完成子图像拼接。此外,因为拼接可能会造成图像分辨率下降,所以在拼接处理时,需要保障虚拟距离与实际主距相同。
(2)双拼相机角度调节技术。传统的航空测绘工作中时常因为风力、气流等因素导致航拍图像出现质量差、数量多、角度倾斜幅度较大、图像重叠不规则等问题,导致图像角度调节工作的难度较大。为了改善传统图像角度调节工作的不足,研发了Map-AT软件,该软件结合了多种图像角度调节的数学模型,能够有效对面阵航摄胶片相机、数码相机、组合宽角相机的图像进行处理。在实际应用中,该软件具有高效率、自动化程度高、数据处理工作量大的优点。多项案例证实,通过该软件处理后,倾斜度较大、重叠不规则图像均被修正为水平图像。
4 实例验证
为了证实自稳定双拼相机低空无人飞艇航测系统的有效性,本文结合实例进行分析。在本次测绘区域内,西面存在一座高度为100 m左右的山坡,东、南、北三面地势平缓,整体区域中存在大量建筑物,高度约为20 m,在此基础上采用无人飞艇航测系统进行拍摄,拍摄依照《城市测量规范》(6CJJ8—99)进行。
应用自稳定双拼相机低空无人飞艇航测系统,航拍图像的分辨率较高,能够满足现代测绘工作的要求,并利用图像后期处理技术,图像没有出现不规则、大倾角等问题,说明应用该系统后,航拍图像的精确度得到了提高。
